
楊百翰大學(xué)(BYU)的聲學(xué)研究小組(ARG)由來自物理系與機(jī)械和電氣工程系的師生構(gòu)成。由于楊百翰大學(xué)已經(jīng)擁有LabVIEW及相關(guān)工具箱的NI院校單位許可證,因而使用LabVIEW配置和控制數(shù)據(jù)采集系統(tǒng)十分方便。
數(shù)據(jù)采集系統(tǒng)
我們目前的DAQ系統(tǒng)以NI PXI-1045型18槽機(jī)箱為基礎(chǔ),配備八個(gè)NI PXI-4462 DSA模塊,每個(gè)模塊帶有四個(gè)模擬輸入端口。24位的DSA模塊特別帶有6個(gè)可選模擬輸入增益,并且擁有最高204.8kS/s的同步采樣率。另外配置了一塊NI PXI-4461數(shù)據(jù)采集模塊以提供模擬輸出能力,該模塊擁有兩個(gè)模擬輸入和兩個(gè)模擬輸出。整體而言,該系統(tǒng)擁有34個(gè)輸入通道和2個(gè)輸出通道。我們還采用了NI PXI-7344中檔步進(jìn)/伺服控制器用于我們的自動(dòng)化運(yùn)動(dòng)控制應(yīng)用。
基于其優(yōu)異的性能和明顯的便捷性,我們選用了NI PXI-ExpressCard8360作為PXI機(jī)箱控制器,以方便使用筆記本電腦進(jìn)行控制。NI PXI-Express8360提供的數(shù)據(jù)吞吐量相比于傳統(tǒng)CardBus增加60%,,并且大多數(shù)筆記本電腦廠商都其部分產(chǎn)品上配置了ExpressCard插槽。我們購買了兩臺(tái)筆記本電腦用來控制PXI系統(tǒng):Dell XPS M140是一款帶有一個(gè)ExpressCard插槽的中型筆記本電腦,而Dell Latitude D820是一款稍大的帶有ExpressCard和CardBus兩個(gè)插槽的筆記本電腦,配置有SATA硬盤、2GB內(nèi)存以及高性能雙核處理器。因此我們使用XPS M140進(jìn)行日常應(yīng)用,而Latitude D820則主要用于要求高功率的高通道數(shù)應(yīng)用場(chǎng)合。采用這兩臺(tái)筆記本通過LabVIEW和NI DAQmx平臺(tái)對(duì)PXI機(jī)箱和DSA模塊進(jìn)行控制總是十分簡單方便。機(jī)箱和XPS M140筆記本電腦如圖1.所示。

圖1. NI PXI-1045機(jī)箱和Dell XPS M140筆記本電腦
PXI-446x模塊特別采用了壓電集成電路(IEPE)技術(shù),又稱恒流源(CCP)供電,無需為傳感器單獨(dú)提供電源,因此,使用測(cè)量傳感器進(jìn)行高精度聲學(xué)研究既經(jīng)濟(jì)又方便。楊百翰大學(xué)聲學(xué)研究小組擁有大約60個(gè)半英寸的Larson Davis、PCB和GRAS公司IEPE麥克風(fēng)。另外,大學(xué)最近購買了32個(gè)四分之一英寸的GRAS IEPE麥克風(fēng)用于小封裝、高帶寬或低靈敏度需求情形的的測(cè)量。 這些傳感器唯一的缺點(diǎn)在于:因?yàn)橥S電纜存在著固有電容,大型線纜情形下可用的帶寬受到限制。為了克服這個(gè)問題,在需要高頻、寬動(dòng)態(tài)范圍測(cè)量時(shí)我們使用了低電容的同軸電纜。
風(fēng)扇噪音特征辨識(shí)方案
聲學(xué)研究小組特別制定了兩套實(shí)驗(yàn)方案用于識(shí)別風(fēng)扇噪聲的特征。第一種方案采用是步進(jìn)電機(jī)控制的半圓形測(cè)量支臂,如圖2所示。13個(gè)半英寸的IEPE麥克風(fēng)固定在測(cè)量支臂上,通過測(cè)量支臂轉(zhuǎn)動(dòng)來測(cè)量半球指向性。PXI-7344控制器驅(qū)動(dòng)一個(gè)Oriental Motor步進(jìn)電機(jī)的伺服器和電機(jī),步進(jìn)電機(jī)再與各種齒輪嚙合,以1/60度的精度轉(zhuǎn)動(dòng)測(cè)量支臂。LabVIEW測(cè)量軟件界面截圖如圖3、圖4所示。
本測(cè)量程序的一個(gè)特點(diǎn)(見圖四右上角)是程序隨測(cè)量進(jìn)度可以對(duì)指定頻率繪制出增量指向性圖。對(duì)于箱裝風(fēng)扇,該支臂測(cè)量程序能夠獲得遠(yuǎn)場(chǎng)指向性與頻率和流量的關(guān)系。在主動(dòng)降低風(fēng)扇噪聲時(shí)進(jìn)行這些指向性測(cè)量工作還可以獲得整體噪聲降低的信息。

圖2. 圖片為楊百翰大學(xué)全消聲室內(nèi)半圓形測(cè)量支臂,60mm的軸流風(fēng)扇安裝在鋁制機(jī)箱頂面上,三腳架上安裝的設(shè)備是一個(gè)光速度計(jì)--用于測(cè)量風(fēng)扇的轉(zhuǎn)動(dòng)速度
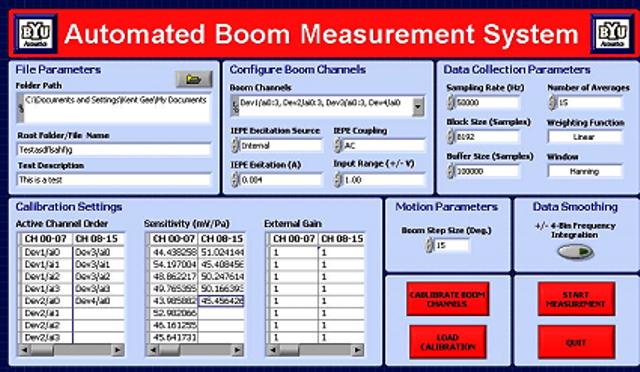
圖3. 支臂測(cè)量程序截圖
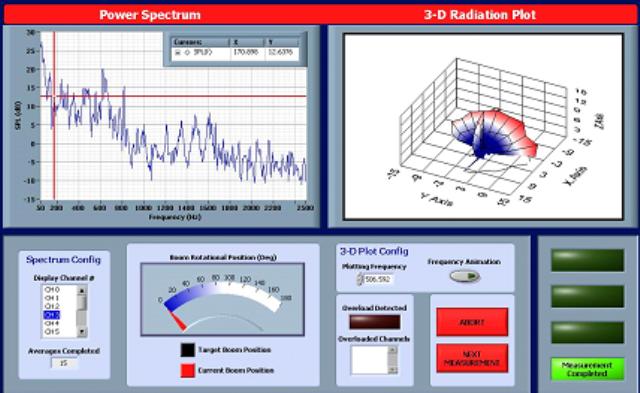
圖4. 這張截圖反映了支臂測(cè)量程序的測(cè)量示意屏是如何顯示任意通道的功率譜和指定給定頻率的指向性圖
第二種方案是采用近場(chǎng)線性陣列,我們使用它來研究風(fēng)扇噪聲源附近噪聲的音調(diào)和穩(wěn)定性。線性陣列包括23個(gè)四分之一英寸的GRAS麥克風(fēng),如圖5.所示間隔半英寸安裝布置。然后在機(jī)箱面上方手動(dòng)步進(jìn)陣列,步進(jìn)間隔為四分之一英寸或半英寸,從而繪制出二維聲壓場(chǎng)。由于風(fēng)扇正上方的麥克風(fēng)因空氣流動(dòng)產(chǎn)生了附加噪聲,因此二維壓力場(chǎng)繪圖時(shí)只采用氣流外部的麥克風(fēng)。圖5.中還可以看見四個(gè)小圓形揚(yáng)聲器,它們用于對(duì)聲場(chǎng)進(jìn)行主動(dòng)控制。主動(dòng)控制啟用時(shí),線性陣列可用于測(cè)定近聲場(chǎng)中產(chǎn)生的變化。
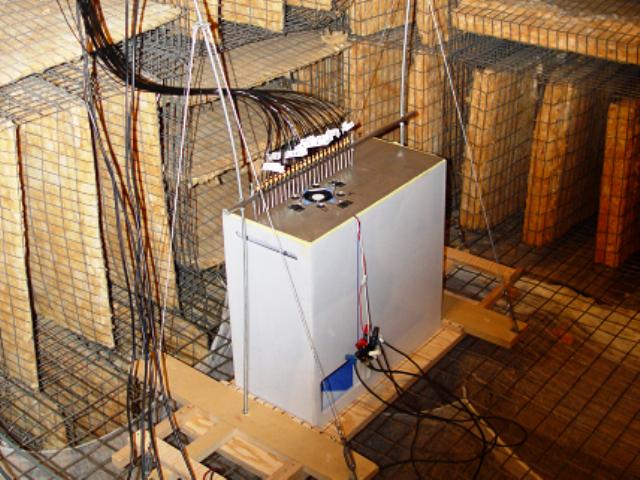
圖5. 用于近場(chǎng)風(fēng)扇噪聲特征識(shí)別的線性陣列
這些實(shí)驗(yàn)方案帶來了一個(gè)新的問題—麥克風(fēng)的標(biāo)定。高精度測(cè)量要求頻繁的校準(zhǔn),對(duì)于高通道數(shù)應(yīng)用而言這十分耗時(shí)。為了簡化這一過程,我們?yōu)镻XI系統(tǒng)開發(fā)了一套“靈活”的麥克風(fēng)標(biāo)定方法。在標(biāo)定過程中,只需一個(gè)研究人員首先啟動(dòng)控制室內(nèi)筆記本上的程序,然后帶著標(biāo)定器進(jìn)入隔音室。軟件同步從所有活躍通道快速采集數(shù)據(jù)并利用LabVIEW中的頻率/幅值檢測(cè)VI搜索數(shù)據(jù)獲得有效的標(biāo)定信號(hào)(250或1000Hz)。這個(gè)過程在程序循環(huán)內(nèi)不斷進(jìn)行直至檢測(cè)到一個(gè)麥克風(fēng)通道的有效標(biāo)定信號(hào)。一旦確定通道,研究人員可以使用NI信號(hào)和振動(dòng)工具包內(nèi)的SVL標(biāo)定麥克風(fēng)VI標(biāo)定該通道。
消聲室的一個(gè)LED確保研究人員獲知標(biāo)定狀態(tài)(見圖2. 中的紅白線纜)。LED由PXI-4461模塊的模擬輸出以LabVIEW中生成的12V方波直接驅(qū)動(dòng)。方波脈沖的頻率和持續(xù)時(shí)間告知研究人員標(biāo)定是否順利運(yùn)行。這一標(biāo)定過程十分有效,現(xiàn)在一個(gè)研究員可以用5分鐘左右的時(shí)間標(biāo)定完23個(gè)麥克風(fēng)。而楊百翰大學(xué)的其他數(shù)據(jù)采集平臺(tái)上標(biāo)定同樣數(shù)目的麥克風(fēng)通常需要兩個(gè)人且花費(fèi)時(shí)間更長。LabVIEW程序使得頻繁標(biāo)定變得更加簡單方便。
開發(fā)應(yīng)用程序
聲學(xué)研究小組使用PXI系統(tǒng)只花費(fèi)了幾個(gè)月時(shí)間就將風(fēng)扇噪聲特征識(shí)別系統(tǒng)開發(fā)完畢。然而,這些測(cè)量并不需要PXI-466x模塊的任何一項(xiàng)重要性能。本系統(tǒng)是用于火箭和噴氣式飛機(jī)的噪聲測(cè)量,這些應(yīng)用具有更高的性能要求。
火箭和噴氣式飛機(jī)噪聲的高幅值特征識(shí)別是現(xiàn)階段的研究難點(diǎn)。這些噪聲源的近場(chǎng)存在激波,激波上升時(shí)間快、含有重要的高頻成分,因而需要采用高帶寬的測(cè)量系統(tǒng)。此外,聲音信號(hào)幅值隨著頻率和發(fā)動(dòng)機(jī)工況不斷變動(dòng),這要求測(cè)量系統(tǒng)擁有一個(gè)較大的動(dòng)態(tài)范圍。
利用PXI-446x模塊,基于PXI和筆記本電腦的系統(tǒng)提供了高度靈活的測(cè)量。另外,實(shí)時(shí)導(dǎo)出大量數(shù)據(jù)的能力使得陣列測(cè)量成為可能,因而在發(fā)動(dòng)機(jī)運(yùn)行測(cè)試時(shí)能最大程度地發(fā)揮測(cè)量系統(tǒng)的潛能。
Latitude D820的檢測(cè)結(jié)果表明:它可以在所有34個(gè)通道以150kHz左右采樣率采樣時(shí)實(shí)時(shí)將單精度數(shù)據(jù)導(dǎo)入外部硬盤。如果使用內(nèi)部SATA硬盤,34個(gè)通道的實(shí)時(shí)數(shù)據(jù)采樣頻率最大可以達(dá)到204.8kHz。我們的測(cè)量系統(tǒng)使用筆記本控制器、擁有寬動(dòng)態(tài)范圍和高帶寬、支持IEPE傳感器,針對(duì)便捷高精度場(chǎng)測(cè)量應(yīng)用本系統(tǒng)算得上是頂尖級(jí)別的系統(tǒng),噴氣噪聲測(cè)量研究也證實(shí)了這一點(diǎn)。

圖6. F-16噴氣式飛機(jī)噪聲測(cè)量