
作者:李 娟侯 強(qiáng) 吳題 李云強(qiáng)
0 引言
H.264采用了減少視頻圖像各幀間冗余度的運(yùn)動(dòng)估計(jì)算法。運(yùn)動(dòng)估計(jì)算法傳統(tǒng)的有全搜索(FS)、三步搜索(TSS)、新三步搜索(NTSS)、四步搜索(FSS)等;常用的是鉆石搜索(DS)和非對(duì)稱十字交叉多層次六邊形格點(diǎn)運(yùn)動(dòng)搜索算法(UMHexagonS)。運(yùn)動(dòng)估計(jì)是整個(gè)視頻編碼中運(yùn)算量最大的模塊,可占整個(gè)軟件編碼器運(yùn)算量的70%以上。因此視頻系統(tǒng)中編碼器的復(fù)雜部分取決于運(yùn)動(dòng)估計(jì)算法體系結(jié)構(gòu)的復(fù)雜性。
1 運(yùn)動(dòng)估計(jì)算法分析
1.1 鉆石搜索(DS)算法
DS算法即鉆石搜索算法,被MPEG-4國(guó)際標(biāo)準(zhǔn)采用并收入驗(yàn)證模型VM(Verification Model)中,是MPEG-4建議采用的快速運(yùn)動(dòng)估計(jì)算法。 DS算法采用了兩種搜索模板,分別是有9個(gè)檢測(cè)點(diǎn)的大模板和有5個(gè)檢測(cè)點(diǎn)的小模板。搜索時(shí)先用大模板LDSP在搜索區(qū)域中心及周圍8個(gè)點(diǎn)處進(jìn)行匹配計(jì)算,當(dāng)最小塊誤差出現(xiàn)在中心點(diǎn)處時(shí),將大模板LDSP換為SDSP,再進(jìn)行匹配計(jì)算,這時(shí)5個(gè)點(diǎn)中的MBD(Minimum Block Distortion)即為最優(yōu)匹配點(diǎn);否則,改變中心位置,仍用LDSP重復(fù)計(jì)算。
1.2 菱形十字搜索(DCS)算法
菱形十字搜索算法(DCS)算法是在DS算法基礎(chǔ)上改進(jìn)而來(lái),DCS的匹配模板是建立在兩種不同的搜索模板之上的,即大菱形十字型(LDCSP)和小菱形十字型(SDCSP),如圖1所示。其中,十字型可以對(duì)應(yīng)于實(shí)際的運(yùn)動(dòng)的矢量分布,而交叉型則是為了加速搜索效果。

DCS算法在進(jìn)行運(yùn)動(dòng)估計(jì)匹配運(yùn)算時(shí),有三種可能的情況:
(1)若MBD點(diǎn)位于LDCSP中心位置,說(shuō)明圖像是靜止的,DCS算法一步結(jié)束;
(2)若MBD點(diǎn)位于LDCSP小十字位置,說(shuō)明圖像的運(yùn)動(dòng)較小,則在此基礎(chǔ)上按照SDCSP模板反復(fù)進(jìn)行交叉搜索。
(3)若MBD點(diǎn)位于LDCSP大十字位置,說(shuō)明圖像的運(yùn)動(dòng)較大,則在此基礎(chǔ)上按照LDCSP模板反復(fù)進(jìn)行交叉搜索。
由此可以看出,DCS算法的優(yōu)點(diǎn)是,可以根據(jù)圖像的運(yùn)動(dòng)類型(如上述三種情況),白適應(yīng)選擇下一步相應(yīng)的搜索模板,使搜索與圖像內(nèi)容有關(guān)(基于內(nèi)容的搜索),從而得到較好的搜索效果;DCS算法的搜索并不一定要經(jīng)歷模板由大到小的必然過(guò)程,有時(shí)一步即可完成搜索;用DCS搜索時(shí),十字形模板對(duì)應(yīng)于實(shí)際的運(yùn)動(dòng)矢量分布,交叉形模板則有準(zhǔn)確性“聚焦”特性,這從本質(zhì)上體現(xiàn)了DCS是粗定位和準(zhǔn)確定位的有效結(jié)合。 function ImgZoom(Id)//重新設(shè)置圖片大小 防止撐破表格 { var w = $(Id).width; var m = 650; if(w
2 運(yùn)動(dòng)估計(jì)的閾值確定
視頻圖像的運(yùn)動(dòng)矢量大部分為零矢量或運(yùn)動(dòng)很小的矢量。運(yùn)動(dòng)矢量為零的塊稱為靜止塊;運(yùn)動(dòng)矢量很小的塊(以搜索窗口中心為圓心,兩像素為半徑的圓內(nèi))稱為準(zhǔn)靜止塊:而其他的稱為運(yùn)動(dòng)塊。如果有超過(guò)80%運(yùn)動(dòng)矢量很小的塊可被看作靜止或準(zhǔn)靜止塊。因此,可設(shè)一個(gè)閥值T,當(dāng)運(yùn)動(dòng)矢量的值小于T時(shí),可用SDCSP搜索法直接進(jìn)行精確定位,找出最優(yōu)點(diǎn);當(dāng)運(yùn)動(dòng)矢量的值大于T時(shí),可用LDCSP搜索算法找出最優(yōu)點(diǎn)。
運(yùn)動(dòng)矢量空間域的預(yù)測(cè)方式有運(yùn)動(dòng)矢量中值預(yù)測(cè)、空間域的上層塊模式運(yùn)動(dòng)矢量;在時(shí)間域的預(yù)測(cè)方式有前幀對(duì)應(yīng)塊運(yùn)動(dòng)矢量預(yù)測(cè)和時(shí)間域的鄰近參考幀運(yùn)動(dòng)矢量預(yù)測(cè)。本文采用運(yùn)動(dòng)矢量中值預(yù)測(cè)方式。根據(jù)與當(dāng)前E塊相鄰的左邊A塊,上邊B塊和右上邊C塊的運(yùn)動(dòng)矢量,取中值作為當(dāng)前塊的預(yù)測(cè)運(yùn)動(dòng)矢量。如圖2所示。
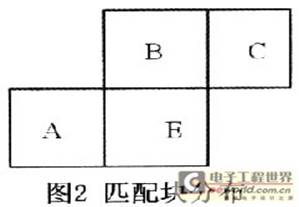
設(shè)當(dāng)前要編碼塊E的運(yùn)動(dòng)矢量為MVp。如果運(yùn)動(dòng)矢量的值MVp≥T,則與E塊相鄰的各塊間運(yùn)動(dòng)的相關(guān)性較高,表明該區(qū)域的變化比較平緩;如果運(yùn)動(dòng)矢量的值MVp
3 自適應(yīng)運(yùn)動(dòng)估計(jì)算法
結(jié)合上述DCS算法和閾值的確定,可采取先對(duì)視頻圖像的運(yùn)動(dòng)塊進(jìn)行閾值的判斷,再根據(jù)判斷結(jié)果進(jìn)行最佳匹配塊的搜索。具體搜索步驟描述如下:
Step 1:判斷當(dāng)前塊運(yùn)動(dòng)矢量MVp和閾值確大小。若MVp≥T,則進(jìn)入Step 2;若MVp
Step 2:用LDCSP在搜索區(qū)域中心及周圍8個(gè)點(diǎn)進(jìn)行匹配運(yùn)算,然后判斷,找出MBD點(diǎn)。若MBD點(diǎn)位于中心點(diǎn),說(shuō)明宏塊是靜止的,DCS算法一步結(jié)束,得到最優(yōu)匹配塊;否則進(jìn)行Step 3。
Step 3:若MBD點(diǎn)為L(zhǎng)DCSP模版的小十字處,以該點(diǎn)為中心構(gòu)建SDCSP進(jìn)行匹配計(jì)算,若MBD點(diǎn)位于中心點(diǎn),所得MBD點(diǎn)為所求。否則,進(jìn)入Step 4。
Step 4:若MBD點(diǎn)為L(zhǎng)DCSP模版的大十字處,以該點(diǎn)為中心構(gòu)建LCSP進(jìn)行匹配計(jì)算,進(jìn)入step 2。
Step 5:用LDCSP在搜索區(qū)域中心及周圍5個(gè)點(diǎn)進(jìn)行匹配運(yùn)算,然后判斷,找出MBD點(diǎn)。若MBD點(diǎn)位于中心點(diǎn),所得MBD點(diǎn)為所求;否則繼續(xù)Step 5。
算法流程圖如圖3所示
 function ImgZoom(Id)//重新設(shè)置圖片大小 防止撐破表格 { var w = $(Id).width; var m = 650; if(w
function ImgZoom(Id)//重新設(shè)置圖片大小 防止撐破表格 { var w = $(Id).width; var m = 650; if(w
4 實(shí)驗(yàn)結(jié)果及說(shuō)明
用搜索時(shí)間和PSNR值兩個(gè)指標(biāo)來(lái)驗(yàn)證DCS的性能。本節(jié)實(shí)驗(yàn)用到的所有視頻文件均為QCIF(Quartet commonintermediate format)格式。實(shí)驗(yàn)以主頻1.8GHz的PC機(jī)上運(yùn)行的VisualC++6.0為平臺(tái)。測(cè)試對(duì)象為:missa、salesman、news、grandmother、foreman、carphone、claire,搜索范圍為16×16的矩形框,量化范圍為2~12,測(cè)試序列中每幀圖像的大小為176×144。
4.1 搜索時(shí)間的比較
為了時(shí)間測(cè)試的準(zhǔn)確性,測(cè)試時(shí)采用的是VC++提供的兩個(gè)精確時(shí)間函數(shù):QueryPerformanceFrequency()和OuerPerformanceCounter()精度對(duì)標(biāo)準(zhǔn)測(cè)試序列missa、salesman、news、grandmother、foreman、carphone進(jìn)行精確測(cè)定,得表1(數(shù)據(jù)均為三次測(cè)量所求得的平均值)。

從表1可知:a.FS搜索效果最佳,但耗時(shí)太長(zhǎng);DS算法有較大改進(jìn),可以實(shí)現(xiàn)實(shí)時(shí)壓縮;DCS比DS,運(yùn)行時(shí)間都有不同程度的減少,故DCS算法在搜索速度有優(yōu)勢(shì)。b.從單個(gè)序列來(lái)看,DCS算法對(duì)missa和salesman時(shí)間優(yōu)化最為顯著,分別只占FS算法的7.42%、7.50%和DS算法的98.17%、97.49%;對(duì)carphone序列的搜索速度也有很大優(yōu)化,占FS搜索算法的7.97%和DS算法的97.82%。綜合視頻特性可知:DCS算法針對(duì)運(yùn)動(dòng)平緩的視頻對(duì)象搜索速度優(yōu)化明顯。
4.2 信噪比的比較
對(duì)標(biāo)準(zhǔn)測(cè)試序列claire和carphone序列進(jìn)行測(cè)定,計(jì)算PSNR得表2。

表2中FS的平均PSNR最高,達(dá)到42.38,但搜索時(shí)間最長(zhǎng);DS的PSNR最低,為42.31,而DCS為42.35,高于DS算法,且僅低于FS算法0.03dB。從單個(gè)序列來(lái)看,DCS算法對(duì)claire的優(yōu)化程度最大,超過(guò)了FS的PSNR值,說(shuō)明DCS算法身體靜止僅面部表情運(yùn)動(dòng)特點(diǎn)視頻適用。用DCS算法計(jì)算得到的carphone的PSNR值雖然低于FS算法,但高于DS算法;missa序列的DCS算法的PSNR值和FS、DS法的相差不大。故DCS算法在搜索速度、圖像質(zhì)量上均有保證。
5 結(jié)束語(yǔ)
本文從搜索時(shí)間和圖像質(zhì)量?jī)煞矫鎸?duì)各種塊匹配運(yùn)動(dòng)估計(jì)算法進(jìn)行了性能分析比較。實(shí)驗(yàn)結(jié)果表明,將菱形十字交叉搜索算法和閾值判斷結(jié)合,在搜索速度方面,有很大程度的優(yōu)化,而且能得到與FS、DS搜索算法相當(dāng)?shù)膱D像質(zhì)量。DCS算法針對(duì)運(yùn)動(dòng)平緩的視頻作用明顯,由此推知該算法適用于電視電話、遠(yuǎn)程教育等實(shí)時(shí)視頻壓縮。