
引言
車載成像技術(shù)是一種將成像設(shè)備置于車載平臺的遠距離、非接觸獲取目標圖像的技術(shù)和方法,是未來汽車智能化的關(guān)鍵。但是由于攝像機隨車體晃動導(dǎo)致輸出的圖像序列不穩(wěn)定,圖像序列晃動量較大,易使觀察者產(chǎn)生疲勞,也會嚴重影響后續(xù)處理的精度,因此,必須對車載圖像序列進行穩(wěn)定。
目前,車載穩(wěn)像技術(shù)使用較多的算法為特征點法和灰度投影法。特征點法能對任意形式的圖像運動進行運動矢量估計,但在處理一些畫質(zhì)較差,特征貧乏的圖像時,精度往往很低,很難適應(yīng)車載視頻穩(wěn)像的各種環(huán)境變化;灰度投影法只能處理只含平移運動和較小旋轉(zhuǎn)運動的情況,且要求圖像有一定的對比度。而車載視頻往往拍攝時路況環(huán)境比較復(fù)雜,如雨霧天氣,這就給算法處理的精度帶來很大影響。本文針對這種情況,采用小波的方法對圖像進行預(yù)處理,提高灰度投影法在車載穩(wěn)像應(yīng)用中的抗干擾能力。
1 車載穩(wěn)像系統(tǒng)框圖
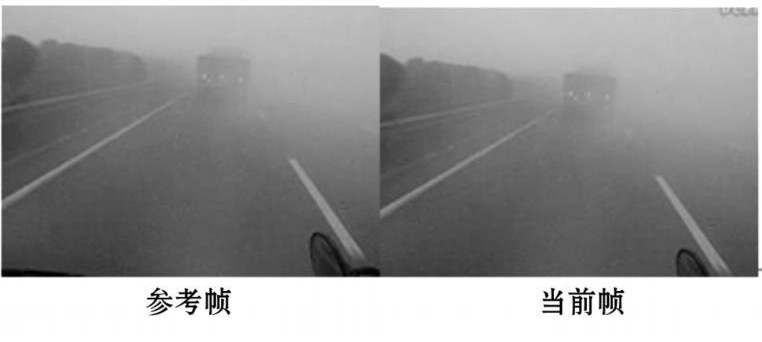
電子穩(wěn)像是利用電子設(shè)備和數(shù)字圖像處理技術(shù)相結(jié)合的方法,通過計算選定的參考幀圖像和被比較的當前幀圖像的運動矢量,再根據(jù)獲得的運動矢量按照某種準則對當前圖像進行補償,從而消除或減輕圖像序列幀間的隨機抖動,獲得穩(wěn)定的圖像序列。
電子穩(wěn)像作為車載穩(wěn)像系統(tǒng)中的核心部分,其系統(tǒng)結(jié)構(gòu)如圖1所示。
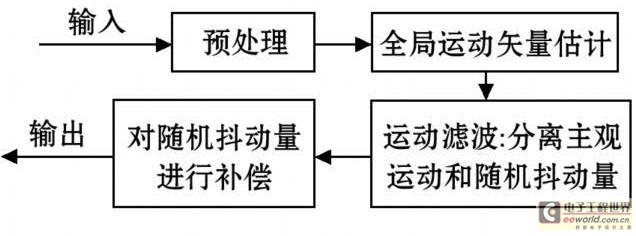
圖1 系統(tǒng)框圖
其中,全局運動矢量估計是整個穩(wěn)像系統(tǒng)的關(guān)鍵,它決定了穩(wěn)像精度和耗時性。
1.1 運動矢量估計算法
通過對高速路抖動特點的分析,并且對目前在電子穩(wěn)像中常用的運動估計算法進行各自優(yōu)缺點的比較,本系統(tǒng)決定采用灰度投影算法進行全局運動矢量估計。
灰度投影算法:投影法是利用圖像總體灰度變化規(guī)律來確定圖像運動矢量的一種方法,它不必對圖像上的每一點做相關(guān)運算,而是利用圖像的灰度投影曲線做一次相關(guān)運算,因此它的運算量小,運動估計速度快,容易滿足實時性要求,同時抑制噪聲的能力較強,并且在精度上也能較好地滿足要求。
該算法首先通過投影公式將每一幀二維圖像映射成兩個一維波形,其行列灰度值累加表示為:
式中:Ik(i)代表第k幀圖像第i行的灰度值,Ik(i)代表第k幀圖像第j列的灰度值,Gk(i,j)為第k幀圖像上(i,j)處的像素灰度值。為了避免因圖像抖動導(dǎo)致圖像邊緣信息發(fā)生變化,而影響互相關(guān)計算出的互相關(guān)曲線峰值,在進行互相關(guān)計算前,對圖像進行余弦濾波,去除圖像邊界信息波形而完整保留中心區(qū)域波形,減小邊界信息對互相關(guān)計算的影響,提高計算精度。投影濾波后,對參考幀和當前幀各分量的兩條曲線進行相關(guān)計算,找到兩條曲線的惟一谷值,即可確定出當前幀相對于參考幀的行列運動偏移量。相關(guān)運算的公式為:
式中:colc(n)和colr(n)分別為第i幀和參考幀的在一個方向上的灰度投影值,J為兩曲線中進行相關(guān)運算的單位長度,m為位移矢量相對于參考幀在一側(cè)的搜索寬度,即允許的最大正負抖動范圍,m在1至2m+1間取值。當C(k)為最小值時,此時k=Kmin,則第i幀圖像相對于參考幀圖像在一個方向上的位移矢量為:

以水平方向為例,vi為正時,表明當前幀相對參考幀向右移了|vi|個像素;為負時,表明向左移了|vi|個像素。同樣的方法,可以得到垂直方向的位移矢量。
1.2 針對雨霧天氣的圖像預(yù)處理
通過對灰度投影法原理的分析,可知灰度投影算法要求圖像有一定的對比度,當圖像灰度值單一并且對比度差時,利用灰度投影算法對圖像匹配會造成投影曲線很平,相關(guān)運算后波谷段平緩不易找到,難以找到正確的運動矢量。而雨霧天氣是車輛外出常常碰到的情況,惡劣天氣也給投影算法帶來很大影響。因此,需要對圖像進行預(yù)處理。傳統(tǒng)的預(yù)處理方法是通過直方圖均衡化進行,但這種方法存在丟失細節(jié)和過分增強的缺點,在增強圖像對比度的同時也增強了圖像的噪聲,給后續(xù)算法在運動矢量估計的精度上產(chǎn)生很大影響。因此,本文采用小波的方法,即圖像經(jīng)過小波變換分解為低頻部分和高頻部分,然后單獨對高頻部分圖像的邊緣進行加強。具體實現(xiàn)方法如下:
(1)選擇Haar小波對圖像進行分解,得到圖像的低頻子圖和高頻子圖;
(2)利用公式 (σ為噪聲標準方差,N為信號的長度)確定閥值λ;
(σ為噪聲標準方差,N為信號的長度)確定閥值λ;
(3)對高頻子圖按上述閥值進行邊沿檢測并標記;
(4)對標記的邊緣進行加強,對不是邊緣的置零。
采用上述方法進行實驗,結(jié)果如圖2所示:

(a) 雨天圖像增強
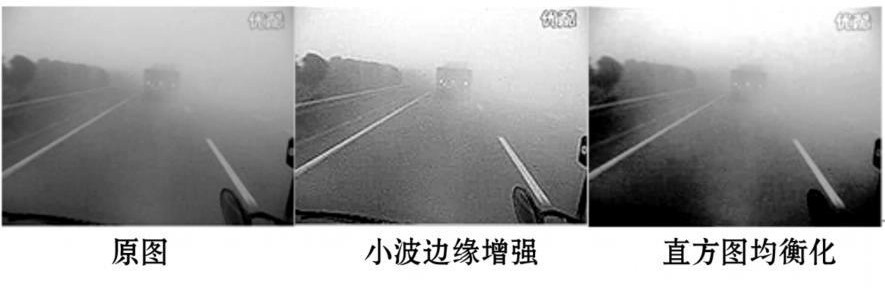
(b) 霧天圖像增強
圖2 圖像增強效果對比
通過以上結(jié)果可以看出,直方圖均衡化在整體增強圖像的同時,也對圖像噪聲進行了增強,圖像邊緣清晰度較差,圖像偏暗;而采用小波邊緣增強法處理的圖像,沒有很明顯的噪聲影響,同時圖像細節(jié)也很好地保留下來而且圖像對比度也得到了增強。
2 雨霧天氣下車載視頻穩(wěn)像的實驗
2.1 實驗方法
選取一段手動添加抖動的公路路段視頻進行試驗,以O(shè)penCV結(jié)合VC++6.0作為軟件開發(fā)平臺編寫車載穩(wěn)像算法,對視頻進行處理,最后將視頻輸出到顯示器上顯示。
2.2 運動矢量的估計
選用經(jīng)過預(yù)處理后的相鄰兩幀圖像根據(jù)公式(1)(2)進行投影變換,然后采用公式(3)計算兩幀圖像的行、列相關(guān)曲線。仿真結(jié)果如圖3所示:
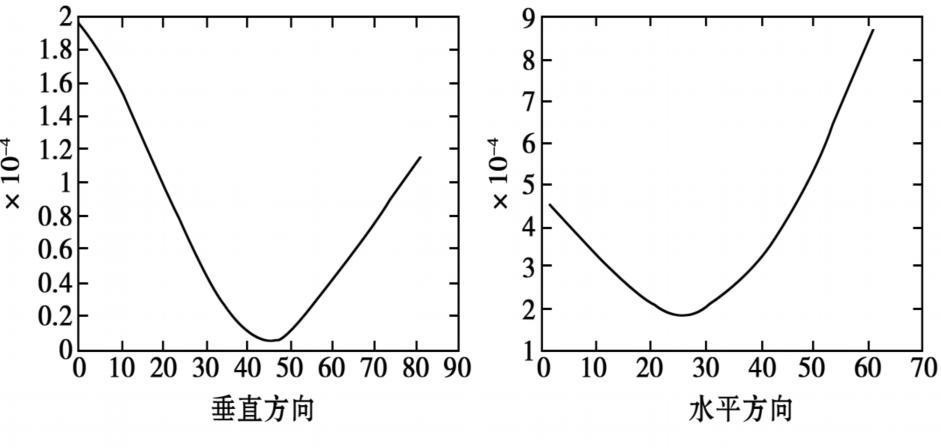
(a) 未預(yù)處理
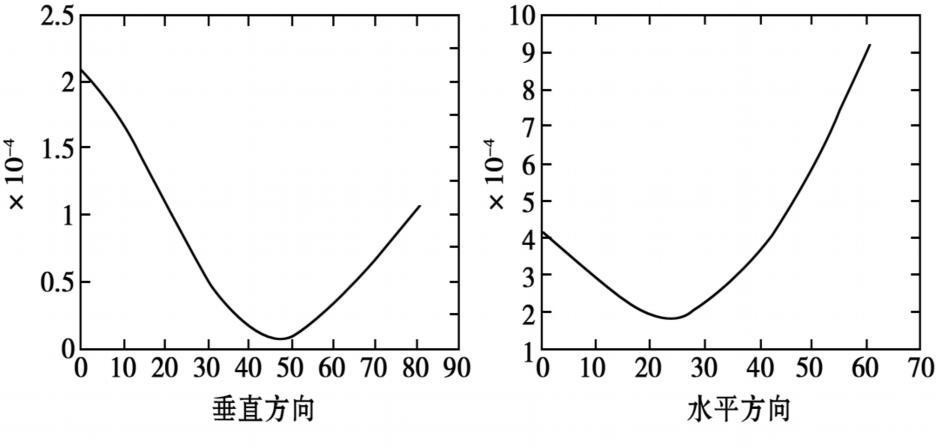
(b) 直方圖均衡化處理
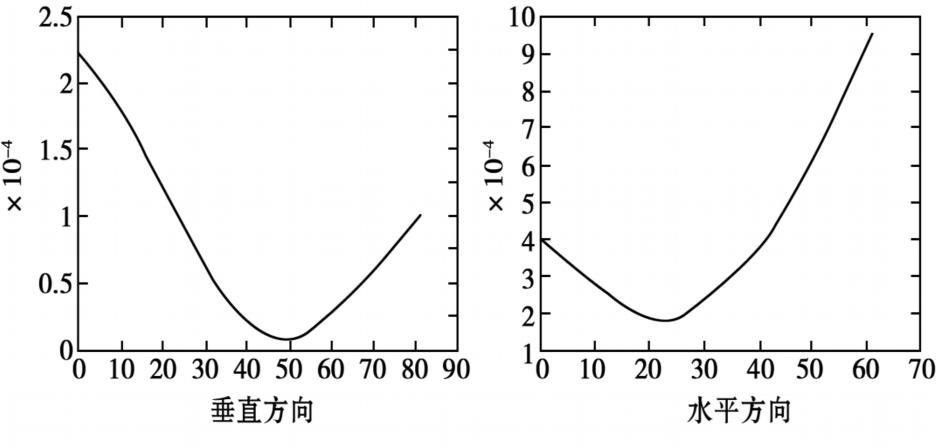
(c) 小波邊緣增強處理
圖3 兩種情況下的運動矢量估計
實驗中手動加入的水平和垂直方向的抖動量分別為-9和12;而實驗結(jié)果顯示,對未經(jīng)預(yù)處理的霧天圖像,由于對比度很差,采用灰度投影直接對其進行運動矢量檢測時,檢測到的水平和垂直方向的運動矢量分別為-3和5,誤差較大;而圖3(b)是經(jīng)過均衡化處理后,檢測到的水平和垂直方向運動矢量為-6和8,精度有所提高;最后圖3(c)是采用小波邊緣增強法對圖像進行對比度提高,檢測的水平和垂直方向的運動偏移量分別為-7和10,雖然還不能完全準確地檢測出實際偏移的運動矢量,但精度要高于直方圖均衡化處理后的檢測結(jié)果。
2.3 運動補償
本文采用兩兩相鄰幀進行運動矢量估計,得到的是相對位移矢量,而每一幀的絕對運動參數(shù)是前N-1個相對位移矢量之和。得到每一幀的絕對運動參數(shù)后,在采用kal-man濾波器進行運動曲線平滑處理,將處理后的參數(shù)按相反方向?qū)Ξ斍皫M行平移,即可得到穩(wěn)定后的圖像。實驗結(jié)果如圖4所示:
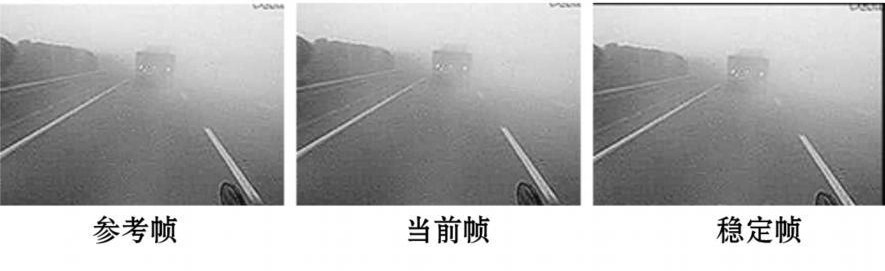
圖4 穩(wěn)定效果
3 實驗結(jié)果分析
算法在主頻Core(TM)2 Duo CPU 2.00 GHz,內(nèi)存2.00GB的PC機上,使用OpenCV結(jié)合VISUAL C++編程。實驗結(jié)果顯示,在實時性方面,穩(wěn)定320*240的圖像序列平均時間為0.025 18 s,大于25幀/s的圖像實時性處理要求。穩(wěn)像精度上,這里使用PSNR(Peak Signal To Noise Ratio)作為穩(wěn)像效果的一種評價標準。其計算公式如下:

其中均方誤差MSE表示兩幀圖像間每個像素的偏差值。當兩幅圖像內(nèi)容變化越小,PSNR值就越大,兩幅圖像完全一樣時,達到最大值。其中相鄰5幀圖像穩(wěn)像前后PSNR值比較如下:
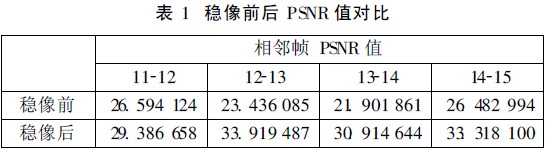
由表1中數(shù)據(jù)可以看出,經(jīng)過本系統(tǒng)處理后的視頻幀間重合度有了明顯地改善。
通過對50幀視頻圖像序列進行的實驗表明,經(jīng)過該方法處理后視頻的晃動幅度明顯得到了改善,基本達到了穩(wěn)像的要求。
4 結(jié)論
由于惡劣天氣造成圖像對比度降低,而直方圖均衡化處理效果不佳,造成灰度投影在車載視頻穩(wěn)定中對運動矢量估計精度的降低甚至失效。針對這一情況,本文采用小波邊緣增強的方法對圖像進行預(yù)處理,實驗表明,該方法有效提高了灰度投影算法的估計精度,并且算法也滿足實時性要求。