
一、引言
機械式停車設備行業(yè)在我國是近十幾年來發(fā)展起來的新興行業(yè)。隨著我國人民生活的不斷提高和汽車工業(yè)的高速發(fā)展,機械式停車設備以其獨有的優(yōu)越性,最近幾年得到了廣泛的應用。智能電梯式機械停車設備是自動化程度較高的機械式停車設備,為了能在提高空間利用率的同時又保證較高的存取車效率,對停車設備的設計、制造、安裝都要求有更高的標準,電氣控制系統(tǒng)也更具難度。本文介紹了我單位改造的上海國際金陵大廈智能化電梯式機械停車設備電氣控制系統(tǒng)的設計。
二、總體方案設計
智能化電梯式機械停車設備采用目前國內(nèi)最先進的智能控制系統(tǒng),司機只要將車開到旋轉(zhuǎn)升降臺上,控制系統(tǒng)便自動安全地將其輸送到指定的空車位,完成整個停車過程。采用電梯式停車設備,無論從高度、技術水平還是整個建設規(guī)模,是創(chuàng)造更多空間的最佳選擇。上海國際金陵大廈的電梯式機械停車設備的停車層采用鋼結構,分布在電梯行走的中央通道的兩側,每層停車層由左右各2個停車位組成,每個車位上均設置有停車定位架。升降機的總提升高度達42米。電梯式立體車庫平面總圖如圖1所示。
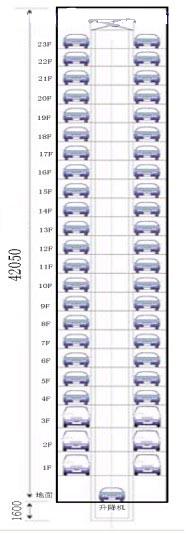
圖1 電梯式立體車庫平面總圖
1.主要技術性能指標設計
(1)停車標準尺寸(L×W×H):5050mm×1850mm×1550mm。
(2)停車數(shù)量:46。
(3)停車重量:1700Kg。
(4)升降電機功率:22kW;速度:120m/min。橫移電機功率:2.2?kW;速度:20m/min。轉(zhuǎn)臺電機功率:1.5kW;速度:4r/min。
(5)控制方式:PLC控制。
(6)操作方式:IC卡、觸摸屏、按鈕箱。
(7)存取時間:平均85s。
2.設備特點分析
(1)占地少,容車量大,高層設計最高能夠達到平均一輛車僅占一平方米的空間。
(2)安全性好,采用多重安全保護裝置確保設備運行安全。
(3)車輛存取速度快、效率高,車輛存取最長時間≤120秒。
(4)采用變頻調(diào)速技術,智能化程度高,可預約存取車、上下班高峰存取車和空車位導向。
(5)存取車輛均向前開,無需倒車。
(6)計費、監(jiān)控、檢測全智能化,管理人員少。
三、控制系統(tǒng)工作原理
這套全自動化系統(tǒng)的技術核心設備是升降機和鏟車,司機存取車時,操作員不必具備專業(yè)技能,只需將車開到進出口層的旋轉(zhuǎn)工作臺上,控制系統(tǒng)將自動發(fā)出指令,旋轉(zhuǎn)工作臺自動旋轉(zhuǎn)到升降機位置,然后升降機上升至要停放的樓層,升降機上的鏟車把車輛送到規(guī)定的停車位置,完成存車動作。取車過程則相反,由于在車庫的進出口室設置了一部自動轉(zhuǎn)盤,使司機取車時不用倒車出庫。整個停車庫系統(tǒng)還配有停車收費管理系統(tǒng),停車監(jiān)控系統(tǒng),停車報表打印系統(tǒng)等。控制系統(tǒng)總體方案圖如圖2所示。

圖2 控制系統(tǒng)總體方案圖
四、控制系統(tǒng)硬件設計
控制器采用三菱AnS系列的PLC,它是專為順序控制和數(shù)學運算而開發(fā)的控制器。AnS系列的PLC提供多種網(wǎng)絡系統(tǒng)組合和特殊功能組件,使其更完美地適用于過程控制、定位控制和其它各種類型的控制。本系統(tǒng)中下位機PLC模塊和各部件的功能:底板(A1S38B)、電源模塊(A1S61PN)、控制單元(A2USH-CPU-S1)、輸入模塊:A1SX42(傳感器和按鈕輸入信
號)、輸出模塊(A1SY10—控制輸出的信號)、網(wǎng)絡通信模塊(A1SJ71AP21—進行網(wǎng)絡通信)、高速計數(shù)模塊(A1SD62—編碼器讀數(shù)計數(shù))、模擬量輸入模塊(A1S64AD—變頻反饋信號)、模擬量輸出模塊(A1S62DA—變頻輸出信號)、串口通訊組件(A1SJ71UC24-R2— 觸摸屏連接的通訊接口);上位機PLC模塊和功能:底板(A1S38B)、電源模塊(A1S61PN)、控制單元(A2USH-CPU-S1)、輸入模塊(A1SX42-傳感器和按鈕輸入信號)、輸出模塊(A1SY10—控制輸出的信號)、網(wǎng)絡模塊(A1SJ71AP21—進行網(wǎng)絡通信)、通訊組件(A1SJ71UC24-R2—操作界面連接的通訊接口)、通訊組件(A1SJ71UC24-R2—打印機連接的通訊接口)。
根據(jù)實際應用情況,現(xiàn)場傳感器網(wǎng)絡設計包括16路傳感器輸入點信號連接到4個TM-4NC輸入單元,通過長距離通訊線連接到TM-S16通訊單元,然后連接到PLC的輸入模塊,注意配置正確的通訊單元參數(shù)。升降電機的變頻器采用富士公司的矢量變頻器FVRVG5S-2A-37?kW,鏟車變頻器采用三菱公司的FR-A520-5.5kW。
五、控制系統(tǒng)軟件設計
軟件部分的中心任務是上位PLC操作程序和下位PLC操作程序設計。上位PLC操作程序包括:操作顯示數(shù)據(jù)程序、存取報表打印程序、數(shù)據(jù)維護程序。下位操作程序包括:自動存車操作子程序(P101)、自動取車操作子程序(P102)、自動存入空板子程序(P105)、自動取出空板子程序(P106)、維修手柄操作程序、手動操作存取程序、觸摸屏操作程序。軟件流程圖如圖3所示。

圖3 軟件流程圖
存取車程序操作設計了自動、手動、檢修、只存、只取操作方式。“只存”操作方式應用在上班高峰時,此時主要是存入車輛;“只取”操作方式應用在下班高峰時,此時主要是取出車輛。上位機的應用軟件對系統(tǒng)的報警和實時工作狀態(tài)進行處理分析使操作管理人員充分了解停車場車位的可用數(shù)量、具體位置及用戶分類等,使操作管理人員合理調(diào)度,合理科學地對車場進行管理。
六、控制系統(tǒng)關鍵技術說明
1.升降機定位設計
升降機采用高速變頻矢量控制。采用編碼器(1200P/R)和定位地址芯片技術,應用輸入中斷處理,并根據(jù)不同的存取層調(diào)用不同的速度曲線數(shù)據(jù),每層的定位精度可達到±5mm,平均存取車輛時間為98秒。低速定位時矢量變頻的速度為50Hz~10Hz,矢量變頻高速運行時的速度為700Hz,加減速時變頻輸出速度按PLC數(shù)據(jù)運算表輸出,保證加減速平穩(wěn)。升降機矢量變頻控制如圖4所示。

圖4 升降機矢量變頻控制圖
矢量變頻控制符號說明:
FWD——PLC輸出控制的變頻正轉(zhuǎn)指令(升降機上升);
REV——PLC輸出控制的變頻反轉(zhuǎn)指令(升降機下降);
X1——PLC輸出控制的變頻預激磁指令;
X2——PLC輸出控制的變頻停止指令;
X3——PLC輸出控制的負載補償偏置(+)指令;
X4——PLC輸出控制的負載補償偏置(-)指令;
RYA——變頻器運行有速度時,輸出信號到PLC;
30B——變頻器運行錯誤時,輸出報警信號到PLC;
I2、I1——PLC特殊功能模塊A1S62DA輸出模擬信號(0~10V)控制矢量變頻速度;
A0、N——變頻負荷反饋信號(0~10V)輸入到PLC特殊功能模塊A1S64AD。
2.高速計數(shù)模塊應用設計
選用高速計數(shù)特殊功能模塊A1SD62。當接通電源或PLC復位時,初始值被寫入緩存中,它有2個通道的高速計數(shù),A1SD62共使用32點輸入和 32點輸出信號,比如系統(tǒng)使用X20-X3F、Y20-Y3F,那么Y34是CH1計數(shù)允許命令,Y3B是CH2計數(shù)允許命令。CH1?的采樣計數(shù)值緩存地址是4、5,CH2?的采樣計數(shù)值緩存地址是36、37。兩個通道高速計數(shù)的程序如圖5所示。
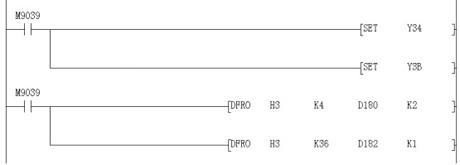
圖5 高速計數(shù)程序
3.數(shù)字-模擬變換模塊應用設計
選用D/A特殊功能模塊A1S62DA。它有2個通道的D/A轉(zhuǎn)換,并設定數(shù)值的分辨率為1/4000,當數(shù)值為4000時,對應的模擬輸入值為 10V,數(shù)值為2000時,對應的模擬輸入值為5V;數(shù)值為0時,對應的模擬輸入值為0V。A1S62DA共使用32點輸入和32點輸出信號,比如系統(tǒng)使用X0-X1F、Y00-Y1F,那么X1是D/A變換器準備好標志,X2是出錯標志,Y10是CH1?D/A變換值輸出允許標志,Y11是CH2?D /A變換值輸出允許標志,Y18是D/A模塊出錯復位標志,比如兩個通道模擬量輸出的程序如圖6所示。
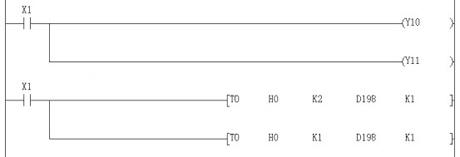
圖6 模擬量輸出程序
4.上位機和下位機通訊網(wǎng)絡設計
上位機和下位機的通訊通過網(wǎng)絡通訊模塊A1SJ71AP21連接。需要在軟件中設置網(wǎng)絡參數(shù)。選擇MelsecNet網(wǎng)絡,上位機設置網(wǎng)絡類型是 MNET?II-主站點,起始I/O號為0120總站數(shù)為1。然后進行網(wǎng)絡范圍分配,設置主站的發(fā)信范圍為W0000~W01FF,從站的發(fā)信范圍為 W0200~W03FF。下位機設置網(wǎng)絡類型是MNET?II-本地站點,起始I/O號為0120。
七、結束語
通過調(diào)試運行,整個停車設備的結構緊湊、設計合理、運行良好,充分發(fā)揮了AnS系列PLC控制器的高可靠性、強功能性等特點,特別是AnS系列PLC 的特殊功能模塊在停車設備中的應用具有推廣價值,對同行業(yè)的機械式智能化電梯式停車設備的設計具有借鑒意義。這種類型的停車設備,不僅在有效節(jié)約地域空間基礎上科學解決了停車占地難題,而且還提升主體建筑的價值。高智能化、自動化程度高、綠色環(huán)保等特征在行業(yè)中都有較領先的優(yōu)勢,特別使用于城市立體車庫的建造。