
摘 要:本文主要講述應(yīng)用臺(tái)達(dá)C2000變頻器在工廠自動(dòng)化控制中智能恒壓供水系統(tǒng)的應(yīng)用,介紹恒壓供水控制系統(tǒng)配置和控制工藝,以及臺(tái)達(dá)C2000變頻器的應(yīng)用技術(shù)。
關(guān)鍵詞:恒壓供水 變頻器 C2000

在傳統(tǒng)的區(qū)域供水系統(tǒng)中,用戶對(duì)供水壓力的要求都是經(jīng)由市政供水管網(wǎng)經(jīng)過二次加壓或高位水塔儲(chǔ)水池來滿足的。
日常供水控制通常采用水泵恒速運(yùn)行加調(diào)整出口閥開度的方式調(diào)節(jié)供水的水量水壓,這種供水的方式會(huì)使大量能量消耗在出口閥門,造成能源浪費(fèi);而且儲(chǔ)水池也會(huì)有二次污染的問題。采用變頻器作恒壓供水恰好可以克服這些問題。
臺(tái)達(dá)新近推出的C2000變頻器應(yīng)用在新塘牛仔城一家做7.5kW水泵的恒壓供水改造的牛仔布漂染廠中,很好的滿足了該應(yīng)用場(chǎng)合的適用特性。
恒壓供水控制原理
水泵變頻恒壓供水方式基于PID控制原理,維持管路供水壓力的恒定。當(dāng)用戶用水量加大時(shí),管路壓力減小,變頻器轉(zhuǎn)速要提高以增加流量補(bǔ)充壓力;反之,用戶用水量減小時(shí),管路壓力增大,變頻器轉(zhuǎn)速要降低,使流量適當(dāng)降低以使壓力恒定。這樣就可以使用戶得到穩(wěn)定的供水壓力。
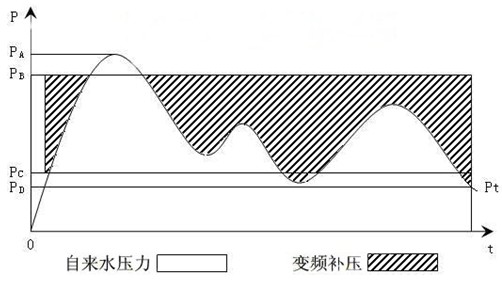
圖1 恒壓供水控制原理圖
如圖1所示,PA~PB是超高壓區(qū),即使變頻器停止運(yùn)轉(zhuǎn)水泵電機(jī)也無法降低的供水壓力的區(qū)間,這種情況是自來水供水壓力嚴(yán)重偏高造成的,但發(fā)生幾率比較小,或因?yàn)橛脩粲盟繕O少甚至沒有時(shí)發(fā)生,此時(shí)就需要變頻器停止水泵電機(jī)運(yùn)轉(zhuǎn);PB~PC是變頻器恒壓供水壓力區(qū)。PD~0區(qū)間是低壓區(qū),即使變頻器控制水泵電機(jī)運(yùn)轉(zhuǎn)到最大速度也無法提高供水壓力的區(qū)間,這種情況可能是市政供水系統(tǒng)發(fā)生問題(例如供水管道破裂等),或客戶端用水量過大造成,需要考慮更換供水設(shè)備或調(diào)整用水量。
PID回路控制原理
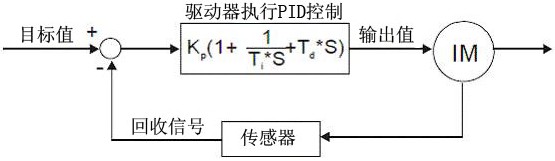
圖2 PID回路控制原理圖
如圖2所示,KP 比例增益(P 控制),Ti 積分時(shí)間(I 控制),Td 微分時(shí)間(D 控制),S 演算。
1.比例(P)控制
比例P 控制的輸出與輸入誤差信號(hào)成比例關(guān)系,當(dāng)僅有比例控制時(shí)系統(tǒng)輸出存在穩(wěn)態(tài)誤差。
2.積分(I)控制
在積分控制中,控制器的輸出與輸入誤差信號(hào)的積分成正比關(guān)系。對(duì)一個(gè)自動(dòng)控制系統(tǒng),如果在進(jìn)入穩(wěn)態(tài)后存在穩(wěn)態(tài)誤差,則稱這個(gè)控制系統(tǒng)是有穩(wěn)態(tài)誤差的或稱之為有差系統(tǒng)。為了消除穩(wěn)態(tài)誤差,在控制器中必須加入“積分項(xiàng)”。積分項(xiàng)對(duì)誤差取決于時(shí)間的積分,隨著時(shí)間的增加,積分項(xiàng)會(huì)增大。如此一來,即使誤差很小,積分項(xiàng)也會(huì)隨著時(shí)間的增加而加大,它推動(dòng)控制器的輸出增大使穩(wěn)態(tài)誤差進(jìn)一步減小,直到等于零。因此,比例(P)+積分(I)控制器,可以使系統(tǒng)在進(jìn)入穩(wěn)態(tài)后無穩(wěn)態(tài)誤差。
3.微分(D)控制
在微分控制中,控制器的輸出與輸入誤差信號(hào)的微分(即誤差的變化率)成正比關(guān)系。自動(dòng)控制系統(tǒng)在克服誤差的調(diào)節(jié)過程中可能會(huì)出現(xiàn)振蕩甚至失穩(wěn)。具有抑制誤差的作用,使抑制誤差作用的變化“超前”,即在誤差接近零時(shí),抑制誤差的作用就應(yīng)該是零。比例(P)+微分(D)控制器能改善系統(tǒng)在調(diào)節(jié)過程中的動(dòng)態(tài)特性。
控制工藝要求
(1) 設(shè)備要求能夠設(shè)定系統(tǒng)給定壓力值(5~6kg),即PID控制的目標(biāo)值;
(2) 壓力傳感器將實(shí)時(shí)采取數(shù)據(jù)作為PID控制的檢出值;
(3) PID 控制的目標(biāo)值與壓力傳感器檢出值大小比較后產(chǎn)生誤差量,將PID 控制的運(yùn)算結(jié)果輸出給控制供水泵電機(jī)的變頻器;
(4) 控制變頻器拖動(dòng)供水泵輸出不同轉(zhuǎn)速,達(dá)到調(diào)節(jié)供水恒壓的控制效果;
(5) 提供比例增益P、積分時(shí)間I、微分時(shí)間D參數(shù)的微調(diào)窗口;
(6) 兩臺(tái)水泵實(shí)現(xiàn)24h輪換使用控制;
(7) 單臺(tái)泵供水壓力不夠時(shí),實(shí)現(xiàn)當(dāng)前供水泵工頻切換,和變頻啟動(dòng)第2臺(tái)供水泵。
方案選型
1.變頻器:VFD075C43A;
2、壓力傳感器:量程0~16kg/輸出4~20mA。
電氣原理圖
電氣原理圖見圖3。
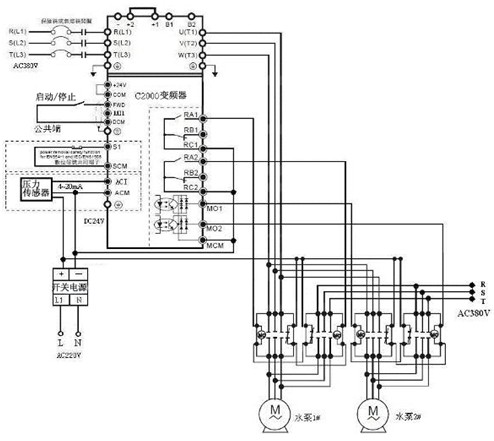
圖3 電氣原理圖
程序編輯
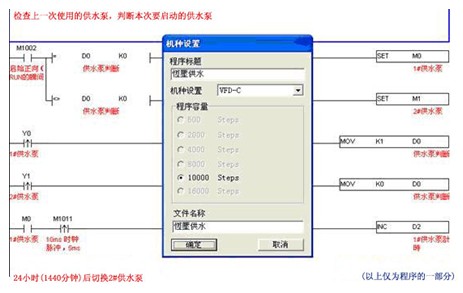
圖4 部分程序
參數(shù)調(diào)整
00-04=10(多功能顯示:顯示PID 回授值%(b))
00-20=0(面板設(shè)定目標(biāo)值)
00-21=1(外部控制啟停)
02-01=51(MI1功能=PLC 模式切換的選擇bit 0)
03-01=5(ACI為PID回授)
08-00=1(PID負(fù)回授)
00-25=32H,(顯示單位:kg;2位小數(shù))
00-26=16.00;(最大量程16.00kg)
應(yīng)用效果
C2000的功能還比較強(qiáng),調(diào)整參數(shù)后,基本能夠穩(wěn)定控制供水壓力5±0.1kg以內(nèi),滿足客戶要求。
通過這個(gè)項(xiàng)目測(cè)試了C2000在這恒壓供水的行業(yè)應(yīng)用可行性,以及可靠性,至目前為止客戶反映使用正常。若增加F系列的變頻器專門的水泵控制參數(shù),估計(jì)會(huì)更好應(yīng)用,直接定義參數(shù)就可以實(shí)現(xiàn)多泵切換,和定時(shí)切換。
作者簡(jiǎn)介:
林星華,出生于1974年2月,畢業(yè)于廣東工業(yè)大學(xué)機(jī)電一體化專業(yè),具有十多年的自動(dòng)化領(lǐng)域技術(shù)和服務(wù)經(jīng)驗(yàn),目前就職于中達(dá)電通華南大區(qū),負(fù)責(zé)臺(tái)達(dá)PLC、HMI、AMD、AIC、ASD等機(jī)電產(chǎn)品的技術(shù)支持。