

2.1 溫度檢測與信號放大電路
本系統(tǒng)采用鉑電阻PT100為測溫元件,,PT100具有性能穩(wěn)定,、抗氧化能力強和測量精度高等優(yōu)點。由PT100和電阻元件組成的橋式電路將由于溫度變化引起的鉑電阻的阻值變化轉(zhuǎn)換為電壓信號輸入放大器,。因需通過連接導線將安裝在測量現(xiàn)場的鉑電阻接入控制臺,,為了減小引線電阻的影響,采用三線式接線法,。
信號放大電路由集成運放OP07組成,,OP07的噪聲峰-峰值為0.6μV,共模扼制比CMRR>106dB,,OP07的管腳功能:IN+和IN-為信號差動輸入端,,1、8腳為調(diào)零端,,6腳為輸出端,。
2.2 電壓/頻率轉(zhuǎn)換電路(LM331)
在控制和測量系統(tǒng)中,一般由AD轉(zhuǎn)換器件將電量或非電量通過傳感器和前置電路接入后續(xù)電路處理,。本系統(tǒng)采用V/F轉(zhuǎn)換器LM331將溫度信號的變化轉(zhuǎn)換為頻率信號的處理。
LM331是美國NS公司生產(chǎn)的性能價格比高,、外圍電路簡單,、可單電源供電、低功耗的集成電路,。LM331動態(tài)范圍寬達100dB,,工作頻率低到0.1Hz時尚有較好的線性度,,數(shù)字分辨率達12位。LM331的輸出驅(qū)動器采用集電極開路形式,,因此可通過選擇邏輯電流和外接電阻來靈活改變輸出脈沖的邏輯電平,,以適配TTL、DTL和CMOS等不同邏輯電路,。LM331可工作在4.0V~40V之間,,輸出可高達40V,而且可以防止VCC短路,。
本系統(tǒng)中,,LM331將輸出的頻率信號變成TTL電平送給單片機的P3.4口作為T0的計數(shù)脈沖。該轉(zhuǎn)換電路線性良好,,抗干擾能力強,,輸出范圍在10Hz~10kHz以上,有利于提高系統(tǒng)的測量范圍,。
LM331主要管腳功能:
RC:參考電流輸入端,;CO:電流輸出端;FO:頻率輸出端,;CI:電壓輸入端,。
2.3 CPU及外圍電路
AT89C52是ATMEL公司生產(chǎn)的MCS-51系列單片機,內(nèi)置8K字節(jié)電擦除可編程EEPROM片內(nèi)程序存儲器和256字節(jié)RAM,,片內(nèi)程序存儲器空間能滿足本系統(tǒng)程序存儲之需要,,可省去片外EPROM程序存儲器和地址鎖存器,使電路結(jié)構(gòu)簡捷,。
TXD,、RXD、P1.5,、P1.6分別與MAX487的DI,、RO、![]() ,、DE相聯(lián)進行數(shù)據(jù)通訊控制,,P1.0~P1.4口、RESET接至X25045
,、DE相聯(lián)進行數(shù)據(jù)通訊控制,,P1.0~P1.4口、RESET接至X25045![]()
![]() ALE,、P0口,、P2.0、P2.1接至8155,。P3.4口計數(shù)器T0輸入端接至LM331的頻率輸出端進行脈沖計數(shù),。P1.7口為光耦TIL117控制端。
ALE,、P0口,、P2.0、P2.1接至8155,。P3.4口計數(shù)器T0輸入端接至LM331的頻率輸出端進行脈沖計數(shù),。P1.7口為光耦TIL117控制端。
系統(tǒng)數(shù)據(jù)存儲及故障保護部分由X25045組成,X25045是一種串行通訊的512字節(jié)EEPROM,,同時兼有看門狗和電源監(jiān)控功能,。X25045有三種可編程看門狗周期,上電和VCC低于檢測門限時,,輸出復位信號,,X25045輸出復位高電平有效,其復位輸出端直接與89C52的復位端連接,。
X25045管腳功能:
![]() :片選輸入,;SO:串行輸出;SI:串行輸入,;SCK:串行時鐘輸入,;WP:寫保護輸入;RESET::復位輸出,。
:片選輸入,;SO:串行輸出;SI:串行輸入,;SCK:串行時鐘輸入,;WP:寫保護輸入;RESET::復位輸出,。
2.4 通訊口(MAX487)
本系統(tǒng)采用RS-485接口芯片MAX487作為通訊口,。MAX487是MAXIM公司生產(chǎn)的用于RS-485和RS—422通信的差分總線小功率收發(fā)器,它含有一個驅(qū)動器和一個接收器,,具有驅(qū)動器/接收器使能功能,,輸入阻抗為1/4負載(≥48kW),節(jié)點數(shù)為128,,即每個MAX487的驅(qū)動器可驅(qū)動128個標準負載,。MAX487的驅(qū)動器設(shè)計成限斜率方式,使輸出信號邊沿不至于過陡,,以避免在傳輸線產(chǎn)生過多的高頻分量,,從而有效扼制了干擾現(xiàn)象。MAX487的接收靈敏度為±200MV,,即接收端的差分電壓≥+200MV時,,接收器輸出為高電平,≤-200MV時接收器輸出為低電平,,介于±200MV之間時接收器輸出為不確定狀態(tài),,因此,一旦某個節(jié)點的接收器在總線空閑,、傳輸線開路或短路時產(chǎn)生低電平,,將使串行接收器找不到起始位,從而引起通信異常,,為此,,本系統(tǒng)在硬件上作了處理:將MAX487的A、B輸出端加接上拉,、下拉電阻,,保證在發(fā)出有效數(shù)據(jù)時所有接收器能接收到完整的數(shù)據(jù),。
MAX487的數(shù)據(jù)傳輸速率為0.25Mbps,靜態(tài)工作電流為120μA,,5V單電源工作,在本系統(tǒng)中,,MAX487采用半雙工通信方式,,各節(jié)點間的通信通過一對雙絞線作為傳輸介質(zhì),因雙絞線的特性阻抗為120Ω,,因此系統(tǒng)在MAX487的始端和末端各接一個120Ω電阻以減少線路上傳輸信號的反射,。由于主機與分機相隔較遠,而分機系統(tǒng)上電或復位又常常不在同一時刻完成,,如在此時某個MAX487處于發(fā)送狀態(tài),,將占用通信總線而使其它分機無法與主機進行通信,本系統(tǒng)在89C52的P1.6口與MAX487的DE端之間加接光耦TIL117,,保證了系統(tǒng)上電復位時MAX487的DE端為“0”,,有效解決了這個問題。
MAX487主要管腳功能:
RO:接收器輸出端,;![]() :接收器輸出使能端,,
:接收器輸出使能端,,![]() 為“0”時RO被使能;DE:驅(qū)動器輸出使能端,;DI:驅(qū)動器輸入端,;A:接收器同相輸入端和驅(qū)動器同相輸出端;B:接收器反相輸入端和驅(qū)動器反相輸出端,。
為“0”時RO被使能;DE:驅(qū)動器輸出使能端,;DI:驅(qū)動器輸入端,;A:接收器同相輸入端和驅(qū)動器同相輸出端;B:接收器反相輸入端和驅(qū)動器反相輸出端,。
3 控制軟件的設(shè)計
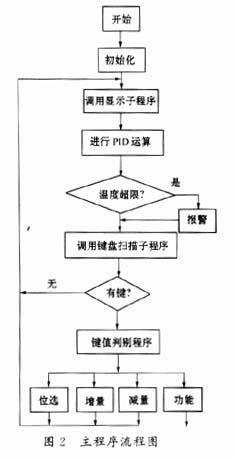
該系統(tǒng)軟件采用模塊化設(shè)計,,由主程序和子程序及中斷服務(wù)程序組成。主程序流程圖如圖2所示,,主要子程序包括:顯示子程序,;鍵盤掃描子程序;PID運算子程序,。限于篇幅,,具體程序略。
4 結(jié)束語
該智能溫控表測量精度高,,性能穩(wěn)定可靠,,不但可以取代老式的溫控表,還可以實現(xiàn)計算機網(wǎng)絡(luò)高效數(shù)據(jù)管理,,是現(xiàn)代工業(yè)控制領(lǐng)域中實用的智能化儀表,。