
迄今為止的設(shè)計(jì)經(jīng)驗(yàn)主張每臺(tái)逆變器和電機(jī)都擁有專門隸屬于自己的DSP控制器。最近,DSP的處理能力和外圍資源已提升到足以輕松控制兩臺(tái)電機(jī)的程度,甚至還有潛力處理更多電機(jī)。采用單一DSP控制器控 制兩套三相逆變器的初步實(shí)踐已經(jīng)表明此舉可行,樣板中包括實(shí)現(xiàn)雙永磁同步電機(jī)(PMSM)驅(qū)動(dòng)的完整系統(tǒng)及DSP接口。

使用單一DSP控制兩臺(tái)永磁同步電機(jī)(PMSM)的硬件實(shí)驗(yàn)裝置包括兩臺(tái)電機(jī),兩塊逆變板以及一塊單一的D S P 開(kāi)發(fā)板(TMS320F280eZdsp)。
由標(biāo)量控制升級(jí)到矢量控制可以顯著提高電機(jī)運(yùn)行效率,并允許采用更小、更便宜的電機(jī),從而有利于節(jié)能。矢量控制能夠生成適當(dāng)?shù)拇艌?chǎng)矢量,控制電機(jī)的轉(zhuǎn)矩和速度,不過(guò),也需要相當(dāng)強(qiáng)大的處理能力,以實(shí)現(xiàn)為每臺(tái)電機(jī)生成正確脈寬調(diào)制(PWM)輸出所需的控制算法。當(dāng)前,在典型電機(jī)的控制應(yīng)用中,每臺(tái)逆變器需要20到25 MIPS的處理能力,此外,驅(qū)動(dòng)每臺(tái)逆變器還需要一個(gè)單獨(dú)的編碼器接口模塊和六路PWM輸出。
過(guò)去的方法
上述苛刻要求往往意味著每臺(tái)電機(jī)的應(yīng)用系統(tǒng)均需采用一個(gè)單獨(dú)的DSP來(lái)控制,當(dāng)應(yīng)用中只包含單臺(tái)電機(jī)時(shí),問(wèn)題并不突出,然而對(duì)于大多數(shù)多重電機(jī)應(yīng)用而言,就顯得累贅而且昂貴了。典型的多重電機(jī)應(yīng)用包括工程機(jī)械、暖通空調(diào)設(shè)備(HVAC)、汽車以及其他許多應(yīng)用。如今,最先進(jìn)的DSP的處理能力高達(dá)100到150 MIPS,這無(wú)疑提高了以單一DSP控制多臺(tái)電機(jī)的可能性。事實(shí)上,針對(duì)此類應(yīng)用的DSP已經(jīng)開(kāi)發(fā)完成,片內(nèi)具有多組編碼器接口和數(shù)目眾多的PWM輸出。
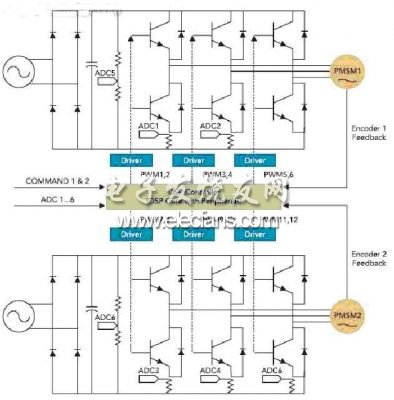
雙驅(qū)動(dòng)電機(jī)控制系統(tǒng)的結(jié)構(gòu)圖給出了來(lái)自每臺(tái)電機(jī)的編碼器信號(hào)輸入和兩套逆變器的各相驅(qū)動(dòng)。
硬件描述
雙電機(jī)控制系統(tǒng)的硬件包括兩臺(tái)三相PMSM電機(jī),每臺(tái)電機(jī)連接著一套三相電壓型PWM逆變器,全部逆變器以單一DSP控制器(Texas Instruments TMS320F2808)分別控制。片內(nèi)模擬數(shù)字轉(zhuǎn)換器記錄各相電流和直流母線電壓信息,以及來(lái)自兩臺(tái)逆變器的其他數(shù)據(jù);內(nèi)置于DSP控制器的編碼器接口模塊接收編碼器反饋信息;片內(nèi)與電力電子相關(guān)的外圍接口為逆變器提供無(wú)縫連接,以有效簡(jiǎn)化整個(gè)系統(tǒng)設(shè)計(jì)。
為生成兩套三相電壓型逆變器所需的信號(hào),硬件裝置采用了六對(duì)PWM輸出。PWM通道的逆變操作頻率為20 kHz,并逐周期刷新PWM調(diào)制所需的比較值。主控平臺(tái)為一塊DSP開(kāi)發(fā)板(TMS320F280eZdsp),正弦換相的八極三相永磁電機(jī)(Applied Motion A0100-103-3-000)采用兩千線編碼器,DSP的片上正交編碼器脈沖(QEP)接口與每臺(tái)電機(jī)的編碼器相連。
軟件開(kāi)發(fā)
采用C代碼編寫(xiě)的模塊化軟件有利于將來(lái)擴(kuò)展為以中斷服務(wù)程序(ISR)為核心的驅(qū)動(dòng)應(yīng)用軟件。由后臺(tái)循環(huán)構(gòu)成的主程序只是簡(jiǎn)單地初始化外圍設(shè)備,包括鎖相環(huán)、看門狗、中斷控制和事件管理器等。其余代碼包括PWM中斷服務(wù)程序等。各自電機(jī)系統(tǒng)的定時(shí)中斷于每個(gè)PWM周期調(diào)用中斷服務(wù)程序。
獨(dú)立控制兩臺(tái)三相PMSM電機(jī)需要實(shí)現(xiàn)兩套磁場(chǎng)控制算法,針對(duì)兩臺(tái)電機(jī)的全部計(jì)算必須在每個(gè)PWM周期之內(nèi)完成,并周而復(fù)始地多重調(diào)用軟件模塊,因此有必要清晰地定義每個(gè)模塊的輸入輸出,以便于在不同系統(tǒng)間實(shí)現(xiàn)模塊重用。所有計(jì)算均采用定點(diǎn)算法以簡(jiǎn)化運(yùn)算要求。
電機(jī)控制算法
著名的Carke-Park變換構(gòu)成了磁場(chǎng)定向控制(FOC)算法,將三相電流矢量由三相靜止坐標(biāo)系變換到兩相旋轉(zhuǎn)坐標(biāo)系中,再由獨(dú)立的比例積分微分(PID)調(diào)節(jié)器分別處理變換后的正交分量,最后PWM開(kāi)關(guān)模式變換器根據(jù)編碼器反饋信息計(jì)算得到的磁通角度將PID調(diào)節(jié)器輸出再度轉(zhuǎn)化回三相靜止坐標(biāo)系中去。
PID模塊控制著PWM占空比,以調(diào)節(jié)施加于電機(jī)的電壓。連接于電機(jī)軸端的光電編碼器輸出正交脈沖, QEP模塊接收該脈沖,以計(jì)算轉(zhuǎn)子的位置和旋轉(zhuǎn)速度。

TMS320F 28XX 的內(nèi)部結(jié)構(gòu)圖表示了外圍接口、外圍總線和片內(nèi)存儲(chǔ)器,其中外圍接口上部的六相PWM接口和兩套QEP 接口使得單一DSP 能夠控制兩臺(tái)電機(jī)。
依據(jù)前面描述的算法,為實(shí)現(xiàn)調(diào)速運(yùn)行,需要以PID調(diào)節(jié)模塊計(jì)算PWM比較寄存器的值。全部算法以20 kHz的頻率運(yùn)行,并于每個(gè)PWM周期刷新PWM占空比。為第二臺(tái)電機(jī)重復(fù)此過(guò)程,可實(shí)現(xiàn)以單一DSP控制器提供雙電機(jī)獨(dú)立驅(qū)動(dòng)的完整控制。
定點(diǎn)算法開(kāi)發(fā)
一種稱為IQMATH的專用定點(diǎn)數(shù)學(xué)函數(shù)庫(kù),可基于DSP硬件和編譯器優(yōu)化算法性能。IQMATH由高度優(yōu)化的高精度數(shù)學(xué)函數(shù)集構(gòu)成,可以用C/C++設(shè)計(jì)將浮點(diǎn)算法無(wú)縫地轉(zhuǎn)化成DSP的定點(diǎn)代碼。IQMATH程序使得以類浮點(diǎn)格式編寫(xiě)定點(diǎn)程序成為可能,該程序還能處理在定點(diǎn)編程中需要額外考慮的飽和及溢出問(wèn)題。而且,IQMATH程序特別適用于需要極高執(zhí)行速度和運(yùn)算精度的計(jì)算密集型實(shí)時(shí)應(yīng)用。
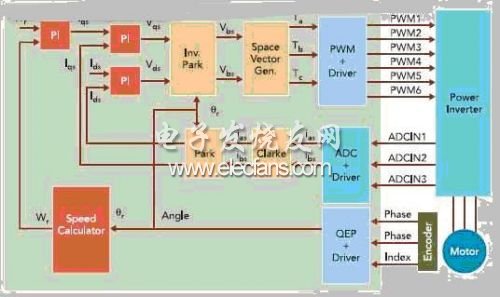
每臺(tái)電機(jī)的磁場(chǎng)定向控制都采用一組正交編碼器脈沖和Clarke-Park 變換
根據(jù)使用過(guò)的軟件模塊定義可以創(chuàng)建一種特殊數(shù)據(jù)結(jié)構(gòu),使多次重用軟件模塊成為可能,從而可以按照實(shí)現(xiàn)整個(gè)系統(tǒng)所需要的次數(shù)重復(fù)引用目標(biāo)模塊。在雙驅(qū)動(dòng)系統(tǒng)中,簡(jiǎn)單地定義適當(dāng)?shù)臄?shù)據(jù)類型,就可以將所需模塊引用兩次。實(shí)現(xiàn)雙重算法大約會(huì)消耗DSP片內(nèi)63 kW Flash和18 kW RAM內(nèi)存資源中的4 kW程序空間和0.5kW數(shù)據(jù)空間。
多重逆變控制器則需要為每臺(tái)電機(jī)配置專用的故障檢測(cè)信號(hào)接收引腳。
在多重逆變驅(qū)動(dòng)中,故障管理需要重點(diǎn)考慮。操控單一逆變器的傳統(tǒng)DSP控制器通常只是包含單一的故障管理系統(tǒng),出現(xiàn)故障時(shí)就關(guān)斷控制器。多重逆變控制器則需要為每臺(tái)電機(jī)配置專用的故障檢測(cè)信號(hào)接收引腳,例如:可能需要六個(gè)引腳分別對(duì)應(yīng)兩臺(tái)電機(jī)中每臺(tái)的過(guò)壓、過(guò)流和過(guò)溫傳感器。單一電機(jī)的三個(gè)引腳共同連接到一個(gè)邏輯或模塊上,當(dāng)任何一個(gè)引腳出現(xiàn)由低到高或由高到低的變化時(shí),就產(chǎn)生一個(gè)中斷,關(guān)斷相應(yīng)電機(jī)的PWM輸出。
試驗(yàn)結(jié)果
雙電機(jī)驅(qū)動(dòng)系統(tǒng)的軟件開(kāi)發(fā)是分階段完成的,可以顯著縮減調(diào)試所需要的時(shí)間。新一代DSP控制器致力于解決成本問(wèn)題,通過(guò)提供更強(qiáng)大的處理能力,多重編碼器接口以及數(shù)量眾多的PWM輸出,可以滿足兩臺(tái)甚至更多電機(jī)的控制需要。DSP內(nèi)核結(jié)合必要的外圍接口可以簡(jiǎn)化設(shè)計(jì)過(guò)程,并為實(shí)現(xiàn)附加驅(qū)動(dòng)特性提供選擇余地。如果單一DSP控制器有能力操作多達(dá)四套三相電壓型逆變器,就可以徹底降低使用多臺(tái)電機(jī)的機(jī)械和運(yùn)輸設(shè)備的成本和占地空間。