
1 引言
21 世紀(jì)以來(lái),汽車(chē)產(chǎn)業(yè)扮演了一個(gè)龍頭的角色,與此同時(shí),電子設(shè)備在整車(chē)制造成本所占比例,由16%增至30%以上,2010 年汽車(chē)搭載汽車(chē)電子的比例亦將達(dá)40%,未來(lái)的汽車(chē)電子產(chǎn)品中,圍繞安全、節(jié)能、環(huán)保、舒適和娛樂(lè)等方面的元器件及其周邊產(chǎn)品將發(fā)展更快。在此背景下,本文設(shè)計(jì)開(kāi)發(fā)了一個(gè)基于圖像處理技術(shù)的智能車(chē)載安全系統(tǒng)。
2 系統(tǒng)介紹
2.1 開(kāi)發(fā)平臺(tái)
本系統(tǒng)以EC5-1719CLDNA 開(kāi)發(fā)板為平臺(tái),EC5-1719CLDNA 支持Intel CoreDuo/Celeron M 低功耗處理器,由Intel945GM 芯片組集成圖形處理核心,支持VGA、LVDS,DVI,TV-OUT 多種顯示及雙屏幕顯示, 有 1 個(gè)PCI-104、1 個(gè)PCIE×4擴(kuò)展總線、4個(gè)USB2.0接口、2個(gè)SATA接口。
開(kāi)發(fā)板擴(kuò)展了豐富的外圍硬件設(shè)備,使用圖像處理開(kāi)源代碼opencv 中強(qiáng)大的算法技術(shù),結(jié)合信號(hào)處理技術(shù),充分發(fā)揮了此開(kāi)發(fā)板高速的CPU 性能。
2.2 系統(tǒng)框架
此系統(tǒng)功能劃分為三大方面:安全、通訊、多媒體。安全包括車(chē)牌測(cè)距、激光測(cè)距、疲勞駕駛檢測(cè)、全景環(huán)視系統(tǒng)(AVM)、酒精濃度檢測(cè)和溫度檢測(cè),通訊包括GPRS上網(wǎng)、GSM 通話、GPS 導(dǎo)航,多媒體,媒體播放器、包括車(chē)載娛樂(lè)系統(tǒng)、視頻采集。
系統(tǒng)框圖如圖1。

2.3 基本功能
系統(tǒng)實(shí)現(xiàn)功能有激光測(cè)距、疲勞檢測(cè)、酒精濃度檢測(cè)、GPS 定位、全景環(huán)視功能。
激光測(cè)距為測(cè)量汽車(chē)與其左右兩側(cè)可能存在的汽車(chē)之間的距離,確定是否安全,不安全則發(fā)出警報(bào)提醒。疲勞檢測(cè)為監(jiān)視人眼閉合時(shí)間,超過(guò)一定時(shí)間認(rèn)為駕駛員已疲勞,發(fā)出報(bào)警音。酒精濃度檢測(cè)為測(cè)試空氣中的酒精濃度,在酒精濃度超標(biāo)的情況下,發(fā)出警報(bào)。GPS 定位將GPS系統(tǒng)嵌入本系統(tǒng)內(nèi),從而實(shí)現(xiàn)GPS 定位。
全景環(huán)視系統(tǒng)在車(chē)輛四周安裝4 個(gè)攝像頭,通過(guò)四個(gè)攝像頭實(shí)時(shí)取景,將四個(gè)攝像頭所采集的圖像組合在一起顯示在駕駛室的顯示屏上,司機(jī)可以一眼了解到本車(chē)周?chē)娜壳闆r,提高汽車(chē)的綜合安全系數(shù)。
3 功能實(shí)現(xiàn)
3.1 激光測(cè)距的功能實(shí)現(xiàn)
原理圖如圖2,假設(shè)激光束與攝像頭的光軸完全平行,激光束的中心落點(diǎn)在攝像頭視域中為最亮點(diǎn)。當(dāng)激光束照射到攝像頭視域中的跟蹤目標(biāo)上時(shí),攝像頭就可以捕捉到這個(gè)點(diǎn)。
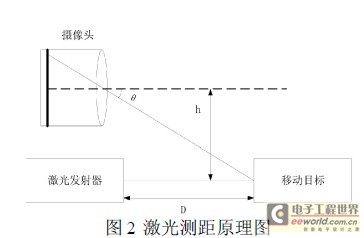
易推導(dǎo)得距離D:

其中:Num是從圖像中心到落點(diǎn)的像素個(gè)數(shù),Rop 是每個(gè)像素的弧度值,Offet 是弧度誤差。
算法流程為:首先,啟動(dòng)攝像頭,通過(guò)攝像頭采集視頻圖像,截取圖像;通過(guò)亮點(diǎn)檢測(cè)程序?qū)ふ壹す馑镜牧咙c(diǎn),如果存在,測(cè)量其距圖像中心的像素個(gè)數(shù)Num ;最后,通過(guò)公式計(jì)算間距,通過(guò)與設(shè)定的安全距離的比較,確定是否安全,不安全則發(fā)出警報(bào)提醒。
3.2 疲勞駕駛檢測(cè)功能實(shí)現(xiàn)
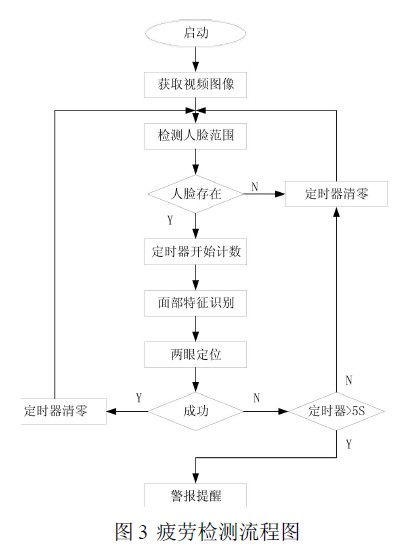
研究表明,人在發(fā)生困倦的時(shí)候,眨眼速度變慢,眨眼持續(xù)時(shí)間變長(zhǎng),本系統(tǒng)通過(guò)提取司機(jī)的閉眼持續(xù)時(shí)間的長(zhǎng)短來(lái)判斷是否有疲勞發(fā)生。
通過(guò)檢測(cè)人臉?lè)秶袛嗳四樖欠翊嬖冢绻淮嬖冢〞r(shí)器清零,返回;如果檢測(cè)到人臉,定時(shí)器啟動(dòng),開(kāi)始計(jì)數(shù);同時(shí),通過(guò)面部特征識(shí)別,來(lái)定位兩眼;認(rèn)為如果能在一定的時(shí)隙內(nèi)定位到兩眼,證明駕駛員并非出于疲勞駕駛狀態(tài);此時(shí)定時(shí)器清零,返回;如果在5S 內(nèi)無(wú)法定位到眼睛,則認(rèn)為處于疲勞駕駛,此時(shí)發(fā)出警報(bào)提醒。
算法流圖見(jiàn)圖3。
3.3 酒精濃度檢測(cè)功能的實(shí)現(xiàn)
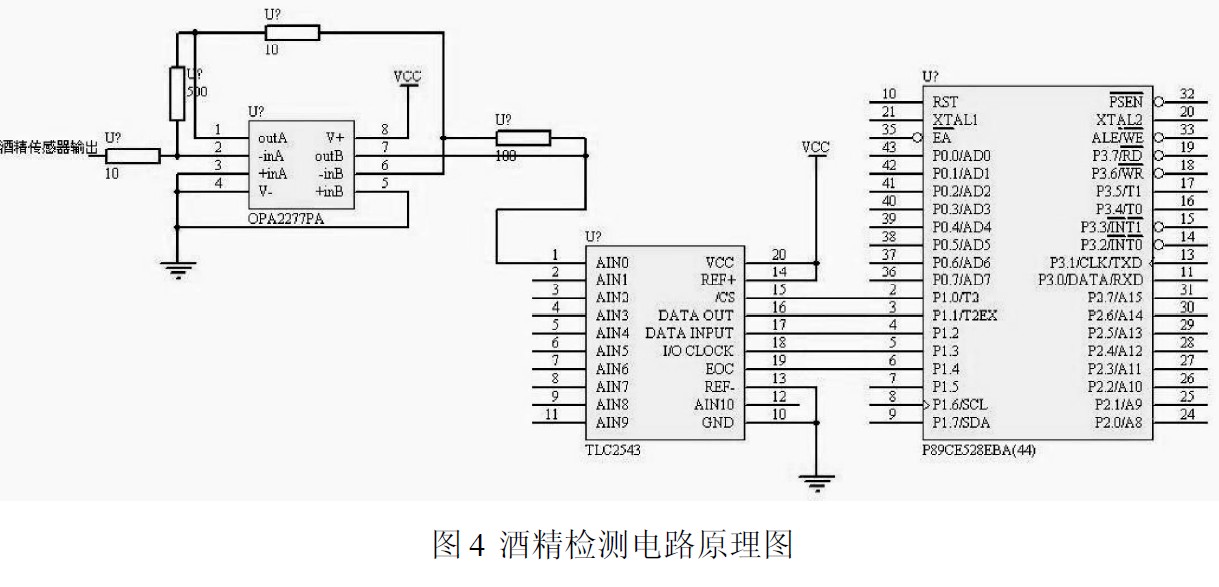
本系統(tǒng)利用酒精傳感器NAP-66E 來(lái)實(shí)現(xiàn)酒精濃度的測(cè)量。NAP-66E 具有良好的線性度,工作溫度范圍廣,可在各種惡劣的環(huán)境下正常工作,其輸出的最大電壓為10mV,因此為了獲取酒精度,必須先把酒精傳感器的輸出模擬量通過(guò)兩級(jí)放大器放大到和A/D轉(zhuǎn)換器TLC2543 匹配的電壓值,經(jīng)過(guò)A/D 轉(zhuǎn)換后,得到的數(shù)值在MCU 中進(jìn)行適當(dāng)?shù)奶幚恚詈笸ㄟ^(guò)串口線和PC 機(jī)進(jìn)行通信,把測(cè)得的數(shù)據(jù)實(shí)時(shí)傳輸給PC 機(jī),利用PC 機(jī)實(shí)現(xiàn)顯示、報(bào)警等功能。應(yīng)用酒精檢測(cè)芯片,通過(guò)與單片機(jī)、A/D 芯片、運(yùn)算放大器的硬件連接,構(gòu)成了酒精檢測(cè)模塊。設(shè)計(jì)電路如圖4 所示。
3.4 GPS 定位功能的實(shí)現(xiàn)
本系統(tǒng)使用GARMIN 公司的GPS 接收機(jī)OEM 板— GPS 15H,采用RS-232輸出,接口協(xié)議采用NMEA0183 版本2.00或3.00(可選)的ASCII 碼語(yǔ)句,數(shù)據(jù)更新率為每秒一次,串行傳輸參數(shù)為:波特律= 9600,數(shù)據(jù)位= 8 位,停止位= 1位,無(wú)奇偶校驗(yàn)。
在實(shí)現(xiàn)GPS數(shù)據(jù)的讀入時(shí)系統(tǒng)使用串口來(lái)接收數(shù)據(jù),軟件實(shí)現(xiàn)原理如下:
采用先初始化,設(shè)置使用的串口,相應(yīng)的波特律為9600,數(shù)據(jù)位為8 位,停止位為1 位。在用戶點(diǎn)擊接收按鈕后,采用查詢方式,從讀入1 0 2 4 個(gè)字節(jié)尋找GPRMC( Global Position RecomendedMinimum Specific ) 之后的一些字符串,在GPRMC 中包括了程序中最關(guān)心的數(shù)據(jù)有效位,緯度和經(jīng)度,數(shù)據(jù)格式如下:
$GPRMC,<1>,<2>,<3>,<4>,<5>,<6>,<7>,<8>,<9>,<10>,<11>,<12>,<13>
<1> 當(dāng)前位置的格林尼治時(shí)間,格式為hhmmss
<2> 狀態(tài), A 為有效位置, V 為非有效接收警告,即當(dāng)前天線視野上方的衛(wèi)星個(gè)數(shù)少于3 顆。
<3> 緯度, 格式為 ddmm.mmmm
<4> 標(biāo)明南北半球, N 為北半球、S為南半球
<5> 徑度,格式為dddmm.mmmm
<6> 標(biāo)明東西半球,E 為東半球、W為西半球
<7> 地面上的速度,范圍為0.0 到999.9
<8> 以后的數(shù)據(jù)不使用。
為了接收數(shù)據(jù)方便,用相應(yīng)的軟件屏蔽掉不需要的語(yǔ)句,只剩下GPRMC 語(yǔ)句。由于GPS 模塊上電后在露天的場(chǎng)合下大約90 秒左右得到有效數(shù)據(jù),所以在找到GPRMC 中的G 后的第13 位為數(shù)據(jù)有效位。
當(dāng)判斷到‘A’時(shí),從數(shù)據(jù)段中的第17位起讀取后續(xù)9位作為緯度顯示,再?gòu)牡?9位起讀取后續(xù)10 位作為經(jīng)度顯示。然后將接收到的GPS 經(jīng)緯度通過(guò)適當(dāng)?shù)霓D(zhuǎn)換自動(dòng)調(diào)用庫(kù)里的地圖,并在地圖上用紅色點(diǎn)表示當(dāng)前所在的位置。
3.5 全景環(huán)視功能實(shí)現(xiàn)
全景環(huán)視系統(tǒng)在車(chē)輛的車(chē)頭前格柵、左右側(cè)面外后視鏡及尾門(mén)安裝了4 個(gè)攝像頭。攝像頭帶有廣角鏡頭,可進(jìn)行實(shí)時(shí)廣角攝影。軟件上采用DirectShow 開(kāi)發(fā)包進(jìn)行開(kāi)發(fā),用Di rectShow 開(kāi)發(fā)應(yīng)用程序,可以很方便地從支持WDM驅(qū)動(dòng)模型的采集卡上捕獲數(shù)據(jù),并且進(jìn)行相應(yīng)的后期處理乃至存儲(chǔ)到文件中。