
摘 要:用EPLD實(shí)現(xiàn)的單脈沖二次雷達(dá)" title="二次雷達(dá)">二次雷達(dá)應(yīng)答處理器。其主要功能包括:應(yīng)答框架脈沖檢測,應(yīng)答信息解碼,將應(yīng)答信息裝配成飛機(jī)的同步應(yīng)答組形成目標(biāo)報(bào)告,丟棄非同步虛假應(yīng)答。
關(guān)鍵詞:單脈沖二次雷達(dá)? 應(yīng)答模式? EPLD
?
1 一次雷達(dá)與二次雷達(dá)
??? 二次雷達(dá)與一次雷達(dá)基本上是并行發(fā)展的。與一次雷達(dá)相比,二次雷達(dá)有回波強(qiáng)、無目標(biāo)閃爍效應(yīng)、詢問波長與應(yīng)答波長不等的特點(diǎn),從而消除了地物雜波和氣象雜波的干擾。單脈沖技術(shù)應(yīng)用于二次雷達(dá),可以方便地基于多個(gè)波束對目標(biāo)測量,進(jìn)而有效地增加數(shù)據(jù)冗余度,提高角度測量的精度。對應(yīng)答處理而言,單脈沖技術(shù)的應(yīng)用,大大提高了在混疊或交織情況下對應(yīng)答碼的解碼能力,使單脈沖二次雷達(dá)與常規(guī)二次雷達(dá)相比實(shí)現(xiàn)了一次質(zhì)的飛躍。
??? 二次雷達(dá)與一次雷達(dá)的根本區(qū)別是工作方式不同。一次雷達(dá)依靠目標(biāo)對雷達(dá)發(fā)射的電磁波的反射機(jī)理工作,它可以主動(dòng)發(fā)現(xiàn)目標(biāo)并對目標(biāo)定位;二次雷達(dá)則是在地面站和目標(biāo)應(yīng)答機(jī)" title="應(yīng)答機(jī)">應(yīng)答機(jī)的合作下,采用問答模式工作。目前的航管二次雷達(dá)共有七種詢問模式,分別稱為1、2、3/A、B、C、D和S模式。根據(jù)詢問脈沖P1與P3的間距決定(S模式除外)各種詢問模式。
??? 機(jī)載應(yīng)答機(jī)發(fā)出的應(yīng)答碼由16個(gè)信息碼位組成,這些碼位的代號依次是 F1、C1、A1、C2、A2、C4、A4、X、B1、D1、B2、D2、B4、D4、F2 和SPI。每個(gè)碼位都有兩種狀態(tài),即有脈沖或無脈沖。有脈沖時(shí)為“1”,無脈沖時(shí)為“0”。F1與F2的0.5電平處的脈沖前沿間隔為20.3±0.1μs,稱為框架脈沖,它們是二次雷達(dá)應(yīng)答信號的標(biāo)志脈沖,均恒為“1”狀態(tài)。X位是備用狀態(tài),恒為“0”。兩個(gè)框架脈沖(F1與F2)之間的12個(gè)信息碼位,可以編成4 096個(gè)獨(dú)立的應(yīng)答碼。SPI是特殊定位識別碼,當(dāng)兩架飛機(jī)相互接近或者應(yīng)答碼相同時(shí),調(diào)度員可以要求其中的一架飛機(jī)在已回答的12個(gè)碼位基礎(chǔ)上再增加一個(gè)SPI脈沖,以便準(zhǔn)確識別。二次雷達(dá)應(yīng)答信號組成如圖1所示。
?

2 應(yīng)答處理器系統(tǒng)組成
??? 單脈沖二次雷達(dá)應(yīng)答信號處理的基本流程如圖2所示。
?

??? 在視頻預(yù)處理器中,和與差支路的∑、△視頻信號,經(jīng)A/D轉(zhuǎn)換器進(jìn)行數(shù)字化處理后,變成兩組8位的數(shù)字信號傳送給應(yīng)答處理機(jī);將∑接收單元與△接收單元的信號經(jīng)相位鑒別器,生成表示目標(biāo)在波束中心左側(cè)或右側(cè)的軸向指示信號BI(2位),送應(yīng)答處理器;∑與Ω兩視頻幅度進(jìn)行比較,產(chǎn)生表示應(yīng)答為旁瓣應(yīng)答還是主瓣應(yīng)答的RSLS(1位);接收信號經(jīng)6dB檢測、反窄處理、二分層產(chǎn)生PSV(處理后的和視頻,1位)。視頻預(yù)處理器產(chǎn)生上述信號并輸入給應(yīng)答處理機(jī),進(jìn)行框架檢測、和差比計(jì)算、碼裝配等處理,最終形成應(yīng)答報(bào)告輸出給點(diǎn)/航跡處理計(jì)算機(jī)。應(yīng)答處理機(jī)系統(tǒng)的組成如圖3。
?

??? 在應(yīng)答處理機(jī)中選用了Lattice公司的EPLD作為主處理芯片(ispLSI1032E)。該芯片有64個(gè)I/O端,8個(gè)指定輸入端,6 000個(gè)邏輯門,192個(gè)寄存器,最大時(shí)延≤12ns,通過簡單的5線接口,即可用PC機(jī)對線路板上菊花鏈結(jié)構(gòu)的最多8個(gè)芯片進(jìn)行編程。PC104是嵌入式計(jì)算機(jī),其CPU是一片兼容的64位第六代處理器,運(yùn)行速度可達(dá)300MHz,其圖形處理器可支持各種LCD及TFT顯示屏,同時(shí)支持PS/2鍵盤、PS/2鼠標(biāo)、兩串行接口、一并行接口、USB接口、聲卡功能。
??? 應(yīng)答處理機(jī)的工作原理:1位PSV、8位和視頻、8位差視頻、2位軸向指示及1位接收旁瓣抑制信號,在經(jīng)過輸入緩沖并與系統(tǒng)時(shí)鐘信號同步后,其中的PSV信號進(jìn)入邊沿產(chǎn)生電路,所產(chǎn)生的前沿延遲一個(gè)框架時(shí)間(20.3μs)后與未延遲的前沿信號相與給出目標(biāo)框架,啟動(dòng)4個(gè)解碼器中處于空閑狀態(tài)的裝配器開始解碼工作,產(chǎn)生解碼需要的定時(shí)脈沖序列。同時(shí)和視頻、差視頻、軸向指示、旁瓣抑制信號送入視頻采樣電路,經(jīng)過視頻采樣產(chǎn)生的SVA(和視頻幅度)和DVA(差視頻幅度)經(jīng)和差比計(jì)算電路產(chǎn)生SDR值,SVA、DVA、SDR送數(shù)字寄存器進(jìn)行延遲,延遲及未延遲的SVA、SDR、軸向指示、接收旁瓣抑制和目標(biāo)前沿信號一起送入代碼裝配器,在定時(shí)脈沖的作用下,對目標(biāo)應(yīng)答信息進(jìn)行解碼、去除幻影應(yīng)答、解旁瓣應(yīng)答和軍事告急應(yīng)答。經(jīng)過進(jìn)一步相關(guān)、確認(rèn)和修正后,將目標(biāo)的SVA和SDR代碼、綜合的代碼置信度信息及一些標(biāo)志信息送代碼裝配總線,在輸出控制的情況下依次寫入先進(jìn)先出(FIFO),PC機(jī)依次讀出GPS時(shí)間信息及FIFO中的目標(biāo)報(bào)告。
3 系統(tǒng)的具體實(shí)現(xiàn)
3.1 旁瓣抑制與邊沿提取
??? 近距離的飛機(jī)能夠被天線的旁瓣探測到,但如果沒有特殊的旁瓣抑制措施,就會使地面接收裝置接收到來自旁瓣的應(yīng)答信息,從而夸大飛機(jī)的數(shù)量。P2作為旁瓣抑制脈沖由Ω通道發(fā)射,在天線的主瓣波束內(nèi),P1與P3的幅度會高于P2,而在天線的旁瓣內(nèi),P2會高于P1與P3,機(jī)載應(yīng)答機(jī)根據(jù)P1、P3與P2的幅度關(guān)系決定是否做出應(yīng)答,對旁瓣內(nèi)的詢問不予應(yīng)答。
??? 單脈沖二次雷達(dá)的PSV信號是由接收機(jī)和通道(∑)內(nèi)的應(yīng)答信號,經(jīng)過特定門限電平進(jìn)行二值化處理后輸出的0或1電平。前后沿的提取,可以將PSV信號輸入兩個(gè)寄存器,通過與門電路實(shí)現(xiàn)。實(shí)現(xiàn)電路如圖4所示。
?
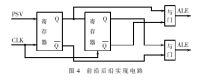
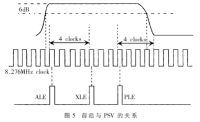
??? ALE與ATE分別是與時(shí)鐘脈寬(0.1208μs)相同的前沿與后沿。當(dāng)PSV信號的寬度大于一個(gè)應(yīng)答碼的寬度時(shí),就認(rèn)為接收到的是兩個(gè)或多個(gè)脈沖的混疊,于是產(chǎn)生了一個(gè)偽前沿(PLE)。PLE的產(chǎn)生時(shí)間是從ATE開始向前數(shù)四個(gè)時(shí)鐘周期" title="時(shí)鐘周期">時(shí)鐘周期(因?yàn)橐粋€(gè)標(biāo)準(zhǔn)的脈沖寬度為四個(gè)時(shí)鐘周期),如果PSV的脈寬更長,可認(rèn)為有更多個(gè)應(yīng)答脈沖的交疊,一個(gè)額外前沿(XLE)在ALE與PLE之間產(chǎn)生,在以后的處理中只用于幫助判斷結(jié)果的正確性。前沿與PSV的關(guān)系如圖5所示。
?
3.2 視頻采樣
??? 視頻采樣分為ALE采樣與PLE采樣。
??? ALE采樣使用了4×4寄存器陣列,這樣就能夠存儲多于一個(gè)的采樣值。為確保寄存器陣列的建立與保持時(shí)間,ALE脈沖經(jīng)一級觸發(fā)后,由延遲器產(chǎn)生一個(gè)40μs的延遲,并限制寫脈沖到30μs。寄存器陣列的寫地址由4位計(jì)數(shù)器產(chǎn)生,每個(gè)采樣脈沖計(jì)數(shù)器加1。PLE采樣與ALE采樣電路不同之處是它只需要存儲一個(gè)PLE采樣值。本系統(tǒng)的采樣時(shí)鐘為8.276MHz。
3.3 SDR計(jì)算
??? 由于SDR模塊中采用了對數(shù)運(yùn)算,所以在進(jìn)行和幅度與差幅度比值的運(yùn)算時(shí),只需要將差信號反相后接在加法器的輸入端。除在波束中心外的和信號小于差信號外,△-∑在波束中心出現(xiàn)負(fù)峰值,所以在負(fù)峰值最大處為波束的中心。根據(jù)其他△-∑的值并參照負(fù)峰值,可轉(zhuǎn)化為偏離波束中心的角度。
3.4 框架檢測與應(yīng)答解碼
??? 正常情況下,兩個(gè)框架脈沖的間隔為20.3±0.1μs,因此,一個(gè)框架就認(rèn)為兩個(gè)前沿間有167、168或169個(gè)時(shí)鐘周期。本系統(tǒng)框架脈沖的檢測是根據(jù)比較延時(shí)的前沿與非延時(shí)情況下的重合情況,如圖6所示。延時(shí)的前沿對應(yīng)于框架脈沖F1,非延時(shí)的前沿對應(yīng)脈沖F2,F(xiàn)1相對于F2延時(shí)20.3μs。由于F2相對于F1有3個(gè)時(shí)鐘脈沖的變化范圍,所以F2與F1的前沿延時(shí)167、168或169個(gè)時(shí)鐘周期的任一個(gè)對齊,都認(rèn)為是一個(gè)正確的框架。
?

???
??? 以下三種情況下框架檢測將被禁止:
??? (1)F1、F2都是來自旁瓣的應(yīng)答信號;
??? (2)兩個(gè)相鄰的框架之間的間隔小于3個(gè)時(shí)鐘周期;
??? (3)S模式的頭應(yīng)答被檢測到,框架檢測間被禁止120μs,因?yàn)橐粋€(gè)S模式應(yīng)答持續(xù)120μs。
??? 應(yīng)答信息相互交織產(chǎn)生幻影框架,如圖7所示。假如只用框架脈沖間的時(shí)間間隔" title="時(shí)間間隔">時(shí)間間隔為20.3μs的原則檢測,可檢測到4個(gè)框架脈沖對,框架檢測器不能區(qū)分“虛假”框架和來自飛機(jī)的真實(shí)框架脈沖對。
?

??? 補(bǔ)救措施是同時(shí)只處理兩個(gè)應(yīng)答。當(dāng)第一個(gè)" title="第一個(gè)">第一個(gè)應(yīng)答被檢測到,隨后21μs中檢測到的應(yīng)答為臨時(shí)應(yīng)答,如果另外又發(fā)現(xiàn)一個(gè)重疊應(yīng)答,這個(gè)臨時(shí)應(yīng)答就被取消此過程重復(fù)進(jìn)行,直到檢測到最后一個(gè)應(yīng)答,此應(yīng)答被保留。因?yàn)榈谝粋€(gè)檢測到的框架肯定是真實(shí)應(yīng)答,沒有更早的脈沖產(chǎn)生錯(cuò)誤框架。同樣,最后一個(gè)框架肯定是真實(shí)應(yīng)答,沒有更晚的脈沖能產(chǎn)生錯(cuò)誤框架,中間檢測到的框架是可疑的,假定它們不正確。
??? 當(dāng)一個(gè)正確的框架被檢測到,接下來的任務(wù)就是檢測此次應(yīng)答碼的內(nèi)容。首先,解碼過程依據(jù)每個(gè)應(yīng)答碼間的時(shí)間間隔都是1.45μs,SPI與F2間的時(shí)間間隔是4.35μs,因此在離框架脈沖各個(gè)應(yīng)答碼可能出現(xiàn)的位置上檢測是否有應(yīng)答脈沖出現(xiàn)。考慮到每個(gè)應(yīng)答碼與框架脈沖間的時(shí)間間距有一定的允許誤差,在距框架脈沖相應(yīng)的應(yīng)答碼出現(xiàn)的位置上,提前或延后一個(gè)時(shí)鐘周期都認(rèn)為是正確應(yīng)答碼的位置。將相對于框架脈沖可能出現(xiàn)應(yīng)答碼的位置上的值與框架脈沖(非旁瓣脈沖)比較,得出應(yīng)答碼為1或0,有以下幾種情況:
?? (1)高置信度0:在應(yīng)答碼出現(xiàn)的地方?jīng)]有檢測到應(yīng)答脈沖的存在,若僅以幅度測量,則僅出現(xiàn)低幅度值。
???(2)高置信度1:在應(yīng)答碼出現(xiàn)的地方出現(xiàn)主波束內(nèi)的應(yīng)答碼,幅度與其對應(yīng)的參考脈沖相關(guān),與其他應(yīng)答的參考脈沖不相關(guān)。
?? (3)低置信度0:若此應(yīng)答脈沖被標(biāo)記為旁瓣應(yīng)答脈沖或此應(yīng)答脈沖與相應(yīng)的參考脈沖不相關(guān),則與其他應(yīng)答的參考脈沖相關(guān)。
?? (4)低置信度1:主波束應(yīng)答碼存在,但與參考脈沖不相關(guān)或與另外應(yīng)答的參考脈沖相關(guān),或既與相應(yīng)的應(yīng)答框架相關(guān)又與另外的框架相關(guān)。
3.5 碼裝配
??? 碼裝配包括SVA代碼裝配器和SDR代碼裝配器兩部分。SVA代碼裝配器的功能根據(jù)SVA平均值進(jìn)行置信度確定,產(chǎn)生對應(yīng)的置信度碼位;SDR代碼裝配器的功能是檢測到一個(gè)框架對 F1、F2時(shí),便檢查該應(yīng)答脈沖的內(nèi)容。對每個(gè)代碼位,根據(jù)SDR 平均值進(jìn)行置信度確定,產(chǎn)生對應(yīng)的置信度碼位,然后將該代碼和置信度位與來自SVA裝配器的相應(yīng)位進(jìn)行組合。
??? 因?yàn)樽疃嗄芡瑫r(shí)處理四個(gè)應(yīng)答,故有四組相同的SVA代碼裝配器和SDR代碼裝配器。其主要工作原理是:為了求得SVA的平均值,需要在一個(gè)應(yīng)答的起始時(shí)刻建立一個(gè)SVA的參考值。一般情況下,以F1為參考值,若F1為旁瓣應(yīng)答或反射應(yīng)答,則用F2為參考值。當(dāng)應(yīng)答碼與參考值相比,得到一個(gè)高置信度碼時(shí),產(chǎn)生的SVA值才被認(rèn)為是一個(gè)應(yīng)答碼。SDR的工作過程與SVA類似。把SVA代碼/置信度與相應(yīng)的SDR代碼/置信度進(jìn)行組合,串行輸出的代碼和置信度碼經(jīng)過串-并轉(zhuǎn)換輸出到FIFO,計(jì)算機(jī)(PC104)讀取FIFO的內(nèi)容,送給點(diǎn)/航跡計(jì)算機(jī)處理,顯示飛機(jī)的相關(guān)信息。
??? 二次雷達(dá)在民航系統(tǒng)和軍用敵我識別系統(tǒng)中起著非常重要的作用。隨著飛機(jī)密度的增加,對二次雷達(dá)的性能提出了更高的要求。利用上述應(yīng)答處理器,使單脈沖二次雷達(dá)達(dá)到≥400批/天線轉(zhuǎn)的處理能力,同時(shí)提高了處理精度,減小了系統(tǒng)的體積,增加了靈活性。
參考文獻(xiàn)
[1] STEVENS M C.Secondary surveillance radar:Artech House.Boston and London,1988.
[2] 山秀明.航管二次雷達(dá).北京:國防工業(yè)出版社,1983.