
現(xiàn)有的單通道低頻RFID閱讀器在組成大規(guī)模應(yīng)用系統(tǒng)時(shí)非常不便,會(huì)使系統(tǒng)累贅、可靠性下降、成本增加。為了解決這些問(wèn)題,有必要探討多通道低頻RFID閱讀器的設(shè)計(jì)方法。
1 閱讀器的組成
圖1為多通道多模式低頻RFID閱讀器的結(jié)構(gòu)框圖。閱讀器包含6個(gè)讀取通道,每個(gè)通道包含一個(gè)EM4095芯片,它們?cè)谕粋€(gè)MCU的程序控制下工作。設(shè)計(jì)6個(gè)通道的目的是組成多種有效的工作模式,便于實(shí)際應(yīng)用。閱讀器每個(gè)通道的解碼均由MCU的程序控制完成,這樣可以大大地簡(jiǎn)化硬件設(shè)計(jì)、降低成本。閱讀器通過(guò)CAN總線或RS485總線與上位機(jī)相連,進(jìn)行數(shù)據(jù)通信,接受工作模式的設(shè)定指令和其他的控制指令,上傳各通道讀取的標(biāo)簽信息和閱讀器本身的工作狀態(tài);同時(shí)也可構(gòu)成集散型系統(tǒng),便于大規(guī)模應(yīng)用。

圖1 多通道多模式低頻RFID閱讀器的結(jié)構(gòu)框圖
2 EM4095芯片的用法
EM4095是瑞士EM Microelectronic公司的一款用于RFID閱讀器的專用芯片。圖2為EM4095的應(yīng)用原理圖。DEMOD_OUT引腳為AM解調(diào)信號(hào)的輸出端;MOD為調(diào)制控制端,低電平時(shí)沒(méi)有調(diào)制,高電平時(shí)100%調(diào)制;RDY/CLK輸出端具有多個(gè)功能指示作用,或作為發(fā)送已準(zhǔn)備好指示,或作為接收同步時(shí)鐘信號(hào)輸出指示。當(dāng)芯片內(nèi)部鎖相環(huán)工作建立,接收電路開(kāi)始工作時(shí),RDY/CLK端會(huì)輸出連續(xù)的與DEMOD_OUT端數(shù)據(jù)信號(hào)同步的時(shí)鐘信號(hào);SHD為高電平時(shí),EM4095進(jìn)入睡眠省電模式,RDY/CLK也被置為低電平。
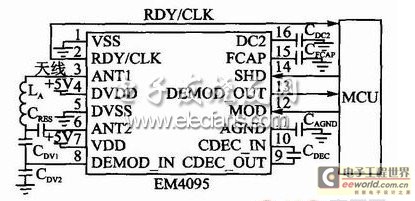
圖2 EM4095的應(yīng)用原理圖
3 數(shù)據(jù)接收解碼方法
由于EM4095只是提供了產(chǎn)生載波與AM調(diào)制解調(diào)功能,因此閱讀器數(shù)據(jù)發(fā)送編碼與數(shù)據(jù)接收解碼須由MCU完成。通常125 kHz的RFID數(shù)據(jù)傳輸速率為2~3.2 kb/s。數(shù)據(jù)發(fā)送編碼相對(duì)簡(jiǎn)單,只需要控制發(fā)送端口定時(shí)輸出指定的數(shù)據(jù)位就可以了。數(shù)據(jù)的接收解碼要復(fù)雜一些,下面以遵循ISO11784/11785標(biāo)準(zhǔn)的數(shù)據(jù)通信協(xié)議為例說(shuō)明采用MCU進(jìn)行數(shù)據(jù)接收解碼的方法。
3.1 標(biāo)簽信息數(shù)據(jù)幀的格式
圖3為RFID標(biāo)簽在收到閱讀器發(fā)送的電磁波信號(hào)后,返回的信息數(shù)據(jù)幀格式。根據(jù)ISO11785標(biāo)準(zhǔn),數(shù)據(jù)幀(共128位)分為4個(gè)段,分別為幀頭段、標(biāo)識(shí)代碼段、CRC校驗(yàn)碼段以及準(zhǔn)備將來(lái)使用的擴(kuò)展預(yù)留段。幀頭段代碼為00 0000 0000 1,包含有10個(gè)“0”。為了防止出現(xiàn)與幀頭相同的代碼,所有后續(xù)碼段每8位數(shù)據(jù)插入1個(gè)控制位“1”。標(biāo)識(shí)代碼段內(nèi)的標(biāo)志位1為附加數(shù)據(jù)塊標(biāo)志,標(biāo)志位2為動(dòng)物標(biāo)志。CRC校驗(yàn)碼段為CCITT 16位CRC校驗(yàn)碼。擴(kuò)展預(yù)留段現(xiàn)在還沒(méi)有使用,統(tǒng)一設(shè)為00000000 1 00000000 1 00000000 1,其中的“1”即控制位。

圖3 RFID標(biāo)簽信息數(shù)據(jù)幀的格式
3.2 標(biāo)簽信息數(shù)據(jù)的編碼
采用MCU進(jìn)行接收數(shù)據(jù)幀解碼的關(guān)鍵步驟是幀頭段的捕獲。圖4為RFID標(biāo)簽回饋給閱讀器的信息比特流的編碼方式。MCU檢測(cè)到EM4095芯片RDY/CLK引腳端產(chǎn)生時(shí)鐘信號(hào)時(shí),進(jìn)入幀頭段的捕獲狀態(tài)。

圖4 標(biāo)簽信息數(shù)據(jù)編碼方式[next]
在沒(méi)有信號(hào)輸入時(shí),EM4095的輸出端DEMOD_OUT為低電平,根據(jù)幀頭的代碼與編碼方式,輸入到MCU的幀頭段信號(hào)波形如圖5所示。考慮到RFID標(biāo)簽的頻率125 kHz會(huì)有一定的誤差,且數(shù)據(jù)傳輸率也不會(huì)精確地為2 kb/s或3.2kb/s,所以幀頭的捕獲包括兩個(gè)方面的含義:一是幀頭段的識(shí)別,即幀頭代碼的判斷;二是波特率的確定,即信號(hào)跳變的時(shí)間間隔△T的測(cè)量。幀頭捕獲的目的是為幀信號(hào)后續(xù)代碼段的檢測(cè)解碼提供依據(jù)。
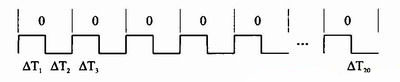
圖5 輸入到MCU的幀頭段信號(hào)波形
3.3 標(biāo)簽信息數(shù)據(jù)的程序控制解碼方法
考慮到數(shù)據(jù)的傳輸率不會(huì)大于3.2 kb/s,根據(jù)圖4所示的數(shù)據(jù)調(diào)制編碼方式可知,信息數(shù)據(jù)輸出端口(如圖2的DEMOD_OUT引腳)的信號(hào)變化頻率不會(huì)大于6.4kHz。在硬件實(shí)現(xiàn)的異步串行通信解碼接口中,通常選擇采樣頻率為信號(hào)變化頻率的16倍、32倍或更高。在這里由MCU程序控制進(jìn)行串行數(shù)據(jù)解碼的方法是:對(duì)接收的編碼信號(hào)脈沖跳變的時(shí)間間隔進(jìn)行測(cè)量。由圖4的編碼方式(曼徹斯特編碼)可知,表示數(shù)碼0的時(shí)間間隔是表示數(shù)碼1的時(shí)間間隔的1/2,因此測(cè)得信號(hào)脈沖跳變的時(shí)間間隔,通過(guò)程序判斷比較就可解碼出數(shù)據(jù)0或1。要測(cè)量信號(hào)脈沖跳變的時(shí)間間隔就需要有參考時(shí)鐘信號(hào),在這里,當(dāng)參考時(shí)鐘信號(hào)頻率為被測(cè)信號(hào)最高頻率的32倍時(shí),其值為204.8 kHz。大多數(shù)MCU的定時(shí)器/計(jì)數(shù)器都能對(duì)這一頻率的信號(hào)進(jìn)行計(jì)數(shù)測(cè)時(shí)。若采用LPC214x的定時(shí)器/計(jì)數(shù)器捕獲功能就可以實(shí)現(xiàn)這一點(diǎn)。
將需要解碼的信號(hào)(圖2的DEMOD_OUT引腳輸出)接入到MCU定時(shí)器的捕獲端口,當(dāng)沒(méi)有接收信號(hào)時(shí),接收端口保持為低電平。當(dāng)RFID閱讀器發(fā)送出閱讀命令后,接收程序準(zhǔn)備就緒,同時(shí)啟動(dòng)定時(shí)器計(jì)數(shù)。一段延時(shí)后接收信號(hào)到來(lái),輸入信號(hào)每次發(fā)生跳變時(shí),捕獲定時(shí)器的計(jì)數(shù)值,讀取并保存。設(shè)第0次跳變的捕獲保存值為T0,第n次跳變的捕獲保存值為Tn,相鄰上次捕獲的保存值為Tn-1,從第1次跳變開(kāi)始,計(jì)算差值△Tn:
△Tn=|Tn-Tn-1|(n≥1)
如果連續(xù)18次以上的差值△T相同(即△T1、~△T18相同),則幀頭段捕獲成功。考慮到接收信號(hào)放大檢波帶來(lái)的誤差以及MCU定時(shí)器/計(jì)數(shù)器存在有計(jì)數(shù)誤差,判定差值相同的依據(jù)為:
|△Tn-△Tn-1|≤2
式中,1≤n≤20,即相互之間的誤差不大于2。
差值的平均值為:
△T=(△T1+△T2+…+△TN)/N(18≤N≤20)。
△T為后續(xù)數(shù)據(jù)段解碼的檢測(cè)周期;如果后續(xù)碼段信號(hào)產(chǎn)生跳變的時(shí)間間隔等于平均值△T,則解碼為數(shù)據(jù)0;如果跳變的時(shí)間間隔值為平均值△T的2倍,則解碼為數(shù)據(jù)1。據(jù)此,就可以對(duì)接收的整個(gè)標(biāo)簽信息數(shù)據(jù)幀進(jìn)行解碼。
4 閱讀器多通道、多模式的用法
閱讀器包含6個(gè)通道,可以根據(jù)應(yīng)用需要配置出幾種典型的工作模式,如6通道輪循工作模式、6通道同步工作模式等。6通道輪循工作模式可用于靜態(tài)(如倉(cāng)儲(chǔ)、圖書館等)物品的監(jiān)管,其輪循的周期時(shí)長(zhǎng)可根據(jù)要求設(shè)置;6通道同步工作模式,可用于每個(gè)通道所對(duì)應(yīng)的位置對(duì)系統(tǒng)時(shí)間響應(yīng)都有嚴(yán)格要求的場(chǎng)合;6通道獨(dú)立工作模式主要針對(duì)一些需求少于6通道的場(chǎng)合,它可以靈活地關(guān)閉或開(kāi)啟其中任意幾個(gè)通道;雙3D工作模式,則是將6通道分成2組,每組3個(gè)通道監(jiān)測(cè)同一個(gè)位置,3個(gè)通道的天線波束指向分別為前后、左右、上下3個(gè)相互垂直的方向(3D),確保進(jìn)入監(jiān)控位置的RFID標(biāo)簽不會(huì)因擺放方向的差異而出現(xiàn)漏讀。另外,這種模式可同時(shí)對(duì)2個(gè)位置進(jìn)行3D監(jiān)測(cè),當(dāng)RFID標(biāo)簽分別通過(guò)這兩個(gè)被監(jiān)測(cè)的位置時(shí),閱讀器能根據(jù)RFID標(biāo)簽信號(hào)出現(xiàn)的時(shí)間先后判斷出RFID標(biāo)簽移動(dòng)的方向。
結(jié)語(yǔ)
設(shè)計(jì)的多通道、多模式低頻RFID閱讀器具有組態(tài)方式靈活、應(yīng)用范圍廣的特點(diǎn),且閱讀器的多通道集中控制可以有效地降低通道之間的串?dāng)_。實(shí)際應(yīng)用表明,多通道、多模式低頻RFID閱讀器具有良好的穩(wěn)定性和可靠性。