
引言
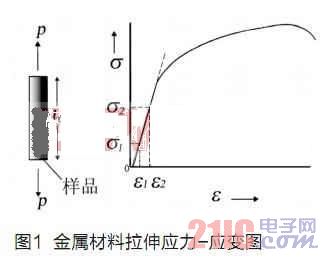
應(yīng)變" title="應(yīng)變">應(yīng)變是材料測(cè)試中的重要參數(shù),材料力學(xué)的一個(gè)重要研究領(lǐng)域是通過(guò)建立材料的應(yīng)力-應(yīng)變關(guān)系如圖1,研究和預(yù)測(cè)材料的力學(xué)行為[1],所以應(yīng)變的獲取關(guān)系到是否能正確和有效地構(gòu)建材料的本構(gòu)方程。在實(shí)驗(yàn)力學(xué)中,應(yīng)變并非直接測(cè)量" title="測(cè)量">測(cè)量,它是通過(guò)對(duì)材料絕對(duì)變形測(cè)量后再按照相應(yīng)的應(yīng)變定義計(jì)算得出。
實(shí)際中通常采用機(jī)械式引伸計(jì)夾持在工件上,對(duì)工件施加載荷的同時(shí)進(jìn)行測(cè)量。對(duì)于剛性材料,應(yīng)變一般可以使用傳統(tǒng)的機(jī)械夾持式引伸計(jì)進(jìn)行測(cè)量。然而,這類裝置對(duì)諸如纖維、薄膜、泡沫等軟塑性材料的工件就無(wú)法使用,因?yàn)樗鼈兊闹亓亢蛫A持方法都會(huì)影響試驗(yàn)結(jié)果與斷裂點(diǎn)。在實(shí)際情況下,需要測(cè)知超大應(yīng)變范圍直至斷裂的材料性能,受行程限制,機(jī)械式引伸計(jì)需要在試件斷裂前提下,對(duì)于一些特定環(huán)境條件下的工件,例如高溫條件,機(jī)械引伸計(jì)使用也會(huì)受到限制。
為減少測(cè)量誤差、提高測(cè)量的精度及提高實(shí)際的適用范圍。在材料拉伸試驗(yàn)的背景下,設(shè)計(jì)" title="設(shè)計(jì)">設(shè)計(jì)并采用視頻" title="視頻">視頻應(yīng)變測(cè)量系統(tǒng)" title="系統(tǒng)">系統(tǒng)間接測(cè)量材料拉伸試驗(yàn)中實(shí)時(shí)變化的應(yīng)變。該應(yīng)變測(cè)量系統(tǒng)既要滿足試驗(yàn)的測(cè)量精度,又要保證測(cè)量的實(shí)時(shí)性。文中在材料拉伸試驗(yàn)應(yīng)變測(cè)量的精密邊緣檢測(cè)算[2,3]法進(jìn)行了深入研究,在成熟的小波" title="小波">小波變換" title="變換">變換理論下,創(chuàng)新地將小波變換期望亞像素算法應(yīng)用于視頻應(yīng)變測(cè)量系統(tǒng)設(shè)計(jì)中。
小波變換期望值亞像素定位法
小波分析是一種多分辨率分析[4],能在時(shí)域和頻域突出信號(hào)的局部特征,現(xiàn)已廣泛應(yīng)用于去噪和邊緣檢測(cè)等圖像處理領(lǐng)域。
小波變換邊緣檢測(cè)原理
一維小波函數(shù)表示如下:

圖像函數(shù)f(x)在小波尺度a下的小波變換由卷積運(yùn)算得到:

對(duì)于某些特殊的小波函數(shù),小波變換的模極大值對(duì)應(yīng)信號(hào)的突變點(diǎn)。設(shè)是一個(gè)平滑的函數(shù),定義為的一階導(dǎo)數(shù):

記作,則在小波尺度a下的小波變換就為:

小波變換正比于被平滑的函數(shù)f(x)的一階導(dǎo)數(shù),則的極大值對(duì)應(yīng)的是導(dǎo)數(shù)的極大值,它也正是在小波尺度a下,信號(hào)的局部突變點(diǎn)。因此,小波變換模極大值檢測(cè)可應(yīng)用于圖像的邊緣檢測(cè)[5]。
小波變換期望值亞像素定位法原理
設(shè)一維理想邊緣模型為:

其中,
對(duì)實(shí)際的成像系統(tǒng),由于CCD是積分器件,它的輸出灰度值與其感光面上的光強(qiáng)分布相關(guān)。設(shè)G(x)表示成像系統(tǒng)點(diǎn)擴(kuò)展函數(shù),其通常可用高斯函數(shù)近似表示:

成像系統(tǒng)所獲取的理想邊緣無(wú)噪聲圖像為:

其中:x0為邊緣圖像的準(zhǔn)確位置。
設(shè)wf1(a,x)表示,在小波尺度a下的小波變換系數(shù),p(x)為大于給定閾值T的小波變換系數(shù)概率。推導(dǎo)經(jīng)CCD成像(含實(shí)際噪聲)后邊緣圖像的準(zhǔn)確位置。

期望值即是理想邊緣經(jīng)成像系統(tǒng)所得實(shí)際圖像邊緣的準(zhǔn)確位置。
對(duì)于離散信號(hào),設(shè)是圖像邊緣信號(hào)的小波變換系數(shù),為大于給定閾值T的概率,E是階躍邊緣位置x的期望值,則有:

由此得到的小波系數(shù)期望值E即為圖像邊緣的準(zhǔn)確位置。
小波變換期望值亞像素定位法求解步驟
小波變換期望值亞像素邊緣檢測(cè)具體定位步驟如下:
1)選擇一個(gè)小波尺度a,對(duì)給定的數(shù)據(jù)執(zhí)行小波變換;
2)求出在小波尺度a下的小波變換系數(shù)的模極大值;
3)濾除由噪聲產(chǎn)生的,小波變換系數(shù)中隨小波尺度a的增加而減小的模極大值;
4)給定一閾值T,濾除由噪聲與微小細(xì)節(jié)生成的模極大值;
5)在模極大值附近,尋找和模極大值同符號(hào)的小波系數(shù)區(qū)間,該區(qū)間內(nèi)的小波變換系數(shù)由式(12)求期望,所得期望值即是圖像邊緣的亞像素位置。
理論可證明,小波變換邊緣檢測(cè)定位法不存在原理誤差,同時(shí)具有較強(qiáng)的抗噪性能。有關(guān)試驗(yàn)已表明,在對(duì)光源等環(huán)境條件沒有特殊要求的情況下,其邊緣定位檢測(cè)的精度能夠在0.02個(gè)像素以內(nèi)[5],驗(yàn)證了理論的正確性。另外,小波變換期望值邊緣檢測(cè)亞像素定位法是建立在信號(hào)小波變換基礎(chǔ)上的,而Mallat方法的提出,使得小波變換的速度大大提高[4],因此小波變換期望值邊緣檢測(cè)亞像素定位法,無(wú)論是在其精度、抗噪性能還是速度等方面,都已有比較優(yōu)越的性能。
測(cè)量試驗(yàn)與結(jié)果
試驗(yàn)設(shè)備及系統(tǒng)軟件設(shè)計(jì)
試驗(yàn)硬件:CCD——德國(guó)Basler A601f;鏡頭——Computar公司的H6Z0812鏡頭;圖像處理卡——Matrox公司的Meteor-Ⅱ/1394卡;光源——自制的LED面光源。試驗(yàn)過(guò)程中采用材料試驗(yàn)機(jī)進(jìn)行動(dòng)態(tài)拉伸試驗(yàn)。所使用的材料試驗(yàn)機(jī)具體參數(shù)為:力測(cè)量精度在負(fù)荷傳感器容量的0.4%~100%范圍內(nèi),精度為示值的±0.5%;位移速度精度優(yōu)于±0.5﹪(空載、檢測(cè)距離大于20mm)。試驗(yàn)設(shè)備如圖2所示:
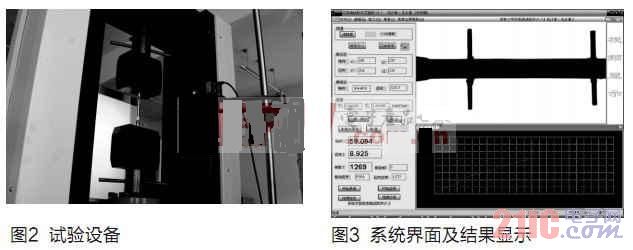
在Windows XP操作系統(tǒng)下,利用Visual C++高級(jí)語(yǔ)言編制系統(tǒng)軟件[6,7],實(shí)現(xiàn)" title="實(shí)現(xiàn)">實(shí)現(xiàn)算法操作,系統(tǒng)界面及顯示結(jié)果如圖3。
根據(jù)試驗(yàn)數(shù)據(jù)的精密度評(píng)定方法,在試驗(yàn)中,得到的測(cè)量值M由真值T與實(shí)驗(yàn)誤差δ兩部分組成,即M=T±δ。真值是未知的,一般采用多次測(cè)量求算術(shù)平均值作為其真值。

采集頻率對(duì)系統(tǒng)算法實(shí)現(xiàn)的影響
視頻應(yīng)變測(cè)量系統(tǒng)應(yīng)用于動(dòng)態(tài)圖像測(cè)量,因此需研究影響系統(tǒng)數(shù)據(jù)結(jié)果的時(shí)間因素,即分析不同采集頻率對(duì)小波變換期望亞像素算法精度的影響。
試驗(yàn)條件:三角架放在試驗(yàn)機(jī)上,固定攝像機(jī),距試件大約200mm附近,具體距離根據(jù)工件圖像清晰程度調(diào)節(jié),裝置如圖2所示,用引伸計(jì)作為標(biāo)記。打開試驗(yàn)機(jī),開始試驗(yàn),動(dòng)橫梁向下移動(dòng),選定橫梁移動(dòng)速度約3mm/min,工件進(jìn)入拉伸試驗(yàn)階段,攝像機(jī)采集試驗(yàn)數(shù)據(jù),進(jìn)行分析計(jì)算。具體試驗(yàn)參數(shù)如下:試驗(yàn)機(jī)拉伸速度3mm/min;光照度726LUX;物距192mm;測(cè)量標(biāo)距50mm;光圈5;焦距14。
1、采集頻率15幀/秒
在圖4為在相機(jī)采集的數(shù)據(jù)中,把幀數(shù)換算為時(shí)間,與試驗(yàn)機(jī)采集的時(shí)間相匹配作為橫坐標(biāo),縱坐標(biāo)為變形值,虛線是引伸計(jì)采集數(shù)據(jù),實(shí)線是相機(jī)采集的數(shù)據(jù)。
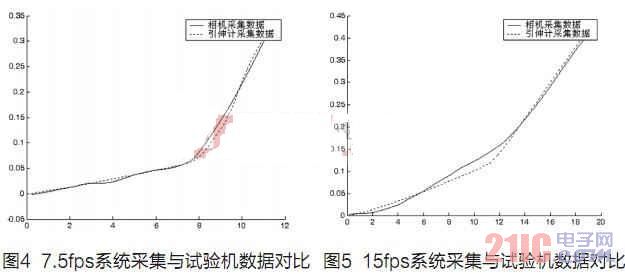
當(dāng)采集頻率7.5幀/秒時(shí),相機(jī)采集數(shù)據(jù)與引伸計(jì)采集數(shù)據(jù)的平均誤差為:
![]()
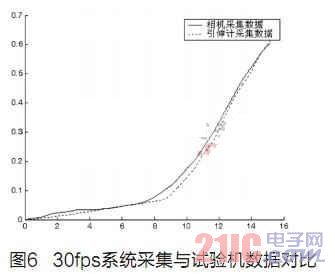
2、采集頻率15幀/秒
同上處理得出,當(dāng)采集頻率15幀/秒時(shí),相機(jī)采集數(shù)據(jù)與引伸計(jì)采集數(shù)據(jù)的平均誤差為:
![]()
3、采集頻率為30幀/秒
采集頻率30幀/秒時(shí),相機(jī)采集數(shù)據(jù)與引伸計(jì)采集數(shù)據(jù)的平均誤差為:
![]()
通過(guò)對(duì)視頻應(yīng)變測(cè)量系統(tǒng)數(shù)據(jù)結(jié)果在不同圖像采集頻率下的分析,可以得出在光照、物距、焦距等外界因素不變的條件下,隨著相機(jī)采集頻率(7.5幀/秒、15幀/秒、30幀/秒)的提高,數(shù)據(jù)誤差會(huì)隨著增大。但該系統(tǒng)在30幀/秒情況下,可以滿足一定的誤差要求,而不至于誤差過(guò)大,使得測(cè)量結(jié)果不精確。
結(jié)語(yǔ)
本文所設(shè)計(jì)的基于" title="基于">基于小波變換視頻應(yīng)變測(cè)量系統(tǒng),精度較高,且具有一定的實(shí)時(shí)性要求,能夠滿足實(shí)際的需要。隨著電子技術(shù)、機(jī)械科學(xué)、光學(xué)和計(jì)算機(jī)科學(xué)技術(shù)[8]的發(fā)展,應(yīng)用于視頻應(yīng)變測(cè)量系統(tǒng)的精密邊緣檢測(cè)技術(shù),將會(huì)有長(zhǎng)遠(yuǎn)的發(fā)展。