
1 引言
鐵路運輸消耗能源巨大,,鐵路行業(yè)節(jié)能任務艱巨。如何使鐵路列車更節(jié)能具有重要意義,?;?a class="innerlink" href="http://forexkbc.com/tags/預測控制" title="預測控制" target="_blank">預測控制理論的機車節(jié)能運行控制系統(tǒng)通過建立機車節(jié)能運行速度預測模型來預測列車節(jié)能運行的速度-距離曲線,從而建立列車節(jié)能系統(tǒng),,機車司機根據(jù)提示信息控制機車節(jié)能運行,。該機車節(jié)能運行控制系統(tǒng)簡單可靠,對電力機車乃至工業(yè)控制具有實用參考價值,。
2 系統(tǒng)設計
圖1給出基于預測控制理論的機車節(jié)能運行控制系統(tǒng)結(jié)構框圖,。信息采集單元負責采集供信息實時計算單元使用的開關量、模擬量,、數(shù)字量,,并通過軟件調(diào)理數(shù)據(jù),最終將有用信息發(fā)送到CAN總線上供其他單元接收,;信息實時計算單元接收CAN總線上的有用數(shù)據(jù),,并處理數(shù)據(jù),以便計算軟件調(diào)用,循環(huán)計算機車牽引力,、制動力,、列車阻力等參數(shù),預測機車節(jié)能運行速度,,最后將這些數(shù)據(jù)發(fā)送到CAN總線,,供信息顯示單元接收數(shù)據(jù)顯示相關信息。

2.1 基于預測控制的速度預測模型
預測控制模型是根據(jù)被控對象的歷史信息和未來輸入預測系統(tǒng)實現(xiàn)未來輸出,。預測機車節(jié)能運行速度是根據(jù)預測控制算法,,建立一個描述系統(tǒng)動態(tài)特性模型。在建立機車運行速度預測模型中,,根據(jù)模型預測控制的功能分為:
(1)歷史信息 機車進行速度預測所依據(jù)的線路縱斷面信息包括區(qū)間坡度,、區(qū)間長度、區(qū)間彎道半徑和長度,、區(qū)間起點終點標高、隧道情況,、岔道信號等,,還包括系統(tǒng)本身采集的機車參數(shù)、眾多的模擬量,、開關量和數(shù)字量信號等,。
(2)未來輸入 被控對象為機車的速度,在速度預測的一個過程或者一個周期中,,將區(qū)間劃分為初始區(qū)間,、中間區(qū)間、末區(qū)間3個區(qū)間,,且根據(jù)限速條件設定末區(qū)間的終點速度,,而這個自行設定的終點速度即為被控對象的未來輸入。
(3)未來輸出 機車節(jié)能運行控制系統(tǒng)的主旨是通過已知的歷史信息,,根據(jù)牽引計算模型實時計算,,并結(jié)合機車優(yōu)化操縱策略預測速度。預測系統(tǒng)的未來輸出則是在計算區(qū)間后預測出速度曲線,。
2.2 速度預測模型的滾動優(yōu)化和反饋校正
預測控制的最主要特征是在線優(yōu)化,。由于司機操縱機車水平的差異,可能導致運行一段距離后機車的實際運行速度與預測速度誤差很大,,所以應及時修正誤差,,再次預測當前速度下的前方速度運行曲線。雖然實際速度與預測速度偏差較大,,但經(jīng)再次預測后,,司機又能按照當前速度行車。該系統(tǒng)通過滾動方式優(yōu)化速度預測曲線,可使機車在任何位置,,系統(tǒng)都能計算出當前狀態(tài)的最佳節(jié)能運行預測速度,。其中,不同時刻的速度預測指標,,其相對形式是相同的,,但絕對形式(即所含的時間區(qū)域和位置區(qū)域)是不同的。系統(tǒng)可提供任何時刻,、任何位置的節(jié)能運行操作方案,,其內(nèi)部是一個實時計算過程。從控制的全過程看,,該優(yōu)化過程是動態(tài)的,。
另外,在系統(tǒng)速度預測過程中,,一個周期預測輸出一條預測曲線,,而機車不同位置的實際速度與預測速度存在偏差,系統(tǒng)的反饋校正就是將與預測速度有偏差的實際速度反饋到速度預測模型中重新預測速度曲線,,使其實際速度與預測曲線的偏差變小,。當機車的實際運行曲線與預測曲線重合度越來越大時,機車的節(jié)能效果則更加明顯,。
3 硬件電路設計
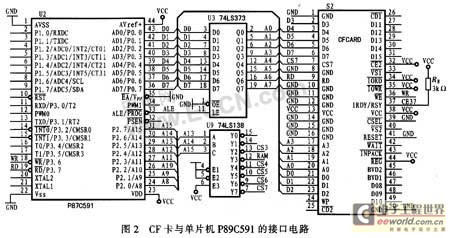
系統(tǒng)的硬件電路主要由信息采集單元,、信息實時計算單元、信息顯示單元三部分組成,。所有單元都通過CAN總線相連,。其中,信息采集單元是根據(jù)牽引計算模型采集所需機車信號,;信息實時計算單元則通過CAN總線接收采集數(shù)據(jù),,并對其處理后,根據(jù)文獻[2]的牽引計算公式,,并結(jié)合已存儲的線路縱斷面信息循環(huán)計算,,預測節(jié)能運行速度曲線,上述計算是通過軟件實現(xiàn)的,。圖2為數(shù)據(jù)存儲的CF卡與單片機P89C591的接口電路,。CF卡體積小,存儲容量大,,易于數(shù)據(jù)保存,,可存儲大量的線路縱斷面數(shù)據(jù),運行可靠,,功耗較小,,且易于和單片機連接,。信息顯示模塊通過CAN總線和節(jié)能控制信息實時計算單元進行通信,判別分析CAN總線上接收信息采集單元和信息實時計算單元發(fā)送到CAN總線上的數(shù)據(jù),,顯示出機車運行的重要數(shù)據(jù)及速度預測曲線,。該系統(tǒng)采用P87C591單片機作為核心控制器,其內(nèi)部集成有一個強大的CAN控制器模塊,。圖3為P87C591與CAN總線通信電路,。

4 速度預測功能軟件設計
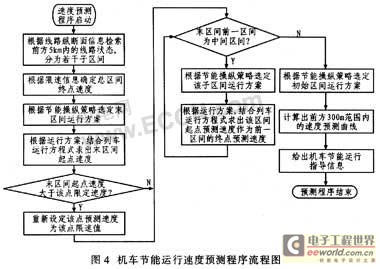
在機車節(jié)能運行速度的預測過程中,需要線路縱斷面數(shù)據(jù)以及所計算的列車作用力數(shù)據(jù),、列車運行工況等狀態(tài)量信號,。其中,線路縱斷面信息被預先存放到程序中,,供隨時檢索,。圖4給出機車節(jié)能運行速度預測程序流程圖。
5 結(jié)語
采用P87C591作為核心控制器,,并以預測控制理論為基礎對機車節(jié)能運行控制系統(tǒng)進行總體設計,。該預測控制的主要特點是預測模型、滾動優(yōu)化,、反饋校正,。利用該預測控制準確預測機車的節(jié)能運行速度,從而更好地指導機車司機采取節(jié)能方式操作機車,。該系統(tǒng)在機車節(jié)能控制方面具有很好的實用價值,同時對相關節(jié)能系統(tǒng)的研究也有一定的參考意義,。