
摘要:結(jié)合自動裝配教學(xué)生產(chǎn)線中備料機械手的動作控制要求,實現(xiàn)了基于AT89C52單片機的備料機械手控制。先進行了主控芯片和并行接口8255的地址定義,然后進行輸入/輸出接口電路及電機控制電路等系統(tǒng)設(shè)計,并給出了軟件的設(shè)計思路和流程圖。系統(tǒng)采用串行通信方式,利用手動和自動選擇,可分別實現(xiàn)下位機和上位機控制。該系統(tǒng)展現(xiàn)了單片機在工業(yè)控制系統(tǒng)中的綜合應(yīng)用,成為機械手的控制、機電一體化和電氣自動化專業(yè)學(xué)生的綜合實驗實訓(xùn)的又一平臺。
關(guān)鍵詞:機械手;控制要求;AT89C52控制系統(tǒng);I/O接口;電機控制
0 引言
為滿足機電一體化專業(yè)的實驗實訓(xùn)需要,我校2003年購置了機電一體化自動裝配教學(xué)系統(tǒng)。該系統(tǒng)是一套完整、靈活、模塊化、易擴展的教學(xué)實訓(xùn)系統(tǒng),包含多種機械、氣壓傳動方式,模擬現(xiàn)代化裝配過程的柔性生產(chǎn)系統(tǒng)。該系統(tǒng)主要采用PLC控制,展現(xiàn)了實際生產(chǎn)中的傳感器檢測、電氣控制、組態(tài)控制、工業(yè)總線控制等技術(shù)應(yīng)用。學(xué)生可以借助該系統(tǒng),學(xué)習(xí)理解機械傳動、液壓與氣動、電氣傳動與PLC控制、工業(yè)現(xiàn)場總線、傳感器及多種技術(shù)的綜合應(yīng)用。但隨著技術(shù)的發(fā)展,基于單片機的控制系統(tǒng)也日益成為工業(yè)現(xiàn)場控制的又一主要形式,因此,在原機械手結(jié)構(gòu)、氣動系統(tǒng)、傳感器和電機控制電路的基礎(chǔ)上,設(shè)計另外的單片機控制系統(tǒng),實現(xiàn)對機械手的控制,以此促進學(xué)生對單片機在工業(yè)生產(chǎn)上的應(yīng)用的感性認識、培養(yǎng)其單片機系統(tǒng)的設(shè)計、綜合分析與故障診斷與排除的能力就日顯迫切。
目前市售的單片機產(chǎn)品繁多,功能各異,而AT89C52為較為常見的、性價比較高的一款單片機,并可實現(xiàn)在線燒結(jié)編程,使用方便。為不失一般性,機械手的單片機控制系統(tǒng)即以該芯片為控制核心,進行了接口擴展,軟件設(shè)計,并設(shè)計了相應(yīng)的接口電路及外部電路。
1 備料機械手單元
機電一體化自動裝配教學(xué)生產(chǎn)線模擬了一個工件在工業(yè)裝配線的運行過程,分為備料、加蓋、模擬噴漆、烘干和通風、集中檢測、分揀、升降電梯、多層貨架等8個模塊,其中備料、加蓋和分檢單元采用機械手實現(xiàn)動作要求。整個生產(chǎn)線的控制由各單元控制模塊和一個總
控平臺構(gòu)成,可分別實現(xiàn)手動和自動運行,自動時用Profibus總線連接總控和各分站的通信,實現(xiàn)自動裝配。
備料機械手單元的作用是將放在工件平臺上的工件主體搬運到下料單元的料斗中。
運動方式包括:機械手臂的上、下(用上、下動作的雙作用氣缸);工件的吸放(氣缸桿頂端裝有電磁鐵);機械手回轉(zhuǎn)90°(直流電機經(jīng)減速機構(gòu)內(nèi)齒輪傳動機構(gòu)帶動機械手回轉(zhuǎn));機械手臂的抬起和降落(直流電機經(jīng)減速機構(gòu)后驅(qū)動齒條和齒輪機構(gòu)經(jīng)杠桿機構(gòu)抬起工件);工件的前進和后退(右移和左移也是直流電機經(jīng)減速機構(gòu)后驅(qū)動齒輪齒條使整個機械手移動),該單元使用PLC驅(qū)動6個繼電器(實現(xiàn)3個直流電機的正、反轉(zhuǎn)控制),驅(qū)動電磁閥控制雙作用氣缸和直流電磁鐵實現(xiàn)上述運動的控制,位置的檢測以微動開關(guān)、舌簧繼電器、光電檢測開關(guān)實現(xiàn)。該單元的控制臺可以進行手動、自動、急停等功能控制。
該機械化手相當于具有5自由度的機械手,通過調(diào)整限位開關(guān)或傳感器的位置,實現(xiàn)機械手的位置控制。
1.1 備料機械手的動作控制要求
(1)置工件與工件檢測平臺后,備料檢測傳感器檢測到工件,在手動情況下,按下啟動按鈕,備料機械手開始準備工作,延時1 s后,止動氣缸下移,同時直流電磁吸鐵得電。
(2)止動氣缸下移到位后,氣缸上的磁感應(yīng)傳感器得到信號,直流電磁吸鐵將工件吸起來,止動氣缸上移到位(復(fù)位),氣缸上的另一磁感應(yīng)傳感器得到信號,進行下一步工作。
(3)止動氣缸復(fù)位后,正行電機正轉(zhuǎn),使備料機械手轉(zhuǎn)向底盤傳送帶方向,正轉(zhuǎn)到位信號由轉(zhuǎn)盤的檔塊碰撞微動開關(guān)發(fā)出,并將信號傳送到PLC。
(4)正行電機正轉(zhuǎn)到位后,上行電機得電,機械手提升工件向上移動,當杠桿機構(gòu)的撞塊碰到上行到位微動開關(guān)時,上行完畢。
(5)上行到位后,PLC控制右行電機,使機械手向右移動,由機械手撞塊碰撞底盤傳送帶內(nèi)外側(cè)的右行到位微動開關(guān),右行結(jié)束,這時機械手的電磁鐵已經(jīng)將工件搬運到下一工作站料斗的上方。
(6)止動氣缸再次下移,將工件準確放到料斗內(nèi)側(cè)的齒形槽內(nèi),直流電磁斷電。
(7)止動氣缸復(fù)位,機械手左行,下降、回轉(zhuǎn)到位,最后止動氣缸上限位,回轉(zhuǎn)復(fù)位、左行復(fù)位,這就是備料機械手的初始位置。
(8)備料機械手因為某種原因,急停后上電啟動后應(yīng)回到初始位置。
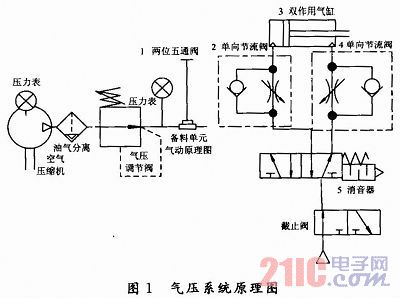
1.2 氣動系統(tǒng)
圖1是教學(xué)生產(chǎn)線氣壓系統(tǒng)和備料單元氣壓支路原理圖。空氣壓縮機將大氣壓縮后,通過油氣分離凈化干燥后,通過氣壓調(diào)節(jié)閥調(diào)整到0.4~0.6 MPa的壓力,通過干路氣管通到各個支路。備料機械手單元來自干路氣壓通過分支頭后,經(jīng)過手動截止閥控制,再通過兩位五通電磁閥控制,YA1不通電左位時,經(jīng)過單向節(jié)流閥調(diào)節(jié)氣流控制流量,使氣缸復(fù)位,止動氣缸下降時,YA1得電,電磁閥右位通(如圖示位置),通過單向節(jié)流閥4推動氣缸下降。回氣回路加有消音器以防止閥的回氣引起的噪聲。
2 AT89C52控制系統(tǒng)設(shè)計
2.1 接口與內(nèi)存地址的映像關(guān)系
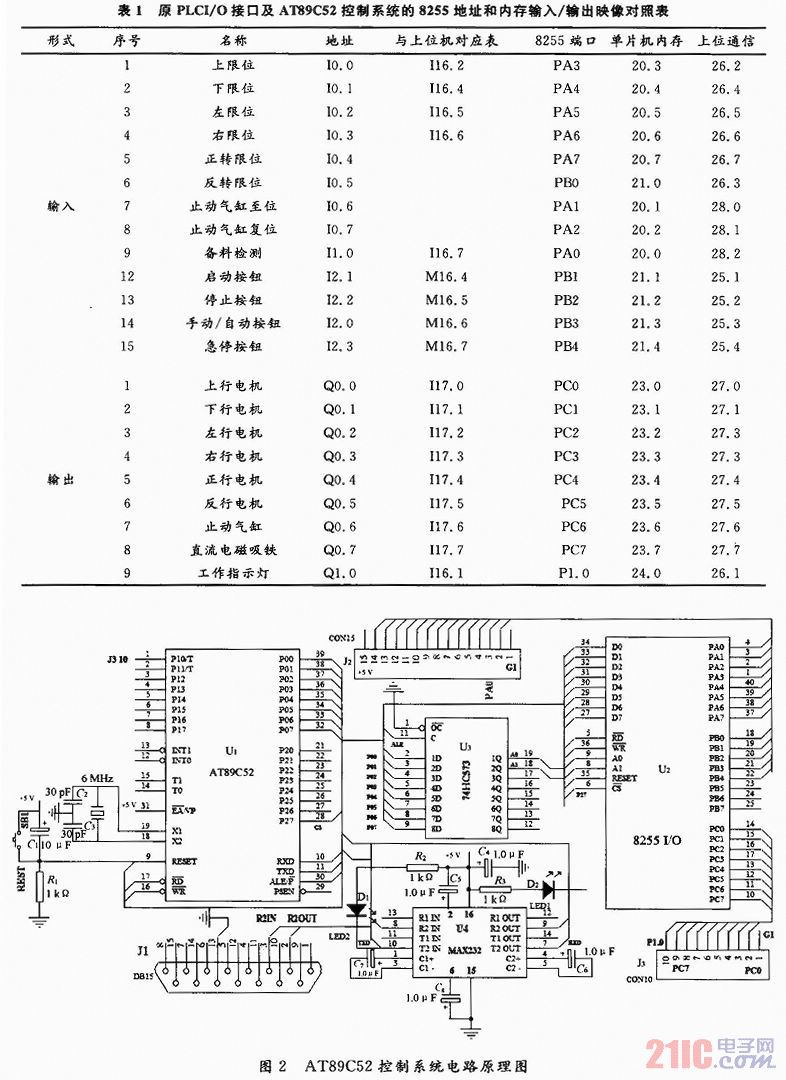
備料單元PLC-I/O接口與AT89C52控制系統(tǒng)的并行8255地址及內(nèi)存輸入/輸出映像關(guān)系見表1。
2.2 AT89C52控制系統(tǒng)電路設(shè)計
從I/O接口表可知,該備料機械手的輸入有15點,輸出有9點,所以系統(tǒng)要擴展1片8255,并定義PA口,PB口為輸入,PC口為輸出,利用P1.0作為輸出接口作為輸出指示燈。考慮到上位機的控制需要,設(shè)計了由MAX 232組成的串行通信電路,AT89C52內(nèi)部有8 KB的ROM,地址范圍由0000H~1FFFH,可以滿足控制的需要,故外部不再擴充存儲器。電路如圖2所示。設(shè)計8255的/CS、P2.7端為邏輯零,其他未用到的地址線為邏輯1,則8255的PA口地址為7FFC,8255的PB口地址為7FFD,8255的PC口地址為7FFE,8255的控制寄存器地址為7FFF。
2.3 系統(tǒng)I/O接口電路設(shè)計
原系統(tǒng)由PLC作為控制器,故其信號均為24 V直流電壓信號。為適應(yīng)單片機控制系統(tǒng)的需要,需將機械手側(cè)的24 V信號轉(zhuǎn)換為單片機能夠接受的TTL電平,同時能夠消除傳感器、開關(guān)的突動干擾的影響。所以設(shè)置光電隔離器件實現(xiàn)電平轉(zhuǎn)換和消除干擾。光電隔離器件采用TLP521-4,輸入由LED指示電路反映輸入的實際情況,以檢測輸入故障。輸入接口電路如圖3所示。
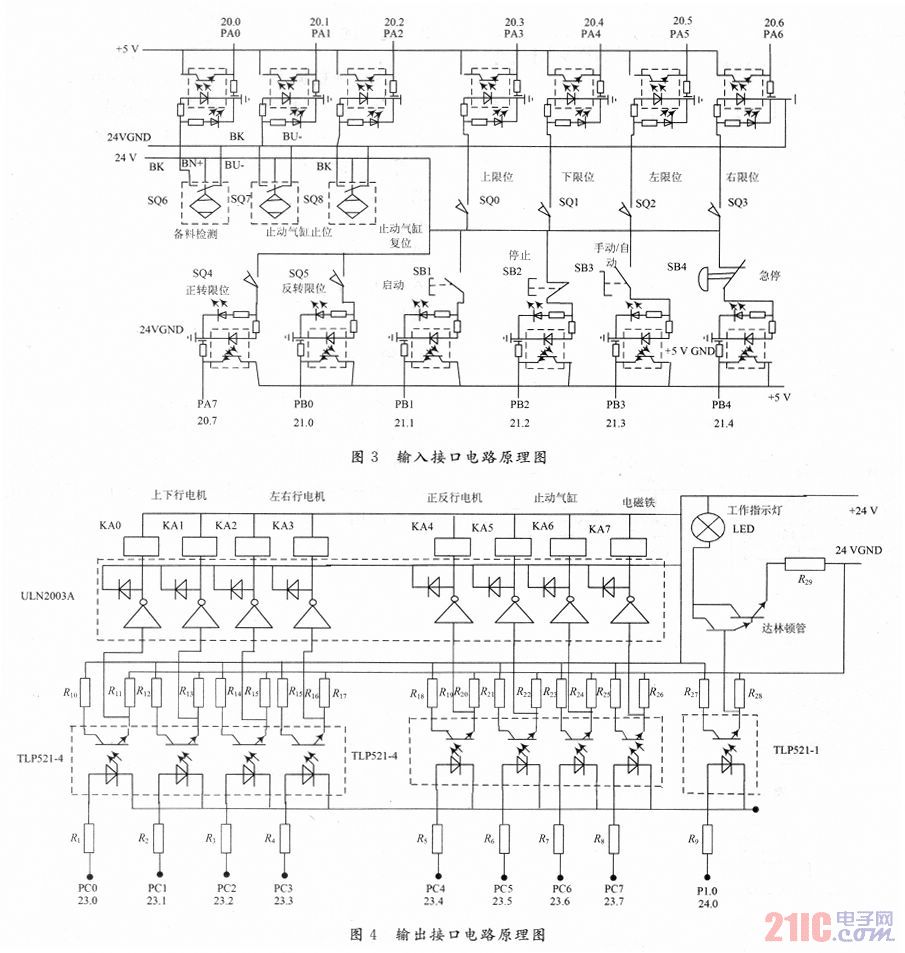
輸出接口電路的作用主要是進行功率驅(qū)動和消除干擾和電平轉(zhuǎn)換,電路如圖4所示,由TLP521-4進行光電隔離,將計算機與機械手電路側(cè)隔離,經(jīng)功率驅(qū)動集成電路ULN2003A和達林頓晶體管驅(qū)動后,分別驅(qū)動繼電器或指示燈,實現(xiàn)機械手的動作控制。
2.4 直流電機驅(qū)動電路設(shè)計
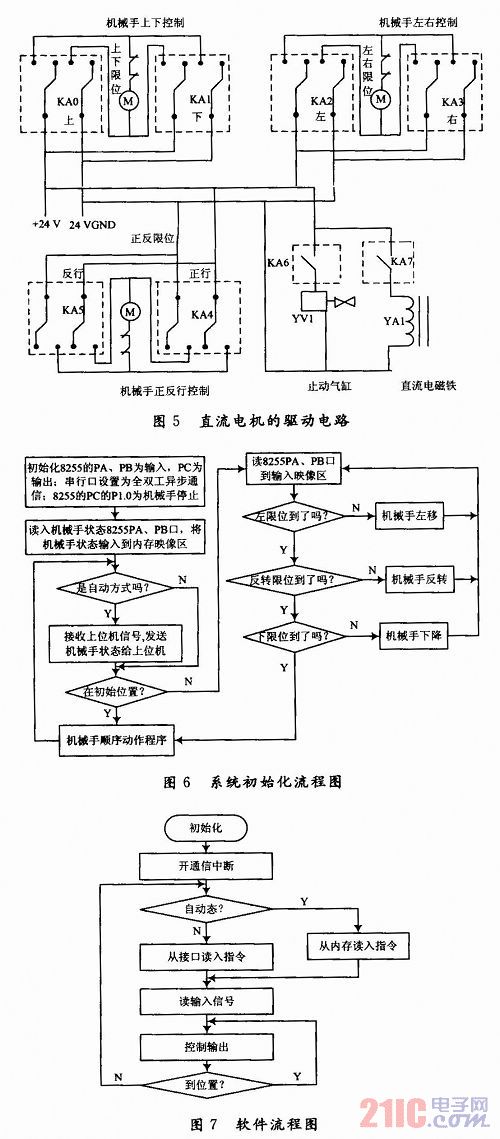
直流電機的工作電流比較大,輸出接口電路不能直接驅(qū)動,需要用繼電器進行功率放大,即先驅(qū)動繼電器線圈,再由繼電器觸點來實現(xiàn)電機的24 V供電。對于永磁式直流電機,可利用改變電樞繞組的電流方向?qū)崿F(xiàn)電機的正、反轉(zhuǎn)和停的控制,如機械手上升,KA0通電、KA1斷電,這時24 V通過KA0常開(閉合)通過上下限位開關(guān)到電機電樞繞組,從另一對常開回到24 V地。機械手下降時KA0斷電,KA1通電,其過程類似于機械手上升,直流電機驅(qū)動電路見圖5所示。電樞回路串聯(lián)了兩個方向的超程限位開關(guān),當由于軟件或其他故障引起限位開關(guān)動作,將切斷電樞回路電源,電機停止,實現(xiàn)了電氣保護。
2.5 軟件設(shè)計
利用串行通信,將目前機械手狀態(tài)(單片機內(nèi)存26H,27H,28H的內(nèi)容)發(fā)送到上位機,并將上位機的命令接受后,存儲到25H單元。
初始化串行通信異步、雙工,8255初始化PA,PB和P1.0為0,機械手處于停止狀態(tài)。
機械手的工作方式分為手動或自動狀態(tài)。手動由本工作站的控制按鈕控制,自動采用串行通信接收上位機命令,并控制本位的機械手動作。若起動后機械手沒有在初始位置,則機械手應(yīng)先回到初始位置,系統(tǒng)初始化見圖6所示。隨后,系統(tǒng)接受指令,按照指令要求運行,程序流程見圖7所示。
因為程序要不停的調(diào)用輸入和輸出程序,故將8255的輸入采樣和輸出編寫專門的子程序:
8255INPUT:MOV DPTR#7FFCH;
MOVX A,@DPTR;
MOV 20H,A
INC DPTR
MOVX A,@DPTR;
MOV 21H,A
RET
8255OUT: MOV DPTR#7FFEH
MOV A,23H
MOVX@DPTR,A
MOOV P1.0,24.0
RET
驅(qū)動機械手動作的電機正轉(zhuǎn)和反轉(zhuǎn)進行了互鎖設(shè)計,以免短路電源。順序動作程序略。
3 調(diào)試
為保證機械手的安全運行,調(diào)試時用開關(guān)模擬機械手的狀態(tài)信號,按機械手的動作控制模擬輸入,觀察輸入接口板的狀態(tài)指示和輸出接口板的繼電器動作情況,待控制功能與機械手的控制要求吻合時,再連接機械手的實際輸入和輸出信號。配備開關(guān)型穩(wěn)壓電源輸出24 V/20 A,5 V/2 A。急停信號要對電源進行控制。設(shè)計一個專門的轉(zhuǎn)接板,將機械手和本位操作臺上的輸入和輸出信號分離,然后輸入/輸出到輸入接口和輸出接口板上,以便于切換PLC和單片機的控制。
4 結(jié)論
通過實驗檢驗,單片機控制系統(tǒng)運行可靠,實現(xiàn)了雙向通信功能,為利用上位機的組態(tài)控制,實現(xiàn)現(xiàn)場再現(xiàn)等提供了極大方便。該系統(tǒng)體現(xiàn)了單片機在工業(yè)生產(chǎn)方面的控制能力,展現(xiàn)了單片機在工業(yè)控制系統(tǒng)中的綜合應(yīng)用,為開展機械手的控制實驗、機電一體化和電氣自動化專業(yè)學(xué)生的綜合實驗實訓(xùn)又建立了一個新平臺。