
O 引言
無刷直流電機因其體積小,,重量輕,維護方便,,高效節(jié)能等一系列優(yōu)點,被廣泛用于各個領(lǐng)域,。尤其隨著高性能的單片機和專門用途的DSP(Digital Signal Processor)微處理器和集IGBT模塊及其驅(qū)動和保護于一身的智能功率模塊(Intelligent Power Module,,IPM)的發(fā)展,使無刷直流電機的位置檢測和換相更加準(zhǔn)確穩(wěn)定,。本文以DSP(TMS320LF2407A)作為核心的三相無刷直流電機控制系統(tǒng)為研究對象,,采用雙極性PWM(PulseWidth Modulation)控制技術(shù),利用智能功率模塊IPM(PM50RSAl20),,設(shè)計一種電機控制系統(tǒng),,實驗結(jié)果表明,系統(tǒng)調(diào)速范圍寬,,控制性能良好,。
1 三相無刷直流電機控制系統(tǒng)
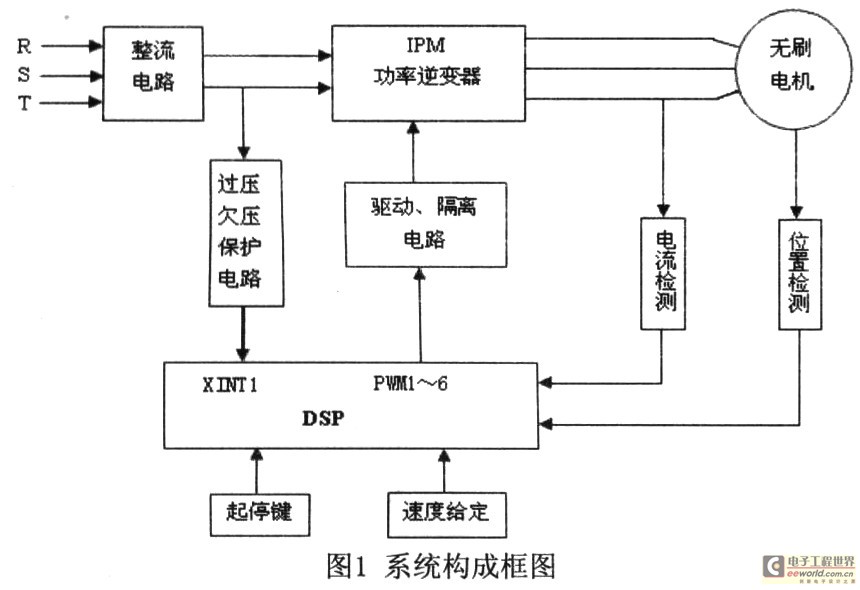
三相無刷直流電機控制系統(tǒng)框圖如圖1所示,,系統(tǒng)主要由DSP控制模塊、智能功率模塊和轉(zhuǎn)子位置檢測模塊三大部分構(gòu)成,。系統(tǒng)根據(jù)轉(zhuǎn)子位置檢測模塊檢測到的電機位置信號,,控制DSP輸出正確的6路PWM脈沖信號,經(jīng)過驅(qū)動電路以控制智能功率模塊中相應(yīng)功率管的通斷,,從而實現(xiàn)對電機的正確供電,,控制電機正常運行。
2 TMS320LF2407A模塊的介紹
TMS320LF2407A模塊主要由DSP芯片,、電源,、晶振、外擴RAM和輸出引腳組成,。TMS320LF2407A有兩個事件管理器EVA和EVB,,每個模塊包括:兩個16位的通用定時器;8個16位的脈寬調(diào)制通道(PWM),,他們能夠?qū)崿F(xiàn)三相反相器控制,,能捕獲位置信號,可產(chǎn)生可調(diào)死區(qū)的各種PWM波,。該模塊在本控制系統(tǒng)中擔(dān)當(dāng)著重要的控制角色,。
DSP硬件的調(diào)試不但需要示波器等傳統(tǒng)的儀器,還需要專門的仿真套件,,本文使用的是XDS510仿真器,,該仿真器包括一個PC插卡和一個JTAG接口,通過該接口可以訪問DSP芯片的所有資源,,而且同時可以設(shè)置斷點,、單步執(zhí)行等,以檢驗和調(diào)試所設(shè)計的目標(biāo)電路是否正確,。
3 基于IPM控制電路的設(shè)計
智能功率模塊IPM由高速,、低功率的IGBT和優(yōu)選的門級驅(qū)動及保護電路構(gòu)成。雖然IPM雖有諸多優(yōu)點,,但其內(nèi)部電路不含有防止干擾的信號隔離電路,、自保護功能和浪涌吸收電路,為保證IPM安全可靠,,需要設(shè)計這部分電路,。
3.1 IPM外部驅(qū)動電路的設(shè)計
IPM功率驅(qū)動電路如圖2所示。為了保證強電部分和弱電部分電路的電氣隔離,,需將控制部分和驅(qū)動部分相互隔離,。來自DSP的6路PWM信號經(jīng)電阻限流后經(jīng)高速光耦隔離并放大后接IPM內(nèi)部驅(qū)動電路以控制相應(yīng)開關(guān)管工作。IPM的故障信號也需隔離之后送到DSP。UFO,、VFO,、WFO、FO分別為IPM內(nèi)部的上橋臂三路故障輸出信號和下橋臂一路故障輸出信號,。這些內(nèi)部故障信號經(jīng)光耦PC817轉(zhuǎn)換為相應(yīng)的故障輸出信號F01,、F02、F03和F04,。

IPM用的隔離光耦要求上升沿延時tPLH<0.8μs,,下降沿延時tPLH tPHL<0.8 μ s,共模抑制比CMR>10kV/μs,,因此選用HCPL4504型高速光耦,,且為了提高光耦的轉(zhuǎn)換速度,在光耦輸入端接1只0.1 μ F的退耦電容,。
3.1.1 一路上橋臂驅(qū)動電路
以圖2中其中一路上橋臂為例來說明驅(qū)動電路工作原理,,其中VUPI為電源+15V, VUPC為電源地,,UP為驅(qū)動控制信號的輸入端,。由DSP輸出的一路上橋臂PWM信號和VCC分別接高速光藕HCPL4504的3、2管腳,,當(dāng)PWM信號為低電平時,,HCPL4504的5、6將會導(dǎo)通,,從而使控制信號輸入IPM模塊UP端,,控制相應(yīng)橋臂的IGBT導(dǎo)通。其中每個開關(guān)管的控制電源端采用獨立隔離的穩(wěn)壓15V電源,,且接1只10 μ F的退耦電容器以濾去共模噪聲,。R15根據(jù)HCPL4504光耦輸入電流要求(25mA)選取為200 Ω。R16根據(jù)IPM驅(qū)動電流選取,,且盡可能小以避免高阻抗IPM拾取噪聲,,另一方面又要足夠可靠地控制IPM,本系統(tǒng)選為4.7k Ω,。C9為2號端與地間的0.1 μF濾波電容(上橋臂其它兩路連接電路與其類似),。
一般IPM需用四路獨立電源來防止內(nèi)部上下橋路發(fā)生直通短路,其中上橋臂每個IGBT需要一個單獨的隔離電源供電,,共需3組;而下橋臂3個IGBT共用l組隔離電源供電,。
3.1.2 三路下橋臂驅(qū)動電路
圖2中IPM模塊的三路下橋臂可由一路公共電源統(tǒng)一供電,,VNI與VNC分別接電源的+15V與地。由DSP產(chǎn)生的三路PWM2、PWM4,、PWM6信號輸入IPM的UN,,VN,WN端,,分別控制其下橋臂對應(yīng)的IGBT開關(guān)管的通斷,。
3.2 IPM緩沖電路設(shè)計
由于IPM在高頻開關(guān)過程和功率回路寄生電感等疊加產(chǎn)生的di/dt,dv/dt和瞬時功耗,,給器件以較大的沖擊,,易損壞器件。設(shè)置緩沖電路(即吸收電路)就是改變器件的開關(guān)軌跡,,控制各種瞬態(tài)過電壓,,降低器件開關(guān)損耗,保護器件安全運行,。
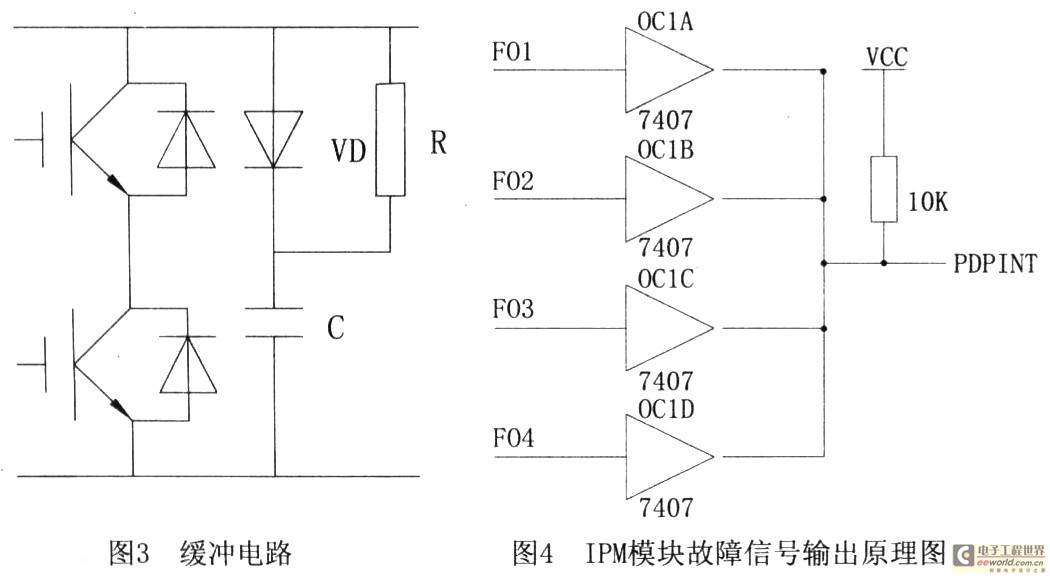
圖3為常用的大功率IPM緩沖電路,。R,C,,VD值的選取原則為:一般電阻電容值按經(jīng)驗數(shù)據(jù)選取,,如PM200DSA060電容值為0.47~2 μ F,耐壓值是IGBT的1.1~1.5倍,,電阻值10~20Ω,,電阻功率為![]()
式中:f為IGBT工作頻率;U為IGBT工作峰值電壓,;C為緩沖電路與電阻串聯(lián)的電容,。但RC時間常數(shù)應(yīng)設(shè)計為開關(guān)周期的1/3,即τ=T/3=1/(3f),。二極管選用快恢復(fù)二極管,。為保證緩沖電路的可靠性,可以根據(jù)功率大小選擇已封裝好的如圖3所示的專用緩沖電路,。
3.3 IPM的保護電路
在以DSP芯片為核心的控制系統(tǒng)中,,利用DSP事件管理器中功率驅(qū)動保護引腳(PDPINT)中斷實現(xiàn)對IPM的保護。通常1個事件管理器產(chǎn)生的多路PWM可控制多個IPM工作,,其中每個開關(guān)管均可輸出FO信號,。圖4為IPM模塊故障信號輸出原理圖。三路上橋臂的故障信號和一路下橋臂的故障信號經(jīng)過一個7407的OC門之后再經(jīng)過一個上拉電阻就可直接輸入DSP的PDPINT引腳,。正常工作時,,所有的FO信號均為高電平,從而PDDPINT也為高電平,,一旦任何一路橋臂有故障發(fā)生,,則PDPINT變?yōu)榈碗娖剑瑥亩|發(fā)DSP的電源保護中斷,使其所有的PWM輸出引腳均呈高阻狀態(tài),,起到對IPM模塊的保護作用,。
4 檢測模塊的設(shè)計
4.1 位置檢測和速度計算
位置檢測不但用于換相,而且還用于產(chǎn)生速度控制量,。本系統(tǒng)的位置信號是通過3個霍爾傳感器得到,,每個霍爾傳感器都會產(chǎn)生180°脈寬的輸出信號。3個霍爾傳感器的輸出信號互差120°相位差,。這樣在每個機械轉(zhuǎn)中共有6個上升或下降沿,,正好對應(yīng)著6個換相時刻。將DSP設(shè)置為雙沿觸發(fā)捕捉中斷功能,,就能獲得這6個時刻,,再通過DSP的捕捉口檢測電平狀態(tài),就可以判斷是哪個霍爾傳感器的什么沿觸發(fā)的捕捉中斷,,確定了換相信息,,就可以實現(xiàn)正確換相。位置信號還可以用于產(chǎn)生速度控制量,,每個機械轉(zhuǎn)有6次換相,,測得兩次換相的時間間隔,就可以計算出兩次換相間隔間的平均角速度,。
4.2 電流檢測
電流檢測電路由霍爾元件,、運算放大器和DSP內(nèi)部A/D轉(zhuǎn)換器組成。由于輸出電流信號較弱,,需用同相放大器放大,。對于三相電機,電流采樣只需在電機三相繞組的任意兩相上安裝兩個霍爾元件,,來檢測電流信號,。由于存在下列關(guān)系式:ia+ib+ic=0,因此只需檢測任意兩相的電流值,,就可得到另外一相的電流值,。在每個PWM周期對電流采樣一次,采樣時刻應(yīng)在PWM周期的"開"期間中部,,通過DSP定時器啟動ADC轉(zhuǎn)換來實現(xiàn),。
5 軟件設(shè)計
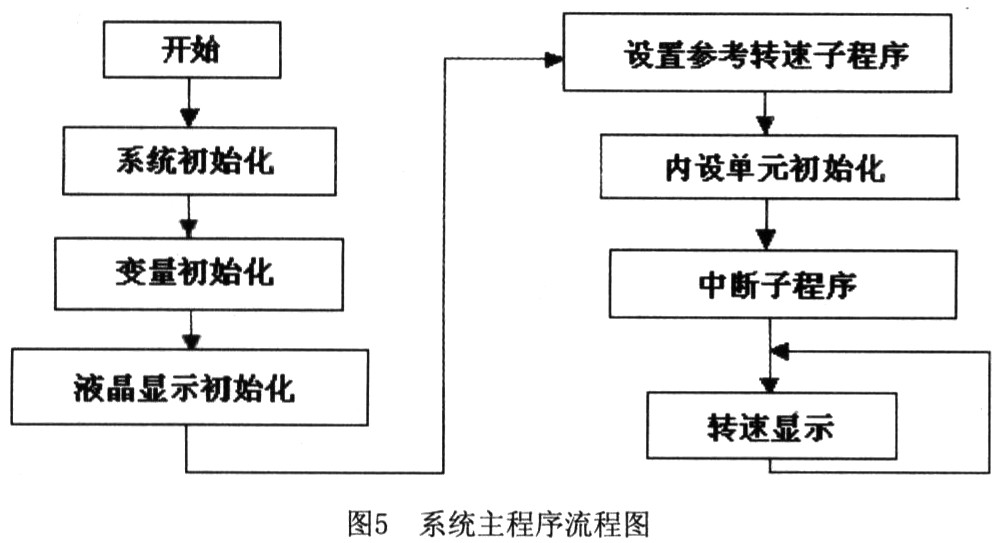
系統(tǒng)軟件采用DSP的匯編語言編程,并進行了模塊化設(shè)計,。軟件主要包括:主程序,,初始化子程序、捕捉中斷子程序,,A/D轉(zhuǎn)換子程序,,顯示子程序等,。其中主程序如圖5所示,主要實現(xiàn)以下功能,。
1)系統(tǒng)初始化程序:主要是對DSP,芯片TMS320LF2407A的某些系統(tǒng)控制寄存器和IO功能進行設(shè)置:如時鐘倍頻,,一些管腳定義為輸入IO還是基本功能管腳,。
2)變量初始化:該部分對使用到的常量賦值,并對一些需要初始值的變量賦初值,。
3)液晶顯示初始化:該部分主要完成對顯示器件JM1602C的初始化設(shè)置,,如清顯示、輸入模式,、光標(biāo)位置等,。
4)設(shè)置參考轉(zhuǎn)速子程序:該部分調(diào)用鍵盤程序設(shè)定參考轉(zhuǎn)速,調(diào)用顯示程序顯示設(shè)置的參考轉(zhuǎn)速,。
5)讀取位置信號:為了獲得位置信號,,只要調(diào)用一次捕捉中斷服務(wù)程序,并可對電機進行啟動,。
6)調(diào)速并實時顯示轉(zhuǎn)速:程序?qū)⒃谶@里等待中斷,,當(dāng)有中斷產(chǎn)生時,系統(tǒng)響應(yīng)中斷程序,,當(dāng)在等待中斷時,,根據(jù)定時器T1控制是否刷新顯示。
6 實驗及結(jié)論
應(yīng)用以上硬件電路,,筆者完成了電機參數(shù)為額定功率lOOW,,額定電壓220V,額定電流0.5A,,額定轉(zhuǎn)速1500 r/mi n,,用示波器測量其中一相波形實驗,波形如圖6所示,。圖6b是轉(zhuǎn)速在100r/min的U相電壓,,圖6a是1000r/min時的U相電壓,探頭均衰減1 0倍,。實驗結(jié)果表明:用DSP(TMS320LF2407A)為主控芯片,,以IPM(PM50RSAl20)為功率驅(qū)動電路,設(shè)計的三相無刷直流電機的啟動和穩(wěn)速控制系統(tǒng)方案可行,,系統(tǒng)安全可靠,、簡單實用。
