
1總體設(shè)計(jì)原理
懸浮軸振動(dòng)測(cè)量傳感器的設(shè)計(jì)包括電容傳感器的設(shè)計(jì)、振蕩電路的選取、光電編碼器的采樣、差頻計(jì)數(shù)的實(shí)現(xiàn)、單片機(jī)智能控制幾大部分。其基本原理是:首先,利用導(dǎo)電介質(zhì)電容傳感器將振動(dòng)位移的變化轉(zhuǎn)換為電容量的變化,由于電容傳感器為振蕩電路中的電容元件,因而,電容量的變化會(huì)引起振蕩器輸出頻率的變化。同時(shí),選擇另一只電容傳感器作為溫度補(bǔ)償傳感器,通過振蕩器同樣得到一個(gè)頻率信號(hào)。振動(dòng)信號(hào)的采樣是由光電編碼器的等轉(zhuǎn)角取樣實(shí)現(xiàn)的,在光電編碼器、門電路及單片機(jī)硬軟件的配合下,將2個(gè)高頻信號(hào)輸入差頻計(jì)數(shù)器就能得到固定時(shí)間間隔內(nèi)的計(jì)數(shù)值,送C8051F020單片機(jī)進(jìn)行存儲(chǔ)和處理,得到計(jì)數(shù)差值并轉(zhuǎn)換成振動(dòng)位移的大小,實(shí)現(xiàn)框圖如圖1所示。

2傳感器的研制
2.1測(cè)量電路
懸浮軸的振動(dòng)位移測(cè)量電路由兩部分組成:一方面利用導(dǎo)電介質(zhì)電容傳感器將懸浮軸振動(dòng)位移的變化轉(zhuǎn)換成電容量的變化;另一方面,利用反射式光電編碼器實(shí)現(xiàn)懸浮軸轉(zhuǎn)動(dòng)的等角度采樣,保證采樣的精度。
2.1.1導(dǎo)電介質(zhì)電容傳感器的設(shè)計(jì)
利用改變電容極板面積S和極板之間距離d的方法,均可以達(dá)到改變電容量C的目的。選用變極距式電容傳感器實(shí)現(xiàn)對(duì)懸浮軸的振動(dòng)位移測(cè)量。為使傳感器能將振動(dòng)位移的變化轉(zhuǎn)換成相應(yīng)的電容量變化,使兩者成單值函數(shù)關(guān)系,并保證懸浮軸在轉(zhuǎn)動(dòng)和受外界干擾時(shí)的真實(shí)運(yùn)動(dòng)狀況不發(fā)生改變,導(dǎo)電介質(zhì)傳感器以懸浮軸本身作為電容器的動(dòng)極板,采用溫度對(duì)材料膨脹系數(shù)影響小的銅作為靜極板。另外,設(shè)計(jì)時(shí)對(duì)電容傳感器的靈敏度、線性及寄生電容的影響也給予充分考慮。設(shè)計(jì)時(shí)采用2只電容傳感器:1只用于測(cè)量,1只用于溫度補(bǔ)償。而且,每只電容傳感器又都是2只電容器串聯(lián)組成的,這樣,既解決了電容傳感器導(dǎo)線的連接問題,又減少了寄生電容的影響。設(shè)用于測(cè)量的電容傳感器電容量為C,用于溫度補(bǔ)償?shù)碾娙輦鞲衅麟娙萘繛镃0,設(shè)計(jì)的具體參數(shù)如下:
2只電容器的初始安裝極板間距均為x0=25μm;絕緣材料的厚度d1=10μm;每個(gè)極板的覆蓋面積A=0.5 cm2;測(cè)量振動(dòng)的范圍為-25~25μm(即極板間距z范圍為0~50μm);ε0=8.85×10-12 F/m,εr=2.3ε0,其結(jié)構(gòu)簡(jiǎn)圖如圖2所示。

首先,極板間距和振動(dòng)位移△x的關(guān)系為
x-x0=△x (1)
由于每只電容傳感器均由2只電容串聯(lián)構(gòu)成,考慮極板表面絕緣膜厚度,得到測(cè)量電容傳感器的電容量C和溫度補(bǔ)償電容傳感器的電容量C0分別為

2.1.2利用光電編碼器實(shí)現(xiàn)等轉(zhuǎn)角采樣
光電脈沖編碼器是一種旋轉(zhuǎn)式脈沖發(fā)生器,它將機(jī)械轉(zhuǎn)角變成電脈沖,可作為位置檢測(cè)和速度檢測(cè)裝置。設(shè)計(jì)中利用反射式光電編碼器實(shí)現(xiàn)了高精度的等轉(zhuǎn)角采樣,其輸出為脈沖信號(hào),脈沖個(gè)數(shù)與旋轉(zhuǎn)位移有關(guān)。懸浮軸的轉(zhuǎn)速是50 rad/s,光電編碼器采用等轉(zhuǎn)角(2°)間隔采樣,則每個(gè)采樣周期約為t=111μs,即光電編碼器輸出頻率為9kHz的脈沖信號(hào)。懸浮軸連續(xù)變化的振動(dòng)信號(hào)轉(zhuǎn)換過程為連續(xù)信號(hào)→離散信號(hào),根據(jù)信號(hào)采樣理論:若連續(xù)信號(hào)f(t)是有限帶寬的,其頻譜的最高頻率為fm,則信號(hào)f(t)可以用等間隔的抽樣值來唯一的表示,而最低抽樣頻率fs=2fm,即fs≥2fm。由于光電編碼器的抽樣頻率fs=9kHz,因此,傳感器能夠測(cè)得的懸浮軸振動(dòng)的最高頻率fm<4.5 kHz。
2.2信號(hào)處理電路
振蕩器、差頻計(jì)數(shù)器、控制電路、單片機(jī)共同組成信號(hào)處理系統(tǒng)。利用懸浮軸的振動(dòng)位移與頻率信號(hào)存在的函數(shù)關(guān)系,將傳感器測(cè)量結(jié)果通過專門設(shè)計(jì)的振蕩電路轉(zhuǎn)換為頻率信號(hào),利用差頻計(jì)數(shù)器進(jìn)行控制計(jì)數(shù),再經(jīng)單片機(jī)處理,最終得到懸浮軸振動(dòng)位移的大小。
2.2.1振蕩電路的選取
電容傳感器輸出的電容變化量通過振蕩器轉(zhuǎn)換成便于測(cè)量的頻率值,而且,要求電容量在幾十pF的情況下,振蕩器能輸出高達(dá)30 MHz的振蕩頻率,可以采用非對(duì)稱式振蕩電路,它的結(jié)構(gòu)如圖3所示。
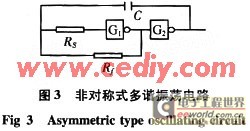
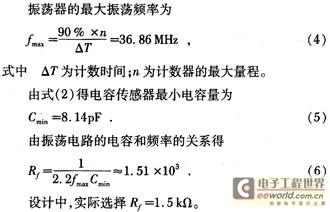
其中,反相器G1,G2選擇了74HC04芯片(六反相器)。RS是保護(hù)電阻,經(jīng)過硬件電路的調(diào)試,得到RS=20.3 kΩ。Rf是反饋電阻,也是整個(gè)振蕩電路的延時(shí)環(huán)節(jié),它的阻值大小直接影響到振蕩頻率的大小,因此,要合理確定反饋電阻參數(shù)Rf。由于電容傳感器極板間距與振蕩頻率的關(guān)系是:極板間距越大,振蕩器的振蕩頻率越高,計(jì)數(shù)器的計(jì)數(shù)值越大。為了保證測(cè)量結(jié)果的精確性,當(dāng)極板間距最大時(shí),計(jì)數(shù)器的計(jì)數(shù)值應(yīng)該達(dá)到滿量程的90%左右。本設(shè)計(jì)采用串行輸入/12位并行輸出的差頻計(jì)數(shù)器,它的計(jì)數(shù)范圍為0~212,計(jì)數(shù)時(shí)間△T應(yīng)略小于采樣周期取100μs,則Rf的參數(shù)確定過程如下:
2.2.2差頻計(jì)數(shù)的實(shí)現(xiàn)
差頻計(jì)數(shù)器采用頻率計(jì)數(shù)的方法,外部晶體振蕩器通過門控電路得到采樣基準(zhǔn)信號(hào)和計(jì)數(shù)復(fù)位信號(hào),在采樣基準(zhǔn)信號(hào)上升沿來后計(jì)數(shù)器計(jì)數(shù)使能,計(jì)數(shù)模塊開始對(duì)輸入的頻率信號(hào)進(jìn)行計(jì)數(shù),計(jì)數(shù)時(shí)間恰為△T,計(jì)數(shù)復(fù)位信號(hào)用于每一次測(cè)量開始時(shí)對(duì)計(jì)數(shù)模塊進(jìn)行復(fù)位,在計(jì)數(shù)復(fù)位信號(hào)的上升沿將采樣的數(shù)據(jù)結(jié)果鎖存,并清除上次測(cè)量的結(jié)果。計(jì)數(shù)時(shí)一方面考慮到電容傳感器的溫度補(bǔ)償,采用了2個(gè)計(jì)數(shù)器差頻計(jì)數(shù)的方式;另一方面,計(jì)數(shù)器本身由于采樣時(shí)間和計(jì)數(shù)脈沖的不同步性存在±1的計(jì)數(shù)誤差,加上差頻計(jì)數(shù)器由2個(gè)計(jì)數(shù)器構(gòu)成,更增大了計(jì)數(shù)誤差,因此,關(guān)鍵是消除這部分誤差的影響。 假設(shè)兩電容傳感器的容量C,C0經(jīng)振蕩器輸出的頻率信號(hào)分別對(duì)應(yīng)為f,f0,即
f=f(D)+f(t), (7)
f0=f(t), (8)
式中f(D)為振動(dòng)位移引起的頻率變化;f(t)為環(huán)境溫度引起的頻率變化。
這樣,通過差頻計(jì)數(shù)器的差頻輸出能消除環(huán)境溫度對(duì)測(cè)量結(jié)果的影響
Δf=f-f0=f(D) (9)
差頻計(jì)數(shù)器的工作原理是在計(jì)數(shù)時(shí)間△T內(nèi)分別對(duì)2個(gè)頻率信號(hào)進(jìn)行計(jì)數(shù),測(cè)得的脈沖個(gè)數(shù)分別為n,n0,則有
n-n0=(f-f0)△T, (10)
式中n-n0為兩計(jì)數(shù)器的差值。
由此,只要獲得合理的計(jì)數(shù)時(shí)間△T,就可以得到2個(gè)頻率信號(hào)的計(jì)數(shù)差值,設(shè)計(jì)時(shí),△T是利用單片機(jī)計(jì)數(shù)光電編碼器的輸出脈沖確定的。由于光電編碼器采樣的時(shí)間間隔約為111μs,一個(gè)采樣周期內(nèi)除了計(jì)數(shù)外,必須留有計(jì)數(shù)值的記錄和運(yùn)算時(shí)間,所以,選取ΔT=100μs<111μs,由式(10)可知計(jì)數(shù)器的讀數(shù)差值與頻率的關(guān)系為
![]()
差頻計(jì)數(shù)器的啟停信號(hào)是由單片機(jī)控制的。當(dāng)單片機(jī)啟動(dòng)控制信號(hào)GEP為高電平后,差頻計(jì)數(shù)器開始等待計(jì)數(shù)。差頻計(jì)數(shù)器的被測(cè)頻率信號(hào)是由2個(gè)與門控制輸入的。在每個(gè)采樣周期到來時(shí)即單片機(jī)接收光電編碼器脈沖e1為上升沿后,單片機(jī)分別檢測(cè)2個(gè)振蕩器的輸出頻率信號(hào)osc11,osc21,等待osc11,osc21信號(hào)的第一個(gè)上升沿,分別發(fā)出控制信號(hào)f1,f2啟動(dòng)與門,使差頻計(jì)數(shù)器接收對(duì)應(yīng)的頻率信號(hào)并進(jìn)行計(jì)數(shù),同時(shí),單片機(jī)對(duì)應(yīng)的內(nèi)部計(jì)數(shù)器開始定時(shí),定時(shí)時(shí)間為△T。定時(shí)時(shí)間到△T后,單片機(jī)關(guān)閉差頻計(jì)數(shù)器的對(duì)應(yīng)輸入信號(hào)的閘門,讀取差頻計(jì)數(shù)器的計(jì)數(shù)值,并對(duì)計(jì)數(shù)器進(jìn)行清零處理,當(dāng)2個(gè)計(jì)數(shù)器均完成計(jì)數(shù)后,單片機(jī)開始對(duì)D1,D2進(jìn)行數(shù)字處理。差頻計(jì)數(shù)器被測(cè)頻率信號(hào)與定時(shí)控制信號(hào)之間采用了同步鎖定的方法,并分別對(duì)2個(gè)頻率信號(hào)計(jì)數(shù),這樣就消除±1的計(jì)數(shù)誤差。振蕩器輸出為高頻信號(hào),因此,一個(gè)采樣周期內(nèi)2個(gè)頻率信號(hào)第一個(gè)上升沿到來的時(shí)間間隔不會(huì)大,即每個(gè)采樣周期內(nèi)都能完成對(duì)2個(gè)頻率信號(hào)的ΔT間隔計(jì)數(shù),周而復(fù)始就實(shí)現(xiàn)了整個(gè)差頻計(jì)數(shù)的功能。差頻計(jì)數(shù)器的工作時(shí)序如圖4。圖中,1為單片機(jī)的啟停控制信號(hào)CEP,2為編碼器的輸出信號(hào)e1,3為測(cè)量傳感器的頻率信號(hào)osc11,4為與門1的控制信號(hào)f1,5為被計(jì)數(shù)器1計(jì)數(shù)的頻率信號(hào)osc12,6為溫度補(bǔ)償傳感器的頻率信號(hào)osc21,7為與門2的控制信號(hào)f2,8為被計(jì)數(shù)器2計(jì)數(shù)的頻率信號(hào)osc22。

2.2.3數(shù)據(jù)的處理
由于懸浮軸振動(dòng)位移與單片機(jī)輸出計(jì)數(shù)值成單值函數(shù)關(guān)系,最后,利用C8051F020單片機(jī)編寫軟件程序把計(jì)數(shù)差值轉(zhuǎn)換成振動(dòng)的位移量實(shí)現(xiàn)振動(dòng)位移的存儲(chǔ)和分析。其中,振動(dòng)位移分別用2個(gè)字節(jié)進(jìn)行存儲(chǔ),振動(dòng)位移的正負(fù)根據(jù)減法器的進(jìn)位位確定,它存儲(chǔ)在一個(gè)獨(dú)立的單元中,設(shè)定00H表示振動(dòng)為正,01H表示振動(dòng)位移為負(fù)。
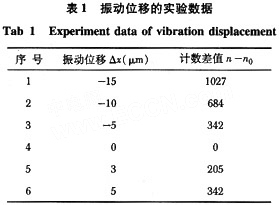
綜合式(2)、式(3)、式(6)、式(11)可以推導(dǎo)計(jì)算出振動(dòng)位移與計(jì)數(shù)器的差值之間的關(guān)系如表1。
3結(jié)束語(yǔ)
懸浮軸振動(dòng)測(cè)量傳感器能夠測(cè)量振動(dòng)頻率小于4.5 kHz,振動(dòng)范圍在-25~25 μm內(nèi)的振動(dòng)位移量,實(shí)現(xiàn)了轉(zhuǎn)動(dòng)時(shí)對(duì)其振動(dòng)位移的測(cè)量,同時(shí),避免了對(duì)本身運(yùn)動(dòng)規(guī)律的干擾,而且,硬件采用差頻測(cè)量、光電編碼器控制等角度采樣,結(jié)合軟件的數(shù)據(jù)處理,在很大程度上提高了測(cè)量精度,消除了傳感器調(diào)理電路電源波動(dòng)、環(huán)境溫度變化、分布電容的影響,還能屏蔽電磁干擾,保證了測(cè)量結(jié)果的可靠性,可應(yīng)用在特殊的測(cè)控環(huán)境中。