
引 言
隨著高性能DSP控制器的出現(xiàn),采用數(shù)字化控制的UPS電源已成為現(xiàn)在研究的熱點(diǎn)。基于DSP實(shí)現(xiàn)的數(shù)字雙閉環(huán)控制能有效提高電源系統(tǒng)的抗干擾能力,降低噪聲,提高效率和可靠性,進(jìn)一步有利于電源的智能化管理、遠(yuǎn)程維護(hù)和診斷。在逆變器的多種控制策略中,重復(fù)控制技術(shù)能有效消除非線性負(fù)載和干擾引起的波形畸變;滑模變結(jié)構(gòu)控制方法能使系統(tǒng)運(yùn)行于一種滑動(dòng)模態(tài),能保證系統(tǒng)的魯棒性;模糊控制和神經(jīng)網(wǎng)絡(luò)控制等智能控制不依賴(lài)控制對(duì)象的數(shù)學(xué)模型,適應(yīng)于非線性系統(tǒng);無(wú)差拍控制能夠瞬時(shí)控制電壓,對(duì)負(fù)載有很強(qiáng)的適應(yīng)能力,有輸出總諧波畸變少,損耗少等優(yōu)點(diǎn); PID控制簡(jiǎn)單,并具有好的可靠性;新型數(shù)字化PID控制更能取得滿(mǎn)意的控制效果。各種控制策略各有優(yōu)缺點(diǎn),如果能把其中的兩種或幾種控制技術(shù)結(jié)合運(yùn)用,將取得更好的輸出特性。基于此思想提出數(shù)字PID控制和無(wú)差拍控制技術(shù)相結(jié)合的控制策略。理論和實(shí)踐證明,該方法具有廣泛的應(yīng)用前景。
1 系統(tǒng)結(jié)構(gòu)設(shè)計(jì)
該系統(tǒng)選用的TMS320F2812芯片是TI公司的TMS320C28x系列中的一種,其指令執(zhí)行速度快,從而可以在此基礎(chǔ)上實(shí)現(xiàn)復(fù)雜的控制算法,優(yōu)化系統(tǒng)的輸出特性。
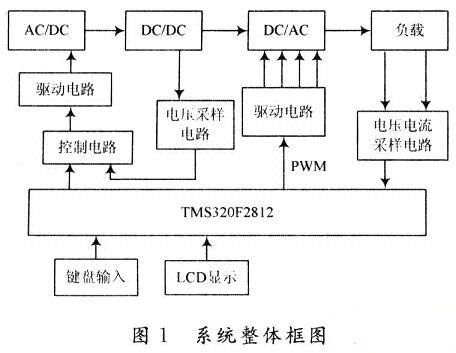
基于該芯片的逆變電源系統(tǒng)框圖如圖1所示。整個(gè)系統(tǒng)由AC/DC,DC/DC,DC/AC,以及濾波電路和其他輔助電路構(gòu)成。其中,DC/AC逆變器部分是整個(gè)系統(tǒng)的重要組成,逆變器采用單相全橋逆變電路,適應(yīng)大功率場(chǎng)合。通過(guò)采樣電路采樣得到的輸出電壓和電流經(jīng)過(guò)DSP的A/D轉(zhuǎn)換器轉(zhuǎn)換成數(shù)字信號(hào),作為數(shù)字控制器的反饋信號(hào),經(jīng)與給定輸出信號(hào)比較后,再經(jīng)過(guò)控制算法調(diào)節(jié)器和脈寬調(diào)制器得到SPWM波控制IGBT功率管的通斷,從而改變輸出電壓的值,使其與給定輸入電壓相等。給定參考電壓由軟件方式實(shí)現(xiàn),因此信號(hào)穩(wěn)定無(wú)溫漂、無(wú)干擾。這種控制方法在負(fù)載變化較快時(shí)仍然能保證輸出電壓不發(fā)生畸變。
2 逆變器控制方案及其參數(shù)設(shè)計(jì)
2.1 逆變器建模及其控制策略研究
如圖2所示,圖中iL為電感電流;iC為電容電流;io為負(fù)載電流;uo為輸出電壓;R為逆變器負(fù)載電阻,VS1~VS4為逆變控制開(kāi)關(guān);r為電路阻尼電阻;L,C組成LC濾波器;E為逆變器輸入直流電源。
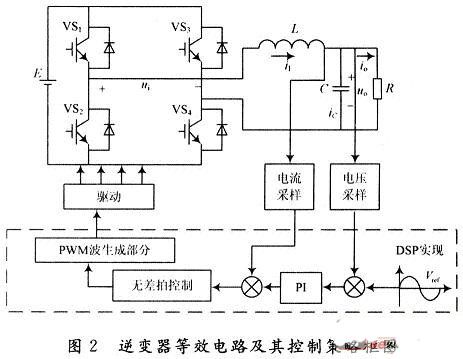
取x(t)=[uo(t)iL(t)]T為狀態(tài)變量,平均電壓ui(£)和負(fù)載電流為系統(tǒng)輸入,則主電路的狀態(tài)方程為:

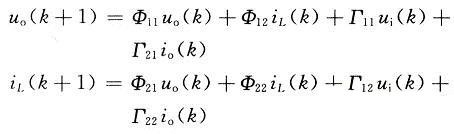
式中:TS為采樣周期;ω0為二階LC濾波器的諧振角頻率。由此得出的電壓電流離散化狀態(tài)方程為:
針對(duì)該逆變器所設(shè)計(jì)研究的控制方法:采用雙閉環(huán)控制算法調(diào)節(jié)系統(tǒng)的動(dòng)靜態(tài)特性,內(nèi)環(huán)采用無(wú)差拍控制方法,是一種能夠瞬時(shí)控制電壓的有效手段,對(duì)負(fù)載具有很強(qiáng)的適應(yīng)能力,尤其對(duì)非線性負(fù)載,輸出波形失真小,可以改善系統(tǒng)的動(dòng)態(tài)響應(yīng)特性;外環(huán)采用瞬時(shí)值的數(shù)字PI算法,輸出電壓的瞬時(shí)值信號(hào)直接反饋,與參考正弦電壓比較,使輸出電壓穩(wěn)定在設(shè)定值上,并抑制輸出電壓的畸變。兩種控制算法能互相彌補(bǔ)各自控制上的不足,使系統(tǒng)得到較好的控制效果。
2.2 電流內(nèi)環(huán)
內(nèi)環(huán)采用干擾無(wú)差拍控制策略,結(jié)合離散化狀態(tài)方程和系統(tǒng)主電路圖分析結(jié)果,可以得到無(wú)差拍控制實(shí)現(xiàn)方法為:
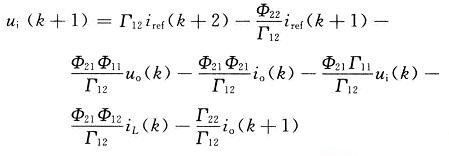
可以通過(guò)采用一個(gè)二階預(yù)估方法對(duì)負(fù)載電流io(k+1)進(jìn)行預(yù)估有:
而iref(k+1)可從外環(huán)控制算法中得出。
2.3 電壓外環(huán)
電壓外環(huán)采用增量式PI算法,其差分方程可以表示為:

PI調(diào)節(jié)器性能的好壞取決于KP,KI的選取。PI參數(shù)可以從理論上算出,但是由于系統(tǒng)參數(shù)的擾動(dòng)性,采用仿真調(diào)試的方法來(lái)確定具有更實(shí)際的價(jià)值。
2.4 PWM波的生成
通過(guò)預(yù)估算法得到正弦參考電流iref(k),再根據(jù)內(nèi)環(huán)控制算法可以算出uI(k),從而得到開(kāi)關(guān)的控制時(shí)間,即PWM的脈沖時(shí)間,從kTS~(k+1)TS的采樣間隔內(nèi),IGBT的導(dǎo)通時(shí)間為:
得到導(dǎo)通時(shí)間后,要進(jìn)一步確定DSP中PWM輸出寄存器的值。從而使DSP實(shí)現(xiàn)了對(duì)IGBT的通斷時(shí)間的控制。
3 逆變器控制電路的仿真研究
搭建逆變器控制方法研究的仿真模型如下:
主電路參數(shù):電感L=10 mH,電容C=20μF,額定阻性負(fù)載R=50 Ω,開(kāi)關(guān)頻率fS=1/Ts=10 kHz,直流電源電壓E=310 V,輸出電壓有效值uo=220 V,頻率f=50 Hz。
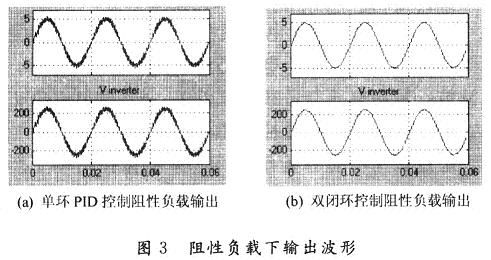
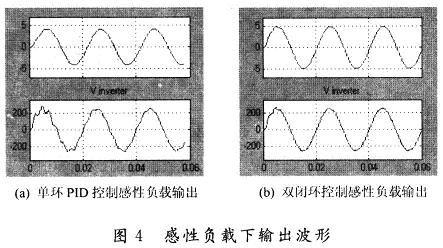
逆變器的主電路由直流穩(wěn)壓電源模塊、全橋開(kāi)關(guān)管模塊、LCR模塊、電壓、電流測(cè)量模塊、信號(hào)輸入模塊等部分組成;電壓外環(huán)采用Simulink模塊庫(kù)中的PI離散控制模塊;電流內(nèi)環(huán)采用S函數(shù)子模塊。仿真結(jié)果如圖3、4所示。
4 結(jié) 語(yǔ)
通過(guò)分析對(duì)在不同負(fù)載和不同環(huán)境下逆變電路的輸出電壓和電流波形,可以肯定該控制方法的可行性和優(yōu)越性。