
關(guān)鍵字:基地式 CAN總線 電動執(zhí)行器
現(xiàn)場總線控制系統(tǒng)FCS(Field bus Control System)利用現(xiàn)場總線開放,、具有互操作性的網(wǎng)絡(luò),,將現(xiàn)場各控制器與儀表設(shè)備互連,構(gòu)成控制系統(tǒng),,同時控制功能徹底下放到現(xiàn)場,,這樣降低了安裝成本和維護(hù)費用。因此,,F(xiàn)CS實質(zhì)是一種開放,、具有互操作性,、徹底分散的分布式控制系統(tǒng),已成為21世紀(jì)控制系統(tǒng)的主流,。
2 CAN總線電動執(zhí)行器的硬件設(shè)計
2.1 系統(tǒng)總體設(shè)計
CAN總線電動執(zhí)行器通過SJA1000和82C250與CAN現(xiàn)場總線通信,;通過驅(qū)動電路控制伺服電機(jī)正/反轉(zhuǎn),從而實現(xiàn)閥位控制,。為了避免通信過程中數(shù)據(jù)發(fā)生堵塞,,該設(shè)計采用雙MCU結(jié)構(gòu),利用雙口RAM作為兩個微控制器獨立訪問的存儲器,。其中負(fù)責(zé)通信的微控制器根據(jù)雙口RAM的指定存儲區(qū)存儲或讀取數(shù)據(jù),,并通過CAN現(xiàn)場總線實現(xiàn)通信;而另一個微控制器則通過雙口RAM的信息及信號采集檢測電路實現(xiàn)執(zhí)行機(jī)構(gòu)控制功能,。這兩片微控制器均選用AT89C51,。為了保證斷電或其他突發(fā)情況下信息不丟失,還增加了一個E2PROM器件24C08,。位置傳感器選用有間隙補償性電位器,,通過電位器把執(zhí)行機(jī)構(gòu)輸出軸的機(jī)械變化量按比例轉(zhuǎn)換成電信號,再經(jīng)A/D轉(zhuǎn)換后輸入到控制器,,參與執(zhí)行機(jī)構(gòu)的調(diào)節(jié),、控制,同時送至上位機(jī),,實現(xiàn)監(jiān)控和管理功能,。執(zhí)行機(jī)構(gòu)采用低速伺服電機(jī)。減速器采用具有高效行星減速傳動機(jī)構(gòu),,它把伺服電機(jī)輸出的高速低轉(zhuǎn)矩的旋轉(zhuǎn)運動轉(zhuǎn)換為輸出軸的大轉(zhuǎn)矩低速旋轉(zhuǎn),。
2.2 信號采集檢測電路
CAN總線執(zhí)行器接收來自上位儀表的4~20 mA模擬信號,或通過現(xiàn)場總線接收上位儀表發(fā)送的數(shù)字信號,,并將與執(zhí)行機(jī)構(gòu)位置傳感器反饋信號的偏差作為調(diào)節(jié)依據(jù),,使執(zhí)行機(jī)構(gòu)向消除差值的方向運動,,最終達(dá)到預(yù)定效果,。其中輸入A/D轉(zhuǎn)換器的參數(shù)為執(zhí)行機(jī)構(gòu)位置傳感器信號和電壓信號。因此,,A/D轉(zhuǎn)換器至少應(yīng)有2個輸入通道,。這里選用A/D轉(zhuǎn)換器AD7705,它有2個模擬通道,,可進(jìn)行2種模擬量的轉(zhuǎn)換,。高精密導(dǎo)電塑料電位器傳感器獲得的相應(yīng)閥門位置的電壓信號由AD7705的引腳6和7(AIN1和AIN2)輸入。A/D轉(zhuǎn)換信號采集電路框圖如圖1所示,。AD7705的輸出信號直接接至微控制器的RXD(P3.O)端,,TXD(P3.1)端則為AD7705提供時鐘信號,。因此,A/D轉(zhuǎn)換器的時鐘由微控制器AT89C51提供,。微控制器AT89C51利用串口與AD7705通信,,將串口設(shè)定為工作方式0,即同步移位寄存器方式,。此外,,該微控制器通過引腳P1.5控制CS,通過引腳P1.7判斷DRDY,。這樣,,系統(tǒng)首先選中,則要先清P1.5端口線,。接收數(shù)據(jù)時,,首先判斷引腳DRDY電平,若為低電平,,則表明已有有效的轉(zhuǎn)換數(shù)據(jù)存儲至AD7705的數(shù)據(jù)輸出寄存器,。

2.3 電機(jī)驅(qū)動控制電路
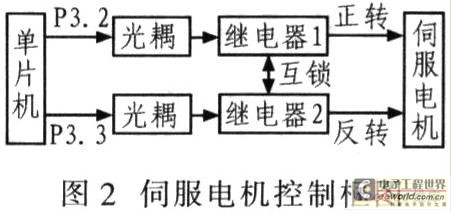
控制器接收執(zhí)行機(jī)構(gòu)的反饋開度信號,通過比較輸入信號與反饋信號,,產(chǎn)生啟停信號和換向信號,。控制開關(guān)以固體繼電器為核心,,根據(jù)單片機(jī)發(fā)出的啟停和換向信號控制兩個固體繼電器交替工作,,從而實現(xiàn)AC單相可逆電機(jī)啟停和換向控制。需要注意的是,,為了保證伺服電機(jī)正反轉(zhuǎn)換向,,在設(shè)計控制回路時,要考慮到保護(hù)電機(jī)的有效運行,,避免因動作不協(xié)調(diào)或電路老化導(dǎo)致電路短路,。主回路采取正反轉(zhuǎn)換向信號互鎖設(shè)計,消除正反轉(zhuǎn)時固體繼電器同時導(dǎo)通的可能性,,大大提高電子開關(guān)的可靠性,。
繼電器1的常閉觸點開關(guān)接繼電器2的電源,繼電器2的常閉觸點開關(guān)接繼電器1的電源,,當(dāng)單片機(jī)驅(qū)動伺服電機(jī)正轉(zhuǎn)時,,單片機(jī)輸出一個低電平到繼電器1,繼電器1通路,,繼電器1的常閉觸點斷開,,繼電器2被鎖死。同理,繼電器2通路時,,繼電器1被鎖死,。在控制開關(guān)主回路中串入極限位置保護(hù)開關(guān),當(dāng)閥門運轉(zhuǎn)至極限位置,,保護(hù)開關(guān)常閉點斷開,,硬性切斷控制開關(guān)主回路,會迫使電動機(jī)停止運轉(zhuǎn),,具有二次保護(hù)作用,。該系統(tǒng)采用單片機(jī)輸出的開關(guān)信號直接驅(qū)動電動機(jī)的直接控制方式。由于驅(qū)動電平的不同,,電路分為弱電和強(qiáng)電驅(qū)動兩部分,,兩者通過光耦隔離,伺服電機(jī)控制框圖如圖2所示,。
2.4 CAN通信接口電路
CAN通信接口電路主要由獨立CAN通信控制器SJA1000,、CAN總線收發(fā)驅(qū)動器82C250和高速光電耦合器6N137組成。微控制器AT89C51控制SJA1000實現(xiàn)數(shù)據(jù)接收和發(fā)送,。CAN通信控制接口電路如圖3所示,,SJA1000的AD0~AD7連接AT89C51的P0端口,圖中CS接AT89C51的P2.0,。P2.0為0時,,選中SJA1000,并通過片外寄存器地址對SJA1000執(zhí)行相應(yīng)的讀/寫操作,。SJA1000的RD/E,、WR、ALE/AS分別與AT89C51的對應(yīng)引腳相連,,其INT接AT89C51的INT0,,AT89C51采用中斷方式訪問SJA1000。

為了增強(qiáng)CAN總線節(jié)點的抗干擾能力,,SJA1000的TX0和RX0并不是直接與82C250的TXD和RXD相連,,而是通過高速光耦6N137后再與82C250相連,這樣可以實現(xiàn)總線上各CAN節(jié)點間的電氣隔離,。但應(yīng)注意的是,,光耦部分電路所采用的兩個電源5V和VCC-5V必須完全隔離。電源采用小功率的帶5 V隔離輸出的開關(guān)電源模塊,。82C250的引腳CANH和CANL通過1只5 Ω的電阻與CAN總線相連,。該電阻具有限流保護(hù)作用,,使82C250免受過流沖擊,。為了消除總線上的高頻十?dāng)_和電磁輻射,在引腳CANH和CANL與地之間并聯(lián)2只30 pF的電容。在引腳CAN總線和地之間還接有防雷擊管,,當(dāng)輸入端與地之間出現(xiàn)瞬變十?dāng)_時,,防雷擊管的放電具有一定的保護(hù)作用。82C250引腳Rs接有1只斜率電阻,,可根據(jù)總線通信速度選擇系統(tǒng)的工作模式,,該電阻大小一般為16~140 kΩ。
2.5 電源電路
整個CAN智能電動執(zhí)行器系統(tǒng)設(shè)計共使用3路電源:第1路主要是向微控制器控制電路,、鍵盤顯示,、雙口RAM及CAN控制等提供+5 V電壓;第2路是向CAN通信模塊和電機(jī)驅(qū)動電路的光耦隔離提供+5 V電源,;第3路是向電機(jī)控制電路繼電器提供+24 V電源,。電源器件LD03-10B24和D240505S-2W將交流220 V電壓轉(zhuǎn)換為電機(jī)控制繼電器所需的+24 V電壓,又通過D240505S-2W將+24 V電壓轉(zhuǎn)換為第1路,、第2路所需的+5 V電壓,。
整個系統(tǒng)的電源由220 V交流電源提供,因為這是220 V驅(qū)動的交流伺服電機(jī),,為了使整個電源輸入設(shè)計簡潔,,可以將其余兩路的所需電源也由交流電源220 V轉(zhuǎn)換,這樣整個系統(tǒng)的直流電源則由DC-DC轉(zhuǎn)換電源模塊D240505S-2W提供,。D240505S-2W的驅(qū)動電流最大可達(dá)0.5 A,,完全能夠驅(qū)動整個電路。
3 系統(tǒng)軟件設(shè)計
該系統(tǒng)軟件設(shè)計是根據(jù)系統(tǒng)功能要求而設(shè)計,?;厥紺AN總線智能電動執(zhí)行器的軟件程序設(shè)計分為:通信端和控制端。采用模塊化設(shè)計,,使得系統(tǒng)軟件結(jié)構(gòu)更清晰,,易于理解,同時便于調(diào)試,、連接,、修改和移植。該系統(tǒng)軟件主要分為電機(jī)控制及算法,、鍵盤及顯示,、CAN總線通信3部分。開發(fā)系統(tǒng)使用C語言和匯編語言進(jìn)行軟件編程,,這樣可以縮短開發(fā)周期,,降低開發(fā)成本,而且易于維護(hù)系統(tǒng)軟件,,提高可靠性,。系統(tǒng)控制端程序流程如圖4所示。

電機(jī)控制及算法部分則根據(jù)現(xiàn)場檢測信號和閥位反饋實現(xiàn)電機(jī)正反轉(zhuǎn)控制,考慮到執(zhí)行機(jī)構(gòu)動作的延遲,,采用不完全微分PID算法,。鍵盤及顯示模塊實現(xiàn)系統(tǒng)的參數(shù)設(shè)置及顯示功能。通信端通過CAN總線實現(xiàn)上位機(jī)監(jiān)控及現(xiàn)場儀表之間的通信,。
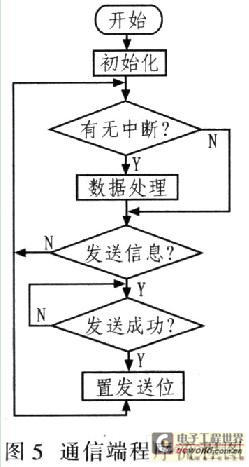
系統(tǒng)為了具有較好的實時性,,通信端接收信息采用中斷控制方式,通信端程序流程圖如圖5所示,。其中CANBUS中斷接收子程序是根據(jù)SJA1000的中斷寄存器內(nèi)容做出相應(yīng)處理,,如果是接收中斷,則將數(shù)據(jù)接收至MCU的內(nèi)部接收緩沖區(qū)并保存至ROM及雙口RAM,。CANBUS發(fā)送子程序?qū)?font color="#3e3e3e">SJA1000發(fā)送緩沖區(qū)中的內(nèi)容通過SJA1000發(fā)送給相應(yīng)的智能節(jié)點,。
4 結(jié)論
基地式CAN總線電動執(zhí)行機(jī)構(gòu)應(yīng)用單片微型計算機(jī)實現(xiàn)本地PID控制,減少了通訊次數(shù),,避免與控制設(shè)備通訊所發(fā)生的錯誤,,并且采用CAN總線技術(shù)使系統(tǒng)數(shù)據(jù)出錯率降低,發(fā)生嚴(yán)重錯誤時在不影響其他節(jié)點的情況下,,具有自動關(guān)閉功能,。經(jīng)測試表明,該CAN總線電動執(zhí)行器控制精度高穩(wěn)定性,、可靠性好,,而且操作控制簡單。