
1 引言
在工業(yè)現(xiàn)場(chǎng),結(jié)構(gòu)光以其獨(dú)特的優(yōu)點(diǎn)被廣泛運(yùn)用于高精度測(cè)量中,。點(diǎn)結(jié)構(gòu)光多用于基于三角測(cè)量原理的測(cè)量系統(tǒng)中,,多線結(jié)構(gòu)光和網(wǎng)格結(jié)構(gòu)光則多用于三維建模和人工智能。隨著檢測(cè)及傳感器,、電子信息,、計(jì)算機(jī)、通訊等技術(shù)的發(fā)展,,鋼板測(cè)寬儀經(jīng)歷了光機(jī)掃描式,、主動(dòng)式CCD光電,、被動(dòng)式CCD光電到激光輔助CCD光電幾種測(cè)寬儀的發(fā)展。從方法上,,大致有機(jī)械接觸式測(cè)寬法,、電視測(cè)量法、線陣CCD測(cè)寬,、激光測(cè)寬等,,但存在精度不高、勞動(dòng)強(qiáng)度大,、技術(shù)實(shí)現(xiàn)復(fù)雜,,甚至有的還有一定的輻射。這里提出一種簡(jiǎn)單易行的方案來(lái)實(shí)現(xiàn)基于面陣CCD和激光輔助的測(cè)寬系統(tǒng),。
2 測(cè)量系統(tǒng)實(shí)現(xiàn)
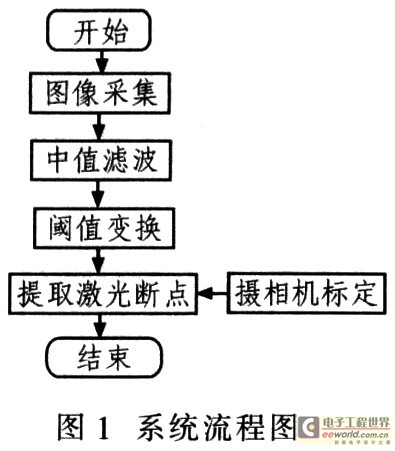
系統(tǒng)實(shí)現(xiàn)有相機(jī)標(biāo)定,、圖像采集、中值濾波,、閾值變換,、提取激光斷點(diǎn)、計(jì)算鋼板寬度等步驟,,如圖1所示,。
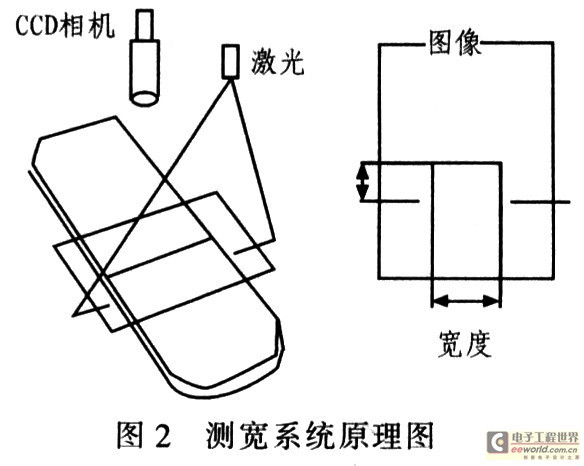
攝像機(jī)標(biāo)定和圖像處理,具體如下:首先激光器照射到鋼板上,,由千兆網(wǎng)相機(jī)拍照,,經(jīng)千兆網(wǎng)卡輸入計(jì)算機(jī),圖像處理后獲得激光斷點(diǎn)的兩個(gè)圖像坐標(biāo),。由標(biāo)定得到的數(shù)學(xué)模型獲得激光斷點(diǎn)的空間坐標(biāo),。根據(jù)勾股定理求得該兩點(diǎn)之間線段的長(zhǎng)度,現(xiàn)場(chǎng)有凹槽同定鋼板,,可不考慮鋼板傾斜,,該線段的長(zhǎng)度即為鋼板的寬度。圖2為測(cè)寬系統(tǒng)原理圖,。
2.1 攝像機(jī)標(biāo)定
攝像機(jī)標(biāo)定是指由世界坐標(biāo)系中標(biāo)定點(diǎn)以及對(duì)應(yīng)圖像像素坐標(biāo)導(dǎo)出攝像機(jī)矩陣,,并估計(jì)攝像機(jī)的內(nèi)部參數(shù)。由于無(wú)論鋼板厚度如何變化,,鋼板始終和激光面有條交線,,即鋼板寬度方向。與z軸方向無(wú)關(guān),,因此使用平面標(biāo)定,,如圖3所示。將標(biāo)定板(圖4)放在激光面上,,以垂直于標(biāo)定板的方向?yàn)閦軸,,以平行和垂直于鋼板寬度的方向在標(biāo)定板上建立平面直角坐標(biāo)系,。選取圓的中心為標(biāo)定點(diǎn),兩個(gè)相鄰圓心之間的距離是16 mm,,根據(jù)選取的坐標(biāo)系,,這些標(biāo)定點(diǎn)在激光面上的位置是已知的,通過(guò)獲取其對(duì)應(yīng)的圖像坐標(biāo)確定攝像機(jī)的12個(gè)內(nèi)外參數(shù),,從而完成標(biāo)定工作,。

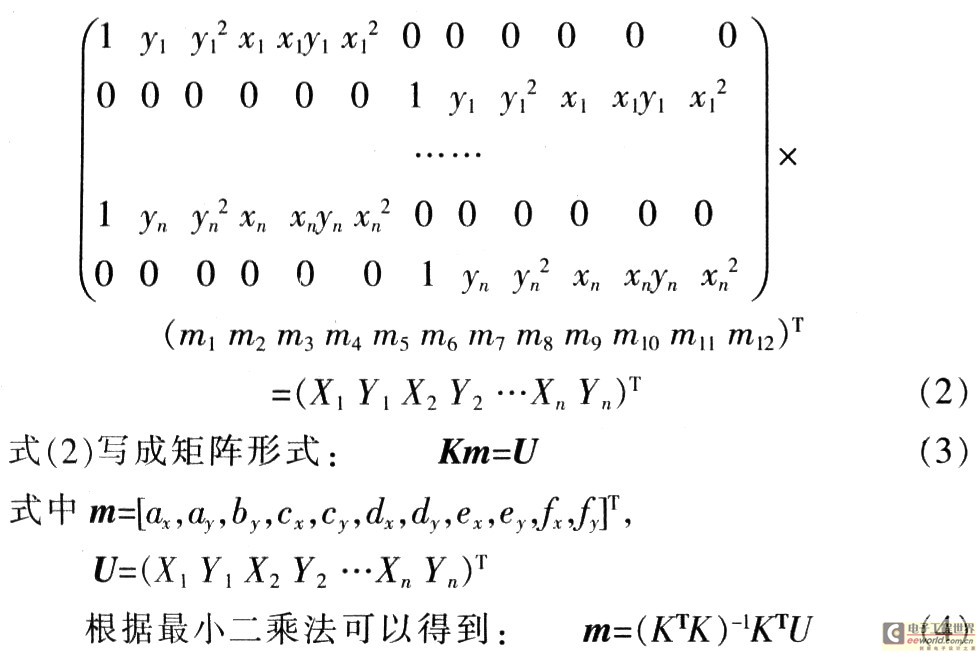
由一組已知的世界坐標(biāo)系的點(diǎn)以及對(duì)應(yīng)在圖像坐標(biāo)系的點(diǎn)可以確定兩個(gè)方程,因此,,要確定攝像機(jī)的內(nèi)外參數(shù),,需至少知道6組這樣的點(diǎn),而所采用的靶標(biāo)可以提供充足的特征點(diǎn),,利用最小二乘法確定各個(gè)攝像機(jī)的內(nèi)外參數(shù),。從透影的角度看,圖像坐標(biāo)與世界坐標(biāo)一定存在某種關(guān)系,。由應(yīng)用光學(xué)理論可知,,在完全理想的情況下,圖像坐標(biāo)(x,,y)和世界坐標(biāo)(X,,Y,Z)(假設(shè)Z=0)應(yīng)是比例關(guān)系,。然而由于存在畸變,,以及CCD攝像機(jī)安裝的誤差(與光軸不垂直),使這一比例關(guān)系發(fā)生改變,,而導(dǎo)致它們存在非線性關(guān)系。這一對(duì)應(yīng)關(guān)系根據(jù)精度要求的不同可采用不同的模型描述,,根據(jù)問(wèn)題的實(shí)際情況,,用二元二次多項(xiàng)式簡(jiǎn)化模型就可精確描述,建立的數(shù)學(xué)模型如下:

式中,,ax,ay,by,cx,cy,dx,dy,ex,ey,fx,fy是12個(gè)待確定的參數(shù),。
需要6組已知的點(diǎn)。為了精確,,這里采用更多的點(diǎn),,用最小二乘法確定這12個(gè)參數(shù)。
實(shí)驗(yàn)中選取25個(gè)點(diǎn),,應(yīng)用灰度重心法提取標(biāo)定點(diǎn)圖像坐標(biāo),,如圖4所示,對(duì)應(yīng)的世界坐標(biāo)在定義的坐標(biāo)系下是已知的,,則得到表1,。

用Matlab編程,,求得:
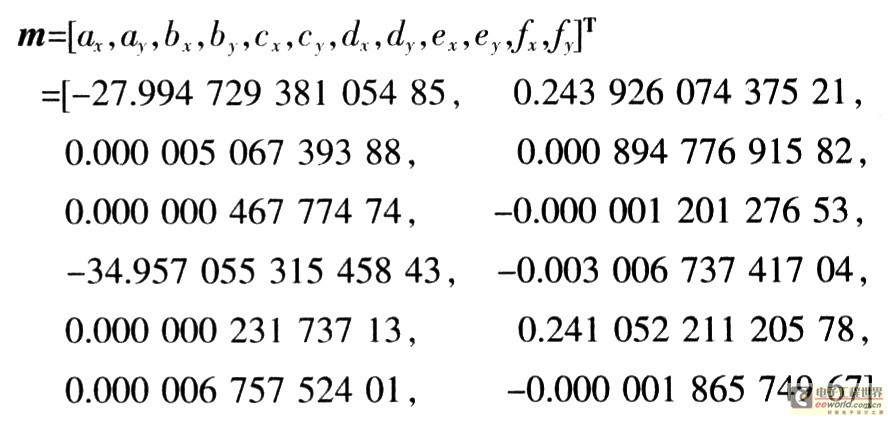
求得相機(jī)轉(zhuǎn)換矩陣.便可由罔像上任意點(diǎn)的坐標(biāo)得到實(shí)際坐標(biāo)。
2.2 圖像處理
得到相機(jī)轉(zhuǎn)換矩陣后,,最重要的是得到兩個(gè)激光斷點(diǎn)處的圖像坐標(biāo),。實(shí)驗(yàn)中發(fā)現(xiàn),采集的鋼板圖片中罔像較為黑暗區(qū)出現(xiàn)亮點(diǎn),,這些亮點(diǎn)屬于噪聲,,需要進(jìn)行中值濾波,以防止后面的點(diǎn)運(yùn)算出錯(cuò)而得到錯(cuò)誤的目標(biāo)區(qū)域,。
濾除噪聲后,,還需識(shí)別出激光線。激光線與背景區(qū)別較大,,激光線的灰度值是255,,而其他部分的灰度值遠(yuǎn)小于255。為有效識(shí)別出激光線,,使激光線上的像素與其他部分像素的灰度值有非常明顯的區(qū)別,,選擇閾值變換的處理方法,使激光線上的像素灰度值為255,,其他部分的像素灰度值為0,。便可提取鋼板激光斷點(diǎn)處的圖像坐標(biāo),其算法如圖5所示,。
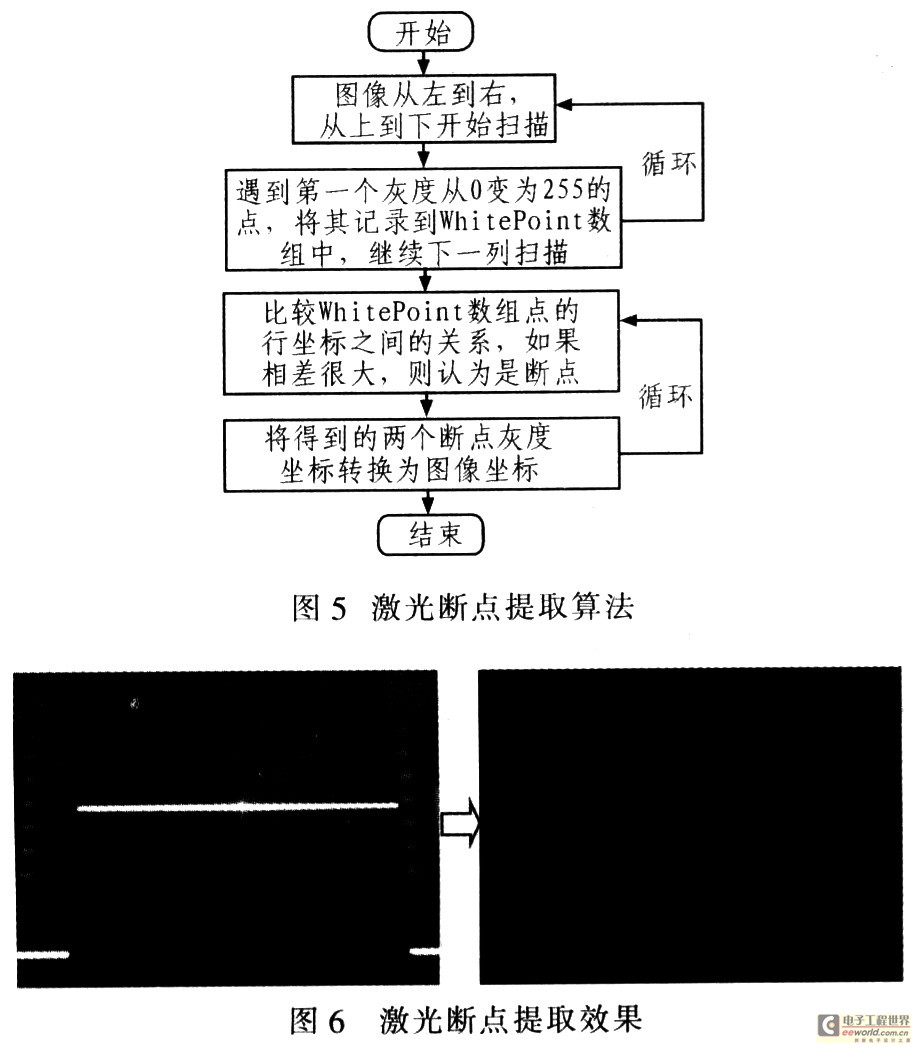
首先掃描圖像像素,,從左到右逐列掃描,提取所有激光線上的第1個(gè)白點(diǎn),,將其存到數(shù)組中,,然后前后對(duì)比數(shù)組中的數(shù)據(jù),如果發(fā)現(xiàn)行之間跳動(dòng)很大,,則認(rèn)為是斷點(diǎn),。圖6是得到的激光斷點(diǎn)效果圖。
3 鋼板寬度測(cè)量
由于系統(tǒng)在激光面上進(jìn)行標(biāo)定,,因此可不必考慮鋼板厚度變化對(duì)結(jié)果造成的影響,。又由于鋼板現(xiàn)場(chǎng)有凹槽的固定,不必考慮鋼板傾斜的影響,。為驗(yàn)證實(shí)驗(yàn)結(jié)果,,采用10種不同的鋼板,分別測(cè)量,,得到表2所示的數(shù)據(jù),。

將其更直觀地在圖7中顯示,由圖可看到,與真實(shí)值相比,,雖然有一定誤差,,但測(cè)量效果是理想的。存在誤差的原因有光學(xué)鏡頭畸變引起的測(cè)量誤差,、量具誤差,、環(huán)境誤差、方法誤差等,。

4 結(jié)束語(yǔ)
結(jié)合線性結(jié)構(gòu)光和CCD攝影測(cè)量原理提出一種新的簡(jiǎn)單易行的鋼板寬度測(cè)量系統(tǒng),。用激光器發(fā)射線性結(jié)構(gòu)光投射到鋼板寬度方向,由于鋼板具有一定的厚度,,因此在鋼板兩側(cè)形成兩個(gè)斷點(diǎn),,利用CCD攝像機(jī)獲取整塊鋼板的圖像,并經(jīng)高速圖像采集卡將圖像A/D轉(zhuǎn)換后輸入計(jì)算機(jī),,然后經(jīng)圖像處理獲取鋼板兩側(cè)激光斷點(diǎn)的圖像坐標(biāo),,通過(guò)攝像機(jī)標(biāo)定技術(shù),轉(zhuǎn)化為鋼板的實(shí)際坐標(biāo),,進(jìn)而得到鋼板的寬度,。系統(tǒng)測(cè)量準(zhǔn)確,簡(jiǎn)單易行,,成本較低,,穩(wěn)定性好,在工業(yè)現(xiàn)場(chǎng)中具有一定的實(shí)用價(jià)值,。