
引言
隨著能源問(wèn)題的日益突出,對(duì)電梯節(jié)能技術(shù)的研究與應(yīng)用已是眾多電梯生產(chǎn)商千方百計(jì)企及的目標(biāo)。純粹的節(jié)能技術(shù)例如最新成果節(jié)能再生器只是對(duì)電梯機(jī)械位能的重利用,未涉及電梯本身多余能耗,IC卡控制只是在一定程度上提高了電梯的智能程度。
現(xiàn)階段的電梯控制系統(tǒng),融入了多項(xiàng)高新技術(shù):例如現(xiàn)在很常見(jiàn)的視頻監(jiān)控技術(shù)、報(bào)警系統(tǒng)、多臺(tái)電梯并聯(lián)控制技術(shù)等等。融入視頻監(jiān)控技術(shù)就是從安全角度出發(fā)的。
電梯的監(jiān)視技術(shù)主要對(duì)電梯運(yùn)行狀況及電梯內(nèi)部進(jìn)行監(jiān)控與報(bào)警,而電梯轎廂外面的環(huán)境———即每層樓人們等待電梯的地方卻沒(méi)有更多的監(jiān)控。同時(shí),現(xiàn)在的監(jiān)控系統(tǒng)也沒(méi)有對(duì)有乘客可能存在的下一步行動(dòng)進(jìn)行及時(shí)而準(zhǔn)確的預(yù)判,從而做出相應(yīng)的指令動(dòng)作。也就是說(shuō),視頻監(jiān)控系統(tǒng)并沒(méi)有對(duì)采集來(lái)的信息適時(shí)地加以分析與利用。因此,將電梯外部環(huán)境納入到整個(gè)電梯控制系統(tǒng)中,并對(duì)視頻采集信息適時(shí)、快速、準(zhǔn)確地加以利用,這對(duì)電梯發(fā)展具有十分重要的意義。
由此,本文以電梯外部監(jiān)控為基點(diǎn),對(duì)電梯智能識(shí)別控制和綠色節(jié)能做出探討,以期電梯能更加高效化、智能化、綠色化。

1 監(jiān)控系統(tǒng)在電梯外部的應(yīng)用
在目前的電梯轎廂視頻監(jiān)視系統(tǒng)中,主要是從電梯內(nèi)部乘坐人士安全角度出發(fā),適時(shí)地監(jiān)控著電梯轎廂里面人們是否受到安全威脅,從而快速地報(bào)警。由于這不需要把信息反饋給電梯控制系統(tǒng),此時(shí)所需要的監(jiān)控系統(tǒng)中的人像檢測(cè),精度與速率要求都不高。
1.1 監(jiān)控系統(tǒng)中的人臉檢測(cè)
電梯控制中的人像檢測(cè)主要是通過(guò)建立一個(gè)組合分類器,剔除掉圖像中的非人像區(qū)域,找出圖像中類人像區(qū)域,提高下一步檢測(cè)的效率,如圖1所示。接著在檢測(cè)出來(lái)可能存在人像區(qū)域,用已經(jīng)建立好的人像檢測(cè)器進(jìn)行匹配運(yùn)算。
由于電梯只要有人有乘坐需求,就必須在此層作停留。所以在人像檢測(cè)過(guò)程就不需要多個(gè)人像檢測(cè)器同時(shí)進(jìn)行計(jì)算,找到一個(gè)最可能存在人像區(qū)域再進(jìn)行匹配運(yùn)算就可以大大提高效率。
在移動(dòng)人像檢測(cè)器進(jìn)行相關(guān)匹配運(yùn)算時(shí),如果讓人像檢測(cè)器通過(guò)逐點(diǎn)來(lái)檢測(cè)可能存在人像區(qū)域是否存在人像,最好情況就是第一次匹配運(yùn)算就找到了人像,但最壞情況是全部遍歷所有點(diǎn)后才可能找到人像,這樣的匹配運(yùn)算效率非常低下。本文采用的方法是:使人像檢測(cè)器在可能存在人像的區(qū)域中,任意找一點(diǎn)開(kāi)始進(jìn)行計(jì)算,若在該點(diǎn)匹配運(yùn)算后無(wú)人像存在,人像檢測(cè)器則朝相關(guān)度最大的方向移動(dòng),力求使匹配位置快速到達(dá)最佳匹配點(diǎn)。
該算法思想為:設(shè)置當(dāng)前匹配點(diǎn)為P1,對(duì)應(yīng)相關(guān)度為R1,在二維平面3×3的鄰域中選擇相關(guān)度最大的一個(gè)點(diǎn)為下一個(gè)匹配運(yùn)算點(diǎn),否則任選一個(gè)未參與運(yùn)算的點(diǎn),重復(fù)上述過(guò)程。同時(shí),把相關(guān)度歸一化,這樣就可以在[1,-1]設(shè)定一個(gè)閾值來(lái)確定當(dāng)前運(yùn)算點(diǎn)是否為最佳匹配點(diǎn)。
如圖2所示,某點(diǎn)(a,b)存在于I(M×N)窗口點(diǎn)陣圖像(該圖像為256級(jí)的灰度圖像)中,而W(m×n)則是人像檢測(cè)器點(diǎn)陣,它們都是256級(jí)的灰度圖像,這樣就有:0≤I(a,b)≤255,0≤a<M,0≤b<N;同樣在人像檢測(cè)器點(diǎn)陣有:0≤W(i,j)≤255,0≤i<m,0≤j<n;m∈(0,M),n∈(0,N)。
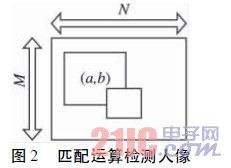
中等矩形框中的點(diǎn)(a,b)移動(dòng)并進(jìn)行匹配運(yùn)算,此時(shí)對(duì)應(yīng)的子圖像塊可記為Iw,Iw(a,b)=I(a+i,b+j)。因此,在點(diǎn)(i,j)處人像檢測(cè)器W與子圖像塊Iw歸一化相關(guān)度R(a,b)如下公式:

其中:W'是人像檢測(cè)器均值,I'w則為子圖像塊均值。
人們?cè)诘却娞莸絹?lái)的過(guò)程中,其相對(duì)位置變化不大。
這樣只需一個(gè)簡(jiǎn)單視頻采樣和較少的分類器就能完成人像區(qū)域的定位,同時(shí)也能保證人像檢測(cè)的效率,從而較好地為電梯下一步動(dòng)作提供準(zhǔn)確的信息。當(dāng)從電梯外部采集到復(fù)雜多事物的強(qiáng)動(dòng)態(tài)圖像,這時(shí)就需要多類特征提取及較多層次的分類器才能完成人像區(qū)域定位。本系統(tǒng)中的分類器是由之前通過(guò)采集各種非人像與人像,提取各自的特征進(jìn)行比較而訓(xùn)練出來(lái)的。
對(duì)于電梯的人像識(shí)別,它只要求快速檢測(cè)人像并確定其是否存在,并不需要提取人像的具體相關(guān)信息。但在實(shí)際的應(yīng)用中,有可能還需要用到人像查找與比對(duì)等精度要求。這里簡(jiǎn)要說(shuō)明提取人像信息相關(guān)步驟。
1)人像檢測(cè)。人像檢測(cè)是指在動(dòng)態(tài)的場(chǎng)景與復(fù)雜的背景中判斷是否存在人像,并分離出這種人像。
2)人像跟蹤。人像跟蹤是指對(duì)被檢測(cè)到的人像進(jìn)行動(dòng)態(tài)目標(biāo)跟蹤。具體采用基于模型的方法或基于運(yùn)動(dòng)與模型相結(jié)合的方法。此外,利用膚色模型跟蹤也不失為一種簡(jiǎn)單而有效的手段。
3)人像比對(duì)。人像比對(duì)是對(duì)被檢測(cè)到的人像進(jìn)行身份確認(rèn)或在人像庫(kù)中進(jìn)行目標(biāo)搜索。這實(shí)際上就是說(shuō),將采樣到的人像與庫(kù)存的人像依次進(jìn)行比對(duì),并找出最佳的匹配對(duì)象。
1.2 人像監(jiān)控下的電梯控制系統(tǒng)
傳統(tǒng)的電梯由門、監(jiān)視器和電梯控制器等幾大主要系統(tǒng)組成。這里的監(jiān)視器一般是指電梯曳引機(jī)監(jiān)視器,它對(duì)電梯電動(dòng)部分運(yùn)行狀況進(jìn)行監(jiān)控,一旦電梯本身發(fā)生機(jī)械故障等則采取相應(yīng)安全措施。另外還有視頻監(jiān)控系統(tǒng),它一般是對(duì)電梯轎廂內(nèi)部乘坐人員安全狀況進(jìn)行觀測(cè)。由此可見(jiàn),現(xiàn)階段的電梯系統(tǒng)并無(wú)專門的視頻監(jiān)控系統(tǒng)對(duì)外界有乘坐需求的人們進(jìn)行安全監(jiān)控和友好交互,與人交互僅限于每層樓的按鈕和電梯內(nèi)的控制面板,電梯的運(yùn)行只關(guān)心通過(guò)按鈕所傳來(lái)的指令。如果把電梯外部按鈕所在的外部環(huán)境加入到整個(gè)電梯系統(tǒng)中,讓電梯能夠迅速準(zhǔn)確地認(rèn)識(shí)到外部環(huán)境的改變,控制系統(tǒng)則發(fā)出應(yīng)對(duì)的指令。圖3就是人像監(jiān)控加入電梯控制系統(tǒng)后的電梯控制原理圖。
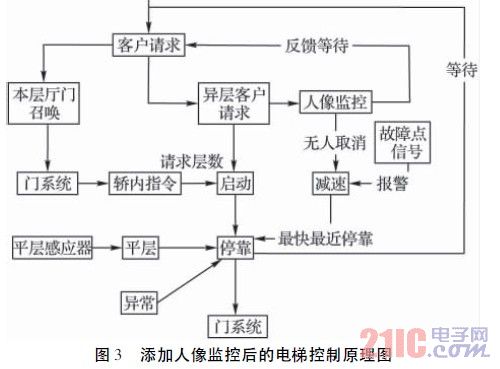
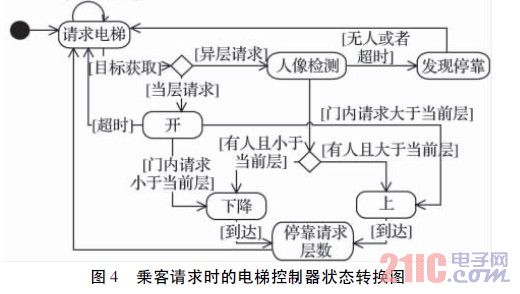
圖4為電梯控制器的狀態(tài)轉(zhuǎn)換圖,加入人像檢測(cè)過(guò)后,對(duì)有請(qǐng)求響應(yīng)的某層外部環(huán)境進(jìn)行監(jiān)控。這樣電梯就有了“眼睛”,它能夠快速知道當(dāng)前乘客是否一直有請(qǐng)求電梯的服務(wù),一旦發(fā)現(xiàn)乘客離開(kāi)而不再需要服務(wù),電梯將迅速停止當(dāng)前服務(wù)并自動(dòng)響應(yīng)下一請(qǐng)求,否則將停靠在最近的樓層。
1.3 轉(zhuǎn)換程序及監(jiān)控通信實(shí)現(xiàn)
1.3.1 轉(zhuǎn)換程序
下面是把人像監(jiān)控加入控制系統(tǒng)后電梯運(yùn)行一般場(chǎng)景的部分偽程序結(jié)構(gòu)。
publicclasselevatorRun();//電梯運(yùn)行
publicclassrequest();//客戶請(qǐng)求
main
if(客戶請(qǐng)求為當(dāng)前層)
o(wú)penDoor();//開(kāi)門
timeout();//計(jì)時(shí)器
closeDoor();//關(guān)門
insideButton();//內(nèi)部控制按鈕
getNextFloor();
elseif(客戶請(qǐng)求為異層)if(大于當(dāng)前層)
moveUp();//電梯向上運(yùn)行
getPhoto();//人像判斷
else(小于當(dāng)前層)moveDown();//電梯向下運(yùn)行
getPhoto();
else(異常)stop();
requestWait();//等待下一個(gè)請(qǐng)求
類getPhoto()的方法簡(jiǎn)介:
publicclassgetPhoto()
if(有人像)elevatorRun();
arrive();//平層感應(yīng)
stop();openDoor();timeOut();closeDoor();requestWait();
else(無(wú)人像)stopQuick();//最近最快停靠
requestWait();
1.3.2 監(jiān)控系統(tǒng)主動(dòng)發(fā)起通信請(qǐng)求的實(shí)現(xiàn)
當(dāng)電梯監(jiān)控服務(wù)器響應(yīng)電梯監(jiān)控通信請(qǐng)求時(shí),首先用initNet()初始化網(wǎng)絡(luò)函數(shù),然后利用voidgetInfo()函數(shù)完成數(shù)據(jù)接收工作,這里采用SOCKET接口技術(shù)。具體代碼如下。
BOOLinitNet();//初始化網(wǎng)絡(luò)函數(shù)
VoidgetInfo()
#definePORT6500//選擇端口
socketInit(NULL);
CsocketsocketClient;
socketClient.Create();
socketClient.Connect(127.0.0.1,PORT);
//127.0.0.1是客戶端的IP地址
intdataLength;
socketClient.Receive(&dataLength,16);//取得數(shù)據(jù)包長(zhǎng)度
byte*data=newbyte[dataLength];
socketClient.Receive(data,dataLength);//取得數(shù)據(jù)
destFile.Write(data,dataLength);//保存數(shù)據(jù)到緩沖區(qū)
destFile.Close();//斷開(kāi)連接
deletedata;socketClient.Close();
2 實(shí)例分析
電梯每停一次梯,減速、開(kāi)門、關(guān)門、加速一般需要近8s,對(duì)于運(yùn)行速度1.75m/s的電梯,8s可以運(yùn)行將近5層樓。不必要的減速、加速不僅大大增加了能耗,尤其是機(jī)械磨損也比正常運(yùn)行要大很多。同時(shí),頻繁的開(kāi)關(guān)門也使門的磨損大大增加。而電梯制動(dòng)頻繁時(shí),會(huì)導(dǎo)致電阻發(fā)熱,通常溫度都在100℃以上。為了使電梯不因高溫而產(chǎn)生故障,就需要安裝大排風(fēng)量的空調(diào)或風(fēng)機(jī),這樣一來(lái)能量消耗就更大了。
下面是某26層樓載重為1000kg電梯為例,每天電梯不間斷工作時(shí)間一般為10h,每小時(shí)的耗電量在15~22度1度=1kW·h=3600000J),相當(dāng)于每4min就用掉1度電。
表1是以小時(shí)為單位對(duì)電梯運(yùn)行數(shù)據(jù)樣本采集的平均值。等候時(shí)間是指電梯剛離開(kāi)到下一次電梯來(lái)到(電梯往相同方向運(yùn)行)的時(shí)間。消耗成本只計(jì)電價(jià)(0.5元/度),不計(jì)算消耗磨損等。從數(shù)據(jù)對(duì)照表來(lái)看,當(dāng)加入了人像監(jiān)控后,電梯的運(yùn)行效率有明顯提高。

表2是當(dāng)電梯外部無(wú)人的時(shí)候,電梯沒(méi)有發(fā)生1次誤停,這說(shuō)明電梯在一直確認(rèn)無(wú)人情況下,監(jiān)控系統(tǒng)的準(zhǔn)確判定率為100%。而當(dāng)電梯外部有人的時(shí)候,發(fā)生了1次電梯沒(méi)有準(zhǔn)確停靠,分析判定為燈光等環(huán)境因素造成監(jiān)控系統(tǒng)無(wú)法精確判定有無(wú)人的存在。當(dāng)開(kāi)始有人,后來(lái)沒(méi)有人的時(shí)候,這種情況下總共發(fā)生3次誤停:其中1次是由于電梯僅有1層樓距離到站時(shí),乘客才無(wú)乘坐需求走出監(jiān)控范圍之外,分析認(rèn)為監(jiān)控系統(tǒng)未能即時(shí)把信息反饋給控制系統(tǒng);另外2次誤停分析判定為人像監(jiān)測(cè)中發(fā)生誤差造成的。根據(jù)以上數(shù)據(jù),可以得出人像監(jiān)控系統(tǒng)中由于人像監(jiān)控時(shí)效性因素造成誤差2次,由于外界環(huán)境因素造成誤差2次,電梯準(zhǔn)確判定停靠率為98.46%(該準(zhǔn)確判定停靠率計(jì)算包含了轎廂內(nèi)乘客停靠要求)。

3 結(jié)語(yǔ)
總的說(shuō)來(lái),盡管電梯監(jiān)控系統(tǒng)沒(méi)有達(dá)到百分之百準(zhǔn)確判定,但電梯的停靠次數(shù)有了較大減少,也減少了乘客的等待時(shí)間,同時(shí)電梯的運(yùn)送能力并沒(méi)有明顯降低,即使不計(jì)機(jī)器本身的磨損,消耗成本也有了一定程度的降低。在電梯外部等待區(qū)域安裝攝像系統(tǒng),通過(guò)對(duì)有無(wú)乘客的判別做出是否在此停留,這是提高電梯運(yùn)行效率、節(jié)能減排最有效的方法之一。同時(shí),這還使整個(gè)電梯環(huán)境能更加安全地運(yùn)行———它能在電梯外部環(huán)境提供一定的監(jiān)視,攝像系統(tǒng)支持的一定時(shí)間段內(nèi)視頻存儲(chǔ)為之后對(duì)之前發(fā)生安全事故或者其他事件提供視頻依據(jù)。但由于人像檢測(cè)技術(shù)受復(fù)雜的外部環(huán)境,特別是光線等自然條件不可抗力因素的影響,以及本身算法需要一定時(shí)間,人像判定的準(zhǔn)確性和時(shí)效性有待于進(jìn)一步提高。