
近年來,隨著半導(dǎo)體制造技術(shù)的發(fā)展和計算機(jī)體系結(jié)構(gòu)等方面的改進(jìn),,數(shù)字信號處理技術(shù)得到了迅速的發(fā)展和運用,,DSP芯片的功能越來越強(qiáng)大,數(shù)字信號處理已成為信號處理技術(shù)的主流,。結(jié)合光學(xué)儀器向光,、機(jī)、電,、算一體化和智能化現(xiàn)代光學(xué)儀器發(fā)展的趨勢,,設(shè)計了一款基于高性能DSP芯片的同步可調(diào)式雙筒望遠(yuǎn)數(shù)碼相機(jī)。設(shè)計的專用攝遠(yuǎn)鏡頭,,消除了望遠(yuǎn)系統(tǒng)的成像畸變,,增加了成像圖片的景深效果。望遠(yuǎn)系統(tǒng)和攝遠(yuǎn)系統(tǒng)實現(xiàn)同步調(diào)焦,,保證了望遠(yuǎn)鏡像面和數(shù)碼照相攝錄系統(tǒng)感光芯片上成像清晰度改變的一致性,,遠(yuǎn)處景物的成像在望遠(yuǎn)系統(tǒng)中的比例和在照片中的比例相同。目前,,該研究已經(jīng)在某些電子望遠(yuǎn)設(shè)備上實現(xiàn)應(yīng)用,。
1 設(shè)計的基本思路與基本原理
望遠(yuǎn)數(shù)碼相機(jī)的數(shù)碼照相系統(tǒng)與望遠(yuǎn)系統(tǒng)相對獨立,分立采光,,按照望遠(yuǎn)物鏡與數(shù)碼照相鏡頭的入瞳直徑相匹配的原則,,設(shè)計計算出數(shù)碼鏡頭與望遠(yuǎn)鏡對3 m~無窮遠(yuǎn)目標(biāo)進(jìn)行成像的離焦對應(yīng)曲線,,采用中調(diào)手輪轉(zhuǎn)動帶動望遠(yuǎn)鏡和數(shù)碼鏡頭實現(xiàn)同步調(diào)焦,使遠(yuǎn)方同一景物目標(biāo)通過望遠(yuǎn)物鏡和數(shù)碼鏡頭的成像同時同步清晰,,使望遠(yuǎn)鏡真正成為數(shù)碼相機(jī)的光學(xué)取景器,再通過數(shù)碼鏡頭像面位置處的CMOS影像傳感器實現(xiàn)觀察目標(biāo)圖像信息的獲取,、存儲,、壓縮以及數(shù)字圖像的轉(zhuǎn)換、顯示和傳輸過程,。
2 數(shù)碼成像系統(tǒng)的設(shè)計與研究
根據(jù)要求,,采用了基于高性能DSP芯片的數(shù)字圖像信號處理技術(shù),以實現(xiàn)對實時圖像信息的獲取,、存儲,、轉(zhuǎn)換和數(shù)字圖像的傳輸與顯示。選擇美國德州儀器公司(TI)的高性能多媒體處理芯片TMS320DM642作為主處理器; SDRAM選用Micron公司T48LC4M32B-6;視頻采集芯片則是Micron的300萬像素的CMOS圖像傳感器MT9T001;采用高效,、穩(wěn)定,、可靠的嵌入式計算平臺,數(shù)碼照像系統(tǒng)結(jié)構(gòu)框圖如圖1所示,。

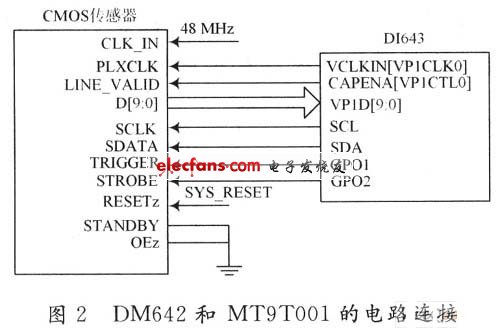
由于CMOS APS圖像傳感器在價格,、性能和功耗等各方面都優(yōu)于CCD圖像傳感器,而且集成了很多圖像處理功能,,因此在本系統(tǒng)的視頻采集模塊設(shè)計中,,選用了Micron公司生產(chǎn)的CMOS APS圖像傳感器芯片MT9T001?! T9T001是一款OxGA格式(有效像素為2 048×1 536)的CMOS數(shù)字圖像傳感器,。芯片上集成了模擬及數(shù)字自動增益調(diào)整、電平偏置調(diào)整,,以及視窗大小切換,、行列調(diào)整和閃光模式等功能,這些功能都可通過 I2C總線接口進(jìn)行編程控制,。該傳感器可以工作在默認(rèn)模式或者通過寄存器編程設(shè)置的用戶模式,。默認(rèn)模式將以12幀/s的速度輸出QxGA格式圖像。芯片上的APC轉(zhuǎn)換器為每個像素提供10 b的數(shù)據(jù)流,,并伴隨有行,、場同步信號輸出?! M642和cMOS圖像傳感器的連接如圖2所示,。為了接收視頻數(shù)據(jù),DM642的視頻端口必須配置成原始數(shù)據(jù)采集模式,。在這種模式下,,DM642對接收到的數(shù)據(jù)不做任何選擇或插值處理。這種操作模式適合接收CMOS圖像傳感器等特殊格式的數(shù)據(jù)。由于是傳輸原始數(shù)據(jù),,DM642和MT9T001之間的連線也相對簡單,,不需要行、場同步信號,。當(dāng)CAPENA信號被使能后,,VPID數(shù)據(jù)總線將開始接收數(shù)據(jù);采集速率由CMOS傳感器的PIXCLK時鐘決定。 DM642通過I2C總線CSCL和SDA控制CMOS圖像傳感器的工作模式,。
3 樣機(jī)試驗與檢測
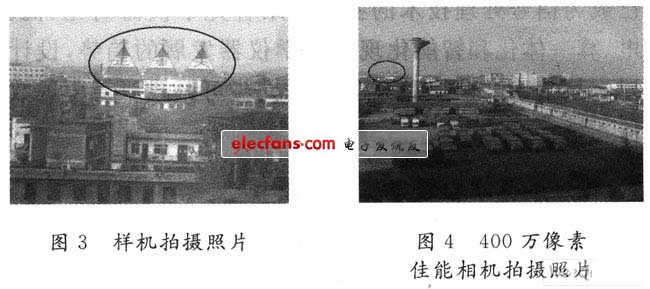
對試制樣機(jī)進(jìn)行性能檢測,、數(shù)碼鏡頭鑒別率檢測,對3 m遠(yuǎn)的相機(jī)分辨率標(biāo)板(ISO Resolution Chart for Electronic Still Cameras)進(jìn)行拍照后,,讀取分辨率數(shù)值,。實驗測得產(chǎn)品垂直分辨率達(dá)到8組,水平分辨率達(dá)到9組,,分辨率達(dá)到設(shè)計要求,。采用400萬像素佳能相機(jī)與樣機(jī)對同一地點、同一時問對同一景物(箭頭所指為拍攝目標(biāo))的進(jìn)行拍攝,,結(jié)果如圖3,、圖4所示。該設(shè)計實現(xiàn)了數(shù)碼望遠(yuǎn)功能,。
4 結(jié) 語
該研究立足于傳統(tǒng)雙筒望遠(yuǎn)鏡,,應(yīng)用先進(jìn)的數(shù)碼成像技術(shù),創(chuàng)造性地解決了通過結(jié)構(gòu)的準(zhǔn)確同步傳動,,實現(xiàn)對同一物體的觀察和拍攝問題,,使望遠(yuǎn)鏡真正成為數(shù)碼相機(jī)的取景器,實現(xiàn)了真正的所拍即所望,。