
引言
枕式包裝機(jī)又稱接縫式裹包機(jī),是一種臥式三面封口,自動(dòng)完成制袋、填充、封口、切斷、成品排除等工序的包裝設(shè)備,實(shí)際應(yīng)用中,與相應(yīng)衍生機(jī)種、輔助機(jī)種相配合,能實(shí)現(xiàn)食品、日用化工、醫(yī)藥等行業(yè)自動(dòng)化生產(chǎn)線的流水包裝。適應(yīng)的包裝物為一般塊狀、筒狀規(guī)則物品,無規(guī)則異形物品,如:餅干、蛋糕、化妝品、紙巾等。包裝成品的形式有單件包裝、集合包裝、帶托盤包裝、無托盤集合包裝等。
傳統(tǒng)的枕式包裝機(jī)橫封刀的運(yùn)動(dòng)曲線是由機(jī)械的凸輪來實(shí)現(xiàn)的,機(jī)械加工、安裝復(fù)雜,運(yùn)行噪音大,效率低;如果使用伺服系統(tǒng)來實(shí)現(xiàn)電子凸輪功能,對于機(jī)械安裝、運(yùn)行效率會有一定的提高。本文詳細(xì)介紹BWS的伺服控制系統(tǒng):BWS-BBR輪切伺服控制器,BWS-BH系列異步伺服電機(jī)在包裝機(jī)中實(shí)現(xiàn)電子凸輪的應(yīng)用。
1. 枕式包裝機(jī)的工藝簡介
枕式包裝機(jī)的送膜和進(jìn)料是同步進(jìn)行的,由色標(biāo)檢測和接近開關(guān)分別對送膜和送料的位置進(jìn)行檢測,薄膜經(jīng)成型器成型后變?yōu)橥材ぃ⑦M(jìn)行縱向熱封,同時(shí)物料被送進(jìn)筒膜內(nèi),一起向前經(jīng)過橫封橫切部位,由回轉(zhuǎn)式或往復(fù)式的橫封橫切刀對筒膜進(jìn)行橫向封切,輸出包裝成品,具體工藝流程圖和工藝結(jié)構(gòu)圖分別參照圖1、圖2:
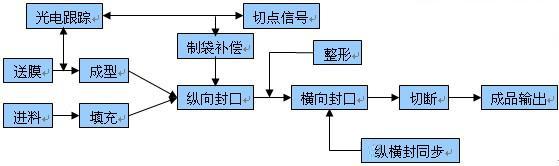
圖1 枕包機(jī)工藝流程圖

圖2 枕包機(jī)工藝結(jié)構(gòu)圖
2. 枕式包裝機(jī)自動(dòng)化程度的發(fā)展
隨著食品包裝行業(yè)的飛速發(fā)展,對類似枕包機(jī)這樣的機(jī)械提出的要求是提高包裝速度與精度,全面包裝品規(guī)格,操作趨于人性化以及售后維護(hù)成本降低。根據(jù)枕包機(jī)的工藝不難看出,其控制重點(diǎn)在于送料、送膜以及橫封橫切軸三軸的配合,因此從第一代枕包機(jī)發(fā)展至今,主要就是對這三軸的控制進(jìn)行改進(jìn)以滿足行業(yè)不斷提升的要求,從低端到高端、從機(jī)械控制為主到電氣控制為主,枕包機(jī)控制的發(fā)展主要經(jīng)歷了以下幾個(gè)階段:
階段一:單變頻
使用一臺變頻器加一臺交流電機(jī)來工作,為了成比例的同時(shí)帶動(dòng)橫封刀(加輸送機(jī))跟包裝膜,需要一臺無極變速箱來根據(jù)不同的膜長調(diào)節(jié)膜軸的速度。從而實(shí)現(xiàn)了兩路速度的輸出,但是無極變速箱會隨著使用時(shí)間的增長出現(xiàn)磨損影響使用精度,因此有他的局限性。橫封刀的運(yùn)行曲線是由機(jī)械凸輪來實(shí)現(xiàn)的,因此機(jī)械結(jié)構(gòu)復(fù)雜,傳動(dòng)機(jī)構(gòu)多。
階段二:單變頻+單伺服
使用一臺變頻驅(qū)動(dòng)橫封刀(加輸送機(jī)),一臺伺服驅(qū)動(dòng)包裝膜,取消了無極變速箱。各部分運(yùn)行獨(dú)立,由PLC控制器協(xié)調(diào)兩部分速度。橫封刀運(yùn)動(dòng)軌跡仍有機(jī)械凸輪實(shí)現(xiàn)。
階段三:雙伺服
原理同單伺服+單變頻,但其控制精度進(jìn)一步提高。
階段四(目前最先進(jìn)的控制方式,本文介紹重點(diǎn)):三伺服
三個(gè)伺服分別驅(qū)動(dòng)橫封刀、包裝膜、供料輸送機(jī),橫封刀的運(yùn)行軌跡完全有伺服來實(shí)現(xiàn),取消機(jī)械凸輪,簡化了機(jī)械結(jié)構(gòu)。三部分的運(yùn)行速度需要有高性能的控制器來控制,因此對于控制器的要求比較高,經(jīng)過試驗(yàn)的BWS的伺服控制系統(tǒng):BWS-BBR輪切伺服控制器,BWS-BH系列異步伺服電機(jī)能完成這項(xiàng)功能,并且能提高包裝速度速度。
3. 三伺服枕式包裝機(jī)的詳細(xì)工藝及控制要求
三伺服枕包機(jī)是在雙伺服枕包機(jī)基礎(chǔ)上開發(fā)的一種高端枕式包裝機(jī),其技術(shù)核心就是用運(yùn)動(dòng)控制器中的電子凸輪功能替代原先的機(jī)械凸輪,完成機(jī)器中橫封橫切與拉膜牽引以及送料的配合,要求橫切的位置能精確地定位在包裝袋的色標(biāo)上,誤差范圍應(yīng)小于±2.5mm(根據(jù)色標(biāo)寬度定),速度一般能達(dá)到200包/分鐘。
3.1 機(jī)器的啟動(dòng)檢測定位
由于在機(jī)器的整個(gè)運(yùn)行過程中保持送膜、送料、橫封橫切軸的位置準(zhǔn)確非常重要,軸與軸之間按照包裝物規(guī)格的不同有不同的位置對應(yīng)點(diǎn),因此在機(jī)器啟動(dòng)時(shí)就因?qū)⑷S的位置進(jìn)行校準(zhǔn),找到位置對應(yīng)點(diǎn)以便機(jī)器正常運(yùn)行時(shí)按照對應(yīng)點(diǎn)進(jìn)行檢測糾偏。
三軸的偏差檢測通過不同的傳感器進(jìn)行:
送膜軸:膜的色標(biāo)位置通過色標(biāo)傳感器和伺服驅(qū)動(dòng)器的編碼器分頻進(jìn)行檢測。
送料軸:輸送帶的位置通過安裝在輸送帶的接近開關(guān)和輸送帶伺服驅(qū)動(dòng)器的編碼器分頻信號位置檢測。
橫封橫切軸:橫封刀位置的檢測通過安裝在橫封刀上的接近開關(guān)和設(shè)定的橫封刀每轉(zhuǎn)的脈沖數(shù)進(jìn)行檢測。
機(jī)器啟動(dòng)時(shí)的檢測定位流程如圖3:
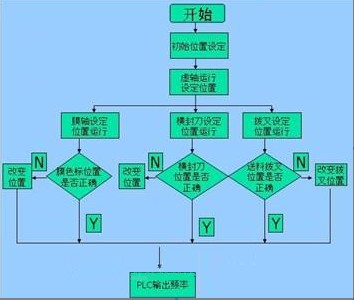
圖3 機(jī)器啟動(dòng)時(shí)三軸的檢測定位流程
3.2 機(jī)器運(yùn)行時(shí)的工藝及控制
啟動(dòng)檢測定位完成后,機(jī)器將進(jìn)入正常運(yùn)行狀態(tài),其控制重點(diǎn)仍在于三軸的配合運(yùn)行,工藝結(jié)構(gòu)及控制圖如圖4:
 圖4 三伺服枕式包裝機(jī)的工藝結(jié)構(gòu)及控制圖
圖4 三伺服枕式包裝機(jī)的工藝結(jié)構(gòu)及控制圖
圖中所標(biāo)的三軸的功能及控制要求分別為:
橫封橫切軸:
切割包裝膜,把每包包裝物分離,并且熱封包裝口, 由伺服電機(jī)驅(qū)動(dòng)一對帶刀導(dǎo)輥旋轉(zhuǎn)對包裝物進(jìn)行橫封橫切,在橫封軸旋轉(zhuǎn)一周的過程中,當(dāng)轉(zhuǎn)到橫封過程的角度時(shí),橫封軸必須與主軸保持同步,當(dāng)轉(zhuǎn)到其他角度時(shí),橫封軸的速度需要改變,橫封的周期時(shí)間與主傳送帶送入一個(gè)包裝物品的時(shí)間相同。
在這里,我們將進(jìn)行橫封過程的角度稱為同步角,同步角的大小根據(jù)機(jī)械結(jié)構(gòu)而定,目前使用最多的角度大小是66°左右。橫封軸轉(zhuǎn)到同步角時(shí),必須與送料軸保持速度同步,而轉(zhuǎn)到其它角度時(shí),需要加速還是減速,取決于橫封軸固有長度與產(chǎn)品長度之間的大小關(guān)系,固有長度的定義如圖5所示:
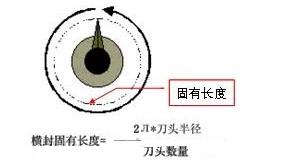
圖5 固有長度的定義
根據(jù)固有長度與產(chǎn)品長度之間的關(guān)系,橫封軸轉(zhuǎn)到同步角以外的角度時(shí)加減速控制要求入圖6所示:

圖6 橫封橫切軸控制速度要求
送膜軸:
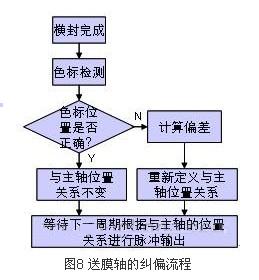
帶動(dòng)包裝膜,夾運(yùn),縱封軸,使包裝膜與包裝物同步,當(dāng)包裝薄膜上需要色標(biāo)定位時(shí),必須在送膜軸的控制中加入糾偏,以防止滑差導(dǎo)致的累計(jì)誤差,保證橫切位置準(zhǔn)確如圖7:

圖7 正確的橫切位置
送膜軸的糾偏流程如圖8所示:
送料軸:
按照一定的速度帶動(dòng)包裝物,把包裝物送入包裝膜中,物料間的間隔距離是由傳送帶上的檔格分開的,可以保證物料被送入包裝膜時(shí)位置的準(zhǔn)確性。但長時(shí)間連續(xù)運(yùn)轉(zhuǎn)可能會因?yàn)闄C(jī)械損耗導(dǎo)致偏差,因此送料軸也需要定位信號檢測進(jìn)行實(shí)時(shí)糾偏,其運(yùn)動(dòng)控制及糾偏的模式與送膜軸幾乎一致,只是檢測定位為信號采用了接近開關(guān),與主軸同步跟隨的參數(shù)也會有所不同。
4. BWS的伺服控制系統(tǒng):BWS-BBR輪切伺服控制器,BWS-BH系列異步伺服電機(jī)的介紹以及在三伺服枕包機(jī)中的應(yīng)用
4.1BWS的伺服控制系統(tǒng):BWS-BBR輪切伺服控制器,BWS-BH系列異步伺服電機(jī) 功能及特點(diǎn)描述
BWS-BBR系列是BWS伺服的飛剪型運(yùn)動(dòng)控制器,其特點(diǎn)就是可以進(jìn)行靈活、快速的運(yùn)動(dòng)控制,適合需要8軸以下伺服控制且同步協(xié)調(diào)或跟隨要求高的包裝機(jī)械,如:多伺服枕包機(jī)、連續(xù)式立包機(jī)、瓦楞紙生產(chǎn)線的送紙機(jī)構(gòu)、全伺服臥式包裝機(jī)等。
BWS-BBR系列可實(shí)現(xiàn)的控制功能如表1所示:
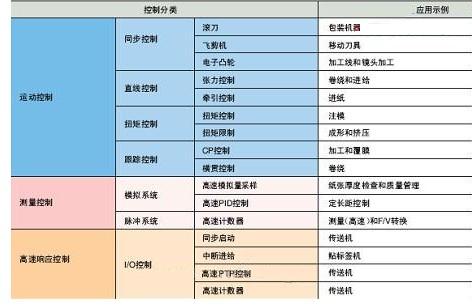
表1 BWS-BBR的控制功能
BWS-BBR的性能特點(diǎn)有:
——根據(jù)并列分散處理性系統(tǒng),從2軸到最大8軸穩(wěn)定的運(yùn)動(dòng)控制周期(例:0.5~2ms);
——內(nèi)置直接控制脈沖輸入輸出/模擬量輸入輸出的高速周期處理型引擎(例:從輸入信息到控制輸出1個(gè)周期0.5ms~2ms);
——軸控制間的控制周期的同步化、高速脈沖起動(dòng)(最高25μs~)、高速模擬量輸入輸出(40μs)、高速計(jì)數(shù)器自鎖(30 μs)、高速浮動(dòng)小數(shù)點(diǎn)演算等;
——模塊化構(gòu)造,可將枕包機(jī)中的理料、飛剪等環(huán)節(jié)程序模塊化。
4.2 三伺服枕式包裝機(jī)的BWS伺服系統(tǒng)方案
對于三伺服枕式包裝機(jī),BWS-BBR是一款非常合適的運(yùn)動(dòng)控制器,配合BWS伺服的整套系統(tǒng)產(chǎn)品,構(gòu)成一套完善的控制系統(tǒng)
4.3 控制系統(tǒng)的關(guān)鍵點(diǎn)
4.3.1 主軸
如上所述,在三伺服滾刀式枕包機(jī)中,軸和軸之間的動(dòng)作需要保持同步或相互協(xié)調(diào),因此就需要定義一根軸作為主軸,其余軸都以它為參照,進(jìn)行同步跟隨或凸輪定位。
主軸可以用實(shí)際存在的三根軸中的一根來定義,也可以用虛軸來定義,定義成虛軸的優(yōu)勢在于可以省去控制器對主軸位置的判斷處理時(shí)間。
由于BWS-BBR支持虛軸功能,因此在這里我們定義一根虛軸為主軸。
本文中的虛軸實(shí)際上使用了一個(gè)MMP模塊的實(shí)際脈沖輸出通道(脈沖輸出2),設(shè)置方式如圖10:
 圖10 MMP模塊設(shè)置圖
圖10 MMP模塊設(shè)置圖
操作模式為絕對脈沖(環(huán)形模式),循環(huán)最大計(jì)數(shù):30000。使用SPED指令直接輸出脈沖每到脈沖值到30000時(shí)自動(dòng)清零。也就是每發(fā)送30000個(gè)脈沖相當(dāng)于包裝一個(gè)包裝物,可以根據(jù)包裝速度計(jì)算出發(fā)送的脈沖頻率。
4.3.2 橫封橫切軸的位置控制
由于本設(shè)備使用電子凸輪代替了機(jī)械凸輪結(jié)構(gòu),其速度分為兩段速,因此采用APR指令與PULS指令結(jié)合應(yīng)用的方式對橫封橫切軸進(jìn)行控制。
首先計(jì)算出橫封切刀的運(yùn)行曲線跟虛軸脈沖的對應(yīng)關(guān)系,對應(yīng)關(guān)系如圖11所示:
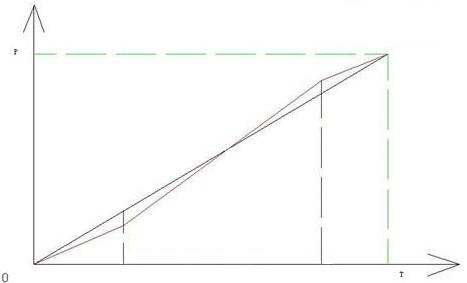
圖11 橫封橫切軸與虛擬軸的對應(yīng)關(guān)系
由于BWS-BBR傳承了BWS伺服PLC的功能塊及ST語言編程功能,因此在這里計(jì)算對應(yīng)關(guān)系的算式可以用ST語言執(zhí)行,并組成功能塊如圖12所示:

圖12橫封切刀與虛軸對應(yīng)關(guān)系計(jì)算
計(jì)算出對應(yīng)關(guān)系后,將對應(yīng)關(guān)系得數(shù)據(jù)輸入APR指令的CAM表如圖13,再由APR指令根據(jù)虛擬軸的實(shí)時(shí)位置信息求出橫封橫切軸的位置,如圖14:
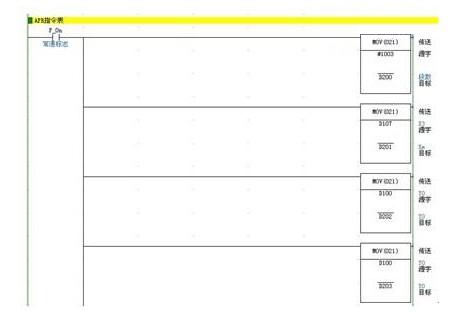
圖13 APR指令表的制作

圖14 APR指令執(zhí)行
由于BWS-BBR中的PULS指令經(jīng)過設(shè)置只需要給定絕對位置值就會自動(dòng)計(jì)算出輸出頻率控制伺服系統(tǒng),因此最后只需將APR指令中橫封橫切刀的位置地址作為PULS指令的目標(biāo)位置,即可完成橫封橫切軸的凸輪控制,如圖15:

圖15 PULS指令執(zhí)行
4.3.3 送膜軸的位置控制
送膜軸的位置控制跟橫封刀的方式相同,只是由于包裝膜的張力的變化會發(fā)生位置的偏差,在工作中必須進(jìn)行修正。
首先計(jì)算出送膜軸運(yùn)行給定的袋長需要的脈沖數(shù),然后與虛軸的脈沖數(shù)進(jìn)行線性對應(yīng),隨時(shí)讀取虛軸的脈沖值,然后根據(jù)線性關(guān)系求出膜軸應(yīng)該對應(yīng)的位置脈沖,通過PULS指令進(jìn)行輸出。
如果出現(xiàn)色標(biāo)偏差可以修改袋長對應(yīng)的脈沖數(shù)的最大值,即修改了線性對應(yīng)關(guān)系,如圖16所示,從而在下一周期中改變膜軸的位置,保證色標(biāo)位置的準(zhǔn)確性。

圖16膜軸與虛軸點(diǎn)數(shù)線性對應(yīng)關(guān)系圖
在這里需要注意的是:檢測出偏差后,需要進(jìn)行判斷色標(biāo)是超前還是滯后(可以在功能塊中計(jì)算,ST語言比較合適),但是超前和滯后會有四種情況,有超前一個(gè)袋長的情況,沒有一個(gè)袋長的情況;滯后一個(gè)袋長的情況,不到一個(gè)袋長的情況,如果不注意處理,就會發(fā)生誤糾偏的情況。在這里,我們?nèi)杂肧T語言編寫功能塊,對此情況進(jìn)行處理,功能塊與ST源代碼如圖17、18所示:

圖17 糾偏判斷功能塊

圖18 糾偏判斷的ST源代碼
4.3.4 送料軸的位置控制
送料軸的位置控制方式與送膜軸的控制方式相同,只是參數(shù)有所變更,在此不再敘述。
4.3.5 其他注意事項(xiàng)
需要注意PULS指令的過零點(diǎn)判斷,如果判斷不好會出現(xiàn)伺服倒轉(zhuǎn)、突然高速運(yùn)行、抖動(dòng)的情況。
另外,如果伺服參數(shù)調(diào)整不對也就是伺服的相應(yīng)不一樣,在高速時(shí)會出現(xiàn)色標(biāo)的偏差,此偏差不易在程序中修正。
5. 結(jié)束語
經(jīng)過測試,設(shè)備可按照客戶原先提出的以下要求正常運(yùn)行:
①提高包裝精度,正常可以達(dá)到120~200包/分;
②減少機(jī)械結(jié)構(gòu),使機(jī)械結(jié)構(gòu)簡單,省去機(jī)械凸輪,易于維修,同時(shí)減少工作噪音;
③使用觸摸屏操作使操作方式人性化;
④使用方便,操作簡單,即便出現(xiàn)故障只要簡單處理就可繼續(xù)運(yùn)行。
⑤系統(tǒng)的穩(wěn)定性,特別重要。
整個(gè)系統(tǒng)設(shè)計(jì)過程中,BWS伺服的BWS-BBR系列的電子凸輪功能、同步總線高速運(yùn)算功能起到了關(guān)鍵作用,使得機(jī)器在保證切刀位置精準(zhǔn)的情況下高速穩(wěn)定地運(yùn)行。
飛剪、電子凸輪、高速、實(shí)時(shí)糾偏等功能,是目前很多OEM機(jī)械尤其是包裝機(jī)械行業(yè)的高端機(jī)型提出的需求,在實(shí)現(xiàn)這些功能的同時(shí),能夠?qū)⒃鹊纳a(chǎn)效率提高2~3倍甚至更多,在不久的將來會成為主流趨勢,而BWS-BBR在三伺服枕包機(jī)中的成功應(yīng)用也證明了BWS伺服在遇到此類機(jī)械的開發(fā)時(shí)有很好的產(chǎn)品對應(yīng),在此領(lǐng)域中的應(yīng)用將會越來越多。
參考文獻(xiàn)
[1] BWS伺服BBR系列輪切型伺服編程手冊
[2] BWS伺服BBR系列輪切型伺服操作手冊