
引言
一般電源設(shè)備只能對(duì)電池組的整體輸出電壓和電流進(jìn)行測(cè)量,對(duì)于單塊電池不能進(jìn)行在線測(cè)量。而電池組的失效又往往是從單塊電池失效開始的一種惡性循環(huán),尤其對(duì)于使用時(shí)間較長(zhǎng)但又不超過(guò)使用期限的電池組,單純依靠維護(hù)人員的日常維護(hù)很難發(fā)現(xiàn)問(wèn)題。因此,對(duì)于單塊電池的運(yùn)行參數(shù)進(jìn)行在線監(jiān)控,及時(shí)發(fā)現(xiàn)問(wèn)題就變得極為重要。
單塊電池的損壞首先表現(xiàn)在端電壓在充電時(shí)過(guò)高而在放電時(shí)又迅速下降,電池體溫升高,負(fù)載能力下降等異常現(xiàn)象。可以通過(guò)對(duì)電池的端電壓、體溫等參數(shù)的在線測(cè)量及時(shí)發(fā)現(xiàn)故障電池。
早期的蓄電池在線監(jiān)控采用集中監(jiān)控方法,或是基于RS-232(或RS-485)總線的分散采集、集中監(jiān)控的分布式測(cè)量方法。這些方法只能采用主從式系統(tǒng)結(jié)構(gòu),以輪詢方式收集數(shù)據(jù)。這是因?yàn)镽S-232和RS-485總線只是一種純粹的物理接口,不具有主動(dòng)協(xié)調(diào)能力。CAN總線是一種多主機(jī)控制局域網(wǎng)標(biāo)準(zhǔn),具有物理層和數(shù)據(jù)鏈路層的網(wǎng)絡(luò)協(xié)議、多主節(jié)點(diǎn)、無(wú)損仲裁、高可靠性及擴(kuò)充性能好等特點(diǎn)。下面給出一種基于CAN總線的分布式蓄電池在線監(jiān)控系統(tǒng)。
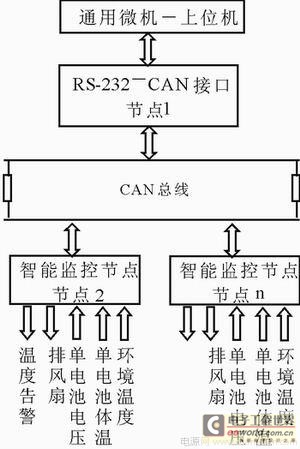
圖1 分布式蓄電池在線監(jiān)控系統(tǒng)功能示意圖
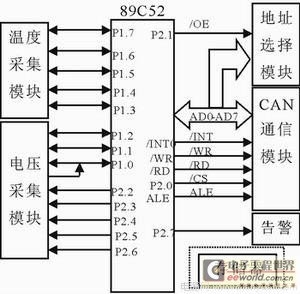
圖2智能監(jiān)控節(jié)點(diǎn)結(jié)構(gòu)圖
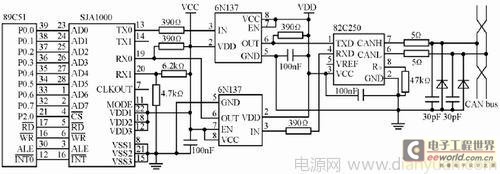
圖3 CAN接口模塊原理圖
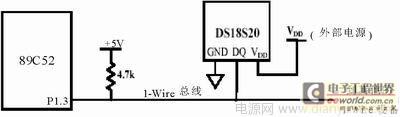
圖4 DS1820與單片機(jī)連接示意圖
系統(tǒng)組成
系統(tǒng)由上位機(jī)、RS-232-CAN接口和智能節(jié)點(diǎn)組成,如圖1所示。
上位機(jī)由普通微機(jī)組成,接收各節(jié)點(diǎn)的監(jiān)控?cái)?shù)據(jù),建立電池組運(yùn)行數(shù)據(jù)庫(kù),對(duì)采集到的電池?cái)?shù)據(jù)進(jìn)行處理(如記錄電池的履歷、采集數(shù)據(jù)的時(shí)間等)并以表格或圖形的方式輸出顯示,對(duì)整個(gè)系統(tǒng)的運(yùn)行狀況進(jìn)行管理等。
RS-232-CAN接口為CAN總線與上位機(jī)的接口,完成CAN總線數(shù)據(jù)與RS-232接口的數(shù)據(jù)轉(zhuǎn)換,對(duì)智能節(jié)點(diǎn)來(lái)的數(shù)據(jù)信息進(jìn)行緩存,對(duì)告警信號(hào)進(jìn)行告警以通知維護(hù)人員進(jìn)行處理。
智能節(jié)點(diǎn)為智能型的監(jiān)控模塊,實(shí)現(xiàn)對(duì)電池組內(nèi)(總電壓48V,單塊電壓12V或2V)的單塊電池端電壓、體溫、環(huán)境溫度進(jìn)行測(cè)量。若超出工作范圍則進(jìn)行告警,并將監(jiān)測(cè)數(shù)據(jù)存儲(chǔ),定期上報(bào)監(jiān)控?cái)?shù)據(jù)。超限告警信號(hào)及時(shí)上報(bào),并可接受上位機(jī)的輪詢。下面僅就智能節(jié)點(diǎn)給出詳細(xì)的設(shè)計(jì)方案。
硬件組成
智能監(jiān)控節(jié)點(diǎn)以89C52為控制器,外圍模塊包括CAN接口模塊、溫度測(cè)量模塊、電壓測(cè)量模塊、告警模塊、節(jié)點(diǎn)地址選擇和可選的存儲(chǔ)器模塊等,如圖2所示。為充分利用89C52的接口資源,除CAN接口模塊外其余模塊均采用串行接口器件,這樣就減小了電路體積,降低了電路的硬件成本。
CAN接口模塊
CAN總線協(xié)議及其特性見參考文獻(xiàn)。目前,具有CAN協(xié)議功能的芯片很多,本設(shè)計(jì)選用常見的PHLIPLE公司的SJA1000獨(dú)立CAN控制器芯片和82C250 CAN接口驅(qū)動(dòng)芯片。為增強(qiáng)節(jié)點(diǎn)的抗干擾能力,SJA1000的TX0和RX0通過(guò)高速光耦6N137與82C250相連,電路如圖3所示。
電壓測(cè)量模塊
當(dāng)蓄電池是由4節(jié)12V電池串接而成時(shí),其在線端電壓遠(yuǎn)高于ADC的允許輸入電壓,所以對(duì)電壓的采集電路要進(jìn)行特別設(shè)計(jì):將串連電池組的各節(jié)電池端電壓經(jīng)模擬開關(guān)分別引入分壓電路進(jìn)行分壓處理,再經(jīng)電壓跟隨器進(jìn)行阻抗變換后送入ADC的差分輸入端,轉(zhuǎn)換后的電壓數(shù)字量輸出到單片機(jī)的PI口。
ADC選用National Semiconductor的ADC0838。 該器件是一種輸入端可編程、單端8通道/差分4通道、8位串行ADC,其數(shù)據(jù)輸入輸出口可以分時(shí)共用。
模擬開關(guān)選用MAXIM的MAX4613。它是一種四路單刀單擲TTL/CMOS兼容的模擬開關(guān),可單端供電(9~40V)也可雙端供電(±4.5~±20V),與電池組的連接 采用“浮地”方式:每個(gè)MAX4613控制兩節(jié)電池的選通,電源和地分別取兩節(jié)電池串連后的正極和負(fù)極。由于MAX4613的S1、S4和S2、S3的控制極性相反,所以不能采用譯碼電路,而由單片機(jī)的四個(gè)I/O口線經(jīng)光耦隔離后單獨(dú)驅(qū)動(dòng),以保證同時(shí)只有一路電池電壓接入后級(jí)的分壓電路。另外,其控制端采用CMOS電平(VL接V+)。
分壓電路采用三個(gè)相同的電阻,分壓后的電壓約為4V左右。由于使用同一個(gè)分壓網(wǎng)絡(luò),避免了由于分壓網(wǎng)絡(luò)的差異引起各路間的誤差。同時(shí)模擬轉(zhuǎn)換器采用差分輸入從而減少了共模干擾和避免了“浮地”引起的電壓不兼容的問(wèn)題。
如果對(duì)2V電池采樣,可以用6個(gè)CD4052模擬開關(guān)控制各節(jié)電池的選通,每個(gè)CD4052控制4節(jié)電池,由兩個(gè)I/O口線經(jīng)光耦隔離后驅(qū)動(dòng)兩個(gè)地址選擇端,另三個(gè)I/O口線經(jīng)74LS138譯碼后分別控制六個(gè)CD4052的使能端(INH)。
溫度測(cè)量模塊
溫度測(cè)量模塊采用美國(guó)DALLAS公司推出的DS18S20系列單總線數(shù)字溫度計(jì),只需要一根導(dǎo)線就可將單片機(jī)和DS18S20連接起來(lái),如圖4所示。每個(gè)I/O口線可以同時(shí)掛接多個(gè)DS18S20。
軟件的實(shí)現(xiàn)
軟件設(shè)計(jì)采用模塊化編程,系統(tǒng)軟件主要分為主程序、數(shù)據(jù)采集(電壓、溫度)處理程序和通訊程序。
主程序?yàn)橄到y(tǒng)控制程序, 實(shí)現(xiàn)對(duì)系統(tǒng)進(jìn)行初始化(包括系統(tǒng)自檢、讀取本節(jié)點(diǎn)地址、電池組電池電壓種類、向上位機(jī)發(fā)送本節(jié)點(diǎn)的地址、接收上位機(jī)發(fā)送的本節(jié)點(diǎn)的基準(zhǔn)電壓值和溫度值)和各模塊軟件的總體調(diào)度。
數(shù)據(jù)采集處理程序包括電壓采集和溫度采集。由于DS18S20的溫度轉(zhuǎn)換時(shí)間較長(zhǎng)(750ms),所以每次采集先進(jìn)行溫度轉(zhuǎn)換、電壓采集,再進(jìn)行溫度的采集。溫度轉(zhuǎn)換和電壓采集同步進(jìn)行。每一輪采集后要將數(shù)據(jù)進(jìn)行處理,判斷是否超過(guò)限定值。若正常則判斷是否采集了5次,若不是則再次進(jìn)行采集。這是因?yàn)閿?shù)據(jù)的變換是緩慢的,如果正常就沒有必要每次都將數(shù)據(jù)上報(bào),以減少CAN總線上的數(shù)據(jù)量;若到了5次或數(shù)據(jù)超限,則對(duì)數(shù)據(jù)打包上傳,進(jìn)入CAN通信階段。
CAN通信程序負(fù)責(zé)將采集到的數(shù)據(jù)發(fā)送到CAN控制器,再由CAN控制器負(fù)責(zé)將數(shù)據(jù)發(fā)送到CAN總線。主要的子程序有:CAN初始化、CAN發(fā)送、CAN接收、ADC子程序,DS1820的復(fù)位、啟動(dòng)、ROM的搜索、讀寫等。其中CAN初始化、發(fā)送和接收子程序、DS1820的復(fù)位、啟動(dòng)、ROM搜索、讀寫等可參閱后面的參考文獻(xiàn),ADC的轉(zhuǎn)換子程序詳見本刊網(wǎng)站。
結(jié)語(yǔ)
分布式蓄電池智能監(jiān)測(cè)系統(tǒng)智能化程度高、測(cè)量準(zhǔn)確、能及時(shí)發(fā)現(xiàn)蓄電池組存在的早期故障。其智能監(jiān)控節(jié)點(diǎn)可以作為對(duì)一個(gè)臺(tái)站的多組電池實(shí)現(xiàn)分散采集、集中監(jiān)控的一個(gè)組成部分進(jìn)行聯(lián)網(wǎng)使用,也可以作為開關(guān)電源的一個(gè)附屬部分與開關(guān)電源配套使用。CAN接口可以用RS-232接口代替,以和現(xiàn)有的開關(guān)電源的控制主機(jī)聯(lián)接,提高現(xiàn)有電源的性能。