
引言
PID控制作為一種經(jīng)典控制算法,具有結(jié)構(gòu)簡單、易于調(diào)試、動態(tài)響應(yīng)特性快、魯棒性強等特點。但是,對于中、低頻周期信號,該算法仍無法實現(xiàn)無靜差控制;對由非線性負載引起的輸出波形畸變的調(diào)節(jié)能力也較差。
本文介紹了一種PID控制器與重復(fù)控制" title="重復(fù)控制">重復(fù)控制器采用串聯(lián)拓撲結(jié)構(gòu)的方案,將穩(wěn)定的PID+控制對象閉環(huán)系統(tǒng)" title="閉環(huán)系統(tǒng)">閉環(huán)系統(tǒng)作為重復(fù)控制器的控制對象,在保證系統(tǒng)穩(wěn)態(tài)誤差和動態(tài)性能的同時,簡化了重復(fù)控制器的設(shè)計。
1逆變器模型
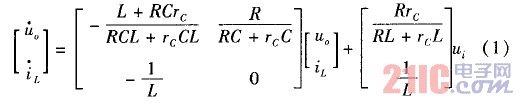
式中,u0為輸出電壓;i為電感電流;為負載電阻;C為濾波器電容;£為電容等效串聯(lián)電阻:
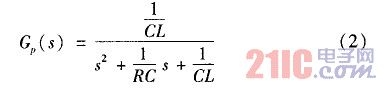

取采樣頻率和開關(guān)頻率相等,把逆變橋看作一個零階保持器,將式(2)離散化可得對象的脈沖傳遞函數(shù)" title="傳遞函數(shù)">傳遞函數(shù)為:

2PID控制器設(shè)計
圖2所示為PID控制系統(tǒng)" title="控制系統(tǒng)">控制系統(tǒng)的開環(huán)頻率特性圖(Bode圖)。其中,G0為被控對象;G為PID控制器;G=Gp×G0
按照傳統(tǒng)PID設(shè)計理論,首先設(shè)開環(huán)系數(shù)為K=200,目的是提高系統(tǒng)低頻增益,減小穩(wěn)態(tài)誤差。但是K值過大會降低系統(tǒng)穩(wěn)定性,所以在低頻段處加一零點,與積分環(huán)節(jié)構(gòu)成滯后校正。該滯后環(huán)節(jié)的作用主要有兩條:一是在保證系統(tǒng)暫態(tài)性能基本不變的情況下,提高系統(tǒng)低頻響應(yīng)的增益,減小系統(tǒng)的穩(wěn)態(tài)誤差;二是利用其低通濾波特性衰減系統(tǒng)高頻響應(yīng)增益,提高系統(tǒng)的相角裕度,以改善系統(tǒng)的穩(wěn)定性。

在中頻段60處加一零點,同時在高頻段處加一極點,由此構(gòu)成超前校正。其作用主要有兩條:一是利用相角超前特性增大系統(tǒng)的相角裕度,提高系統(tǒng)的截止頻率,保證系統(tǒng)快速的動態(tài)響應(yīng);二是衰減系統(tǒng)高頻響應(yīng)增益,抑制高頻噪聲,提高系統(tǒng)魯棒性。
圖2中G為PID控制系統(tǒng)開環(huán)傳遞函數(shù),由其頻率特性曲線可以看到,系統(tǒng)低頻開環(huán)增益" title="開環(huán)增益">開環(huán)增益非常大;截止頻率附近頻段相角裕度增大;高頻段開環(huán)增益很小,抑制了高頻干擾信號。通過滯后一超前相校正方法對PID控制器進行設(shè)計,達到了預(yù)期的目的。經(jīng)過以上分析,PID傳遞函數(shù)為:

取采樣頻率和開關(guān)頻率相等,采用零階保持器將式(4)離散化可得對象的脈沖傳遞函數(shù):

3重復(fù)控制器設(shè)計
根據(jù)內(nèi)模原理,在閉環(huán)系統(tǒng)中加入外部周期信號動態(tài)模型,則系統(tǒng)可以達到對外部周期信號漸近跟蹤的目的,重復(fù)控制策略正是基于這一原理。圖3為基本重復(fù)控制器系統(tǒng)結(jié)構(gòu)圖,其中重復(fù)控制器離散表達式為:
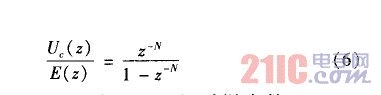
式中,Ⅳ為每基波周期對輸出電壓的采樣次數(shù)。
由式(6)可知,當(dāng)頻率為∞=2~k/T(K=0,1,2,……,T為基波周期),由于z=1,所以若在閉環(huán)系統(tǒng)中嵌入重復(fù)控制器,將使開環(huán)增益趨向無窮大。在這種情況下,非諧波輸入信號將被強烈衰減,達到精確跟蹤輸入信號的目的。但是,由于無法精確知道控制對象動態(tài)特性,所以開環(huán)增益趨向無窮大將惡化閉環(huán)系統(tǒng)的穩(wěn)定性。為了保證系統(tǒng)穩(wěn)定性,需對基本重復(fù)控制系統(tǒng)改進。

本方案提出的復(fù)合重復(fù)控制系統(tǒng)結(jié)構(gòu)圖如圖4所示。
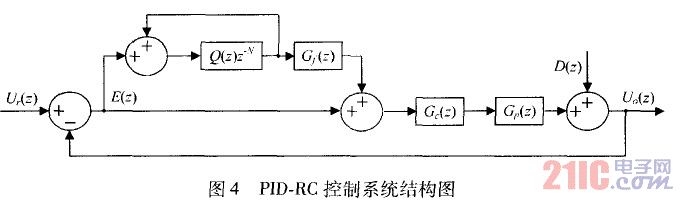
Q(z)、G,(。)為低通濾波補償器" title="補償器">補償器,是重復(fù)控制器設(shè)計工作的重點。P()的作用是將開環(huán)增益調(diào)節(jié)至很大的有限值,在不影響穩(wěn)態(tài)精度的前提下保證系統(tǒng)穩(wěn)定性;G,()的作用是通過限制重復(fù)控制器的頻帶范圍來提高系統(tǒng)的魯棒性。由圖可得到系統(tǒng)的誤差傳遞函數(shù)為:

式中,

根據(jù)小增益定理,上述系統(tǒng)穩(wěn)定的條件是:
①閉環(huán)系統(tǒng)G()是穩(wěn)定的。
②
由誤差傳遞函數(shù)式(7)可知,如果:

則式(7)可重列為:

如果通過構(gòu)造Q(z),在頻率∞=2,rrk/T(k=0,1,2,……)處使:

則可以得到E(z):0。所以,當(dāng)系統(tǒng)滿足式(10),式(12)時,各階諧波的穩(wěn)態(tài)誤差理論上將趨向零。但是,由于實際的系統(tǒng)為非理想系統(tǒng),上述設(shè)計要求無法滿足所有頻段的諧波,通常是在一定頻率范圍內(nèi),根據(jù)穩(wěn)定性條件式(8)、式(9)和控制器條件式(10),式(12)設(shè)計重復(fù)控制器,滿足系統(tǒng)對穩(wěn)態(tài)和動態(tài)的要求。
根據(jù)式(8)、式(10),補償器G,()可以直接設(shè)計為G()的逆函數(shù)。但是,如果G(z)是非最小相位系統(tǒng),雖然式(10)仍成立,外部表現(xiàn)穩(wěn)定,由于有不穩(wěn)定零極點對消情況,這將導(dǎo)致系統(tǒng)內(nèi)部不穩(wěn)定。這種情況下,必須采用其他類型的補償器對G,()進行設(shè)計。
本文中提出的方案,控制對象是PID控制器鎮(zhèn)定的穩(wěn)定閉環(huán)系統(tǒng),其本身即為最小相位系統(tǒng),所以可以直接使用逆函數(shù)設(shè)計補償器,即:

式(12)理論上要求p(z)=1;然而式(9)表明,由于高頻段G(z)趨向0,Q(z)在高頻段應(yīng)小于1,所以Q(z)應(yīng)是一個具有零相移的低通濾波器,其表達式為:

實際應(yīng)用中,采用一階低通濾波器完全可以滿足系統(tǒng)要求:

通過以上分析,現(xiàn)在重復(fù)控制器的兩個濾波器可以根據(jù)式(13)、式(15)設(shè)計。
為了進一步理解重復(fù)控制器在系統(tǒng)中的作用,可以比較嵌入重復(fù)控制器和沒有嵌入兩種情況下的系統(tǒng)開環(huán)頻率特性,如圖5所示。
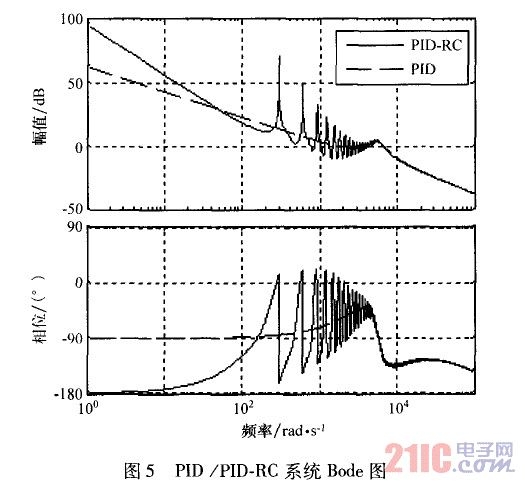
在高頻段,開環(huán)增益變得非常小,這對抑制高頻噪聲,提高系統(tǒng)穩(wěn)定性和魯棒性是非常有幫助的。但是,在非諧波頻率處,沒有嵌入重復(fù)控制器的系統(tǒng)開環(huán)增益更大一些,這說明重復(fù)控制器對位于該頻率的信號控制效果較差。因此,PID控制器在系統(tǒng)中除了有提高系統(tǒng)動態(tài)響應(yīng)速度的作用外,還要調(diào)節(jié)非諧波信號,彌補重復(fù)控制器的不足。
4仿真實驗分析
根據(jù)以上分析,筆者對數(shù)字PID控制、重復(fù)控制以及提出的復(fù)合控制進行了仿真實驗。系統(tǒng)參數(shù)如下:
輸入直流電壓為270V,輸出交流電壓為110V/50Hz,開關(guān)頻率為10kHz,輸出濾波電感為1.5mH,輸出濾波電容為20F,負載電阻為10n。
圖6,圖7中,為給定電壓;Uo為輸出電壓。

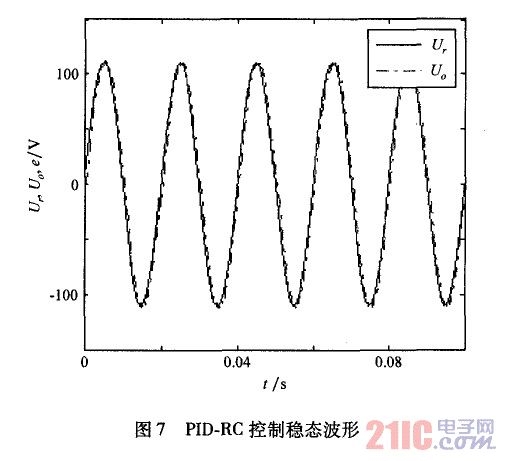
PID控制對于周期性信號無法做到無差跟蹤,存在周期性穩(wěn)態(tài)誤差。嵌人了重復(fù)控制器的系統(tǒng),輸出能夠很好地跟蹤輸入信號,系統(tǒng)迅速進入穩(wěn)態(tài),表現(xiàn)出良好的動態(tài)性能。
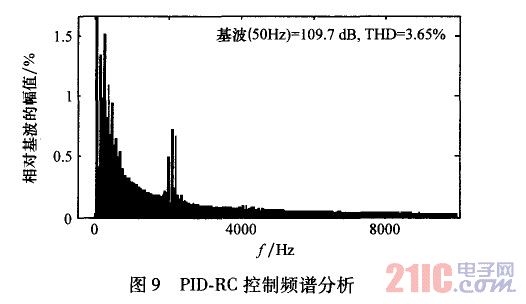
圖8,圖9為系統(tǒng)輸出電壓波形的頻譜分析。圖中直觀地反映出重復(fù)控制可以有效地抑制諧波,降低輸出波形的畸變率。

5結(jié)語
上述過程較為詳細地分析了重復(fù)控制器的工作原理,結(jié)合PID控制和重復(fù)控制各自的優(yōu)缺點,設(shè)計了具有串聯(lián)拓撲結(jié)構(gòu)的復(fù)合控制器,同時發(fā)揮了重復(fù)控制器對周期信號無差跟蹤能力和PID控制器對突變干擾的快速響應(yīng)能力。仿真實驗結(jié)果證明,重復(fù)控制對削減輸出波形畸變是有效的,基于PID控制和重復(fù)控制的復(fù)合控制策略是一種實用的正弦波逆變器控制方案。