
摘要:為了準(zhǔn)確判定目標(biāo)偏離天線軸的方向和消除旁瓣應(yīng)答信息干擾,二次雷達(dá)接收系統(tǒng)采用了三路對數(shù)接收機(jī)單脈沖比幅體制,將帶有目標(biāo)信息的射頻信號變換成對數(shù)視頻送至應(yīng)答處理,通過對和、差通道脈沖信號鑒相器處理,判定目標(biāo)偏離天線軸的方向;運用對和、控制通道脈沖幅度比較的方法,產(chǎn)生接收旁瓣抑制信號以消除應(yīng)答干擾。從實驗和產(chǎn)品交竹后的使用情況來看,接收機(jī)設(shè)計合理,幅相處理效果滿足雷達(dá)整機(jī)的要求。
關(guān)鍵詞:二次雷達(dá);對數(shù)接收機(jī);鑒相器;脈沖比幅
0 引言
二次雷達(dá)也稱為航空交通管制雷達(dá)信標(biāo)系統(tǒng),通過地面站和目標(biāo)應(yīng)答器之間的詢問和應(yīng)答,實現(xiàn)對目標(biāo)的跟蹤,接收到的回波中包含了目標(biāo)的距離和方位信息、氣壓高度信息,還可以用于對軍用和民用目標(biāo)的識別。二次雷達(dá)采用問答方式工作,詢問與應(yīng)答射頻信號波長不同,消除了地物雜波、氣象雜波的干擾,因此應(yīng)答回波比一次雷達(dá)反射回波強(qiáng)得多。
二次雷達(dá)的接收系統(tǒng)采用對數(shù)比幅單脈沖體制。其中關(guān)鍵在于高精度、大動態(tài)的對數(shù)放大器,由于對數(shù)放大器為一種非線性放大器,其輸出幅度與輸入幅度的對數(shù)成正比。這樣,當(dāng)輸入信號在較大的范圍內(nèi)變化時,輸出信號只在較小的范圍內(nèi)變化,大大壓縮了接收機(jī)輸出信號的動態(tài)范圍,因而具有較好的抗飽和特性;它可以使雷達(dá)的接收機(jī)在強(qiáng)信號作用下不飽和,同時也減少了小目標(biāo)的丟失,能同時監(jiān)視多個強(qiáng)弱懸殊很大的目標(biāo)回波。
1 接收系統(tǒng)設(shè)計
雷達(dá)的接收系統(tǒng)由三路對數(shù)接收機(jī)組成,采用單脈沖比幅體制。原理框圖如圖1所示。
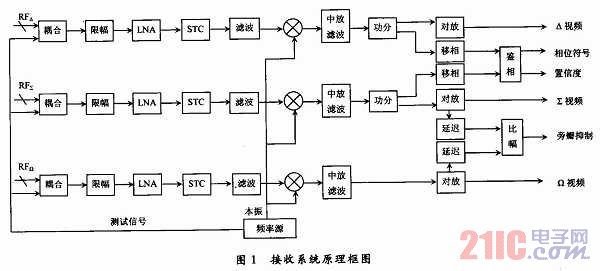
接收系統(tǒng)將天線送來的∑,△,Ω三路射頻信號,分別在幅相特性一致三個通道中進(jìn)行限幅、低噪聲放大、時間靈敏度控制,濾除鏡像頻率及帶外各種雜散頻率的干擾信號,然后與本振混頻,下變頻為60 MHz中頻信號,中頻信號由前置中放放大、濾波,再經(jīng)對數(shù)放大成視頻信號,其中,∑,△視頻信號log∑和log△傳送給視頻處理機(jī)進(jìn)行A/D變換;∑,△對放輸出的中頻信號經(jīng)鑒相,送出相位符號碼和置信度碼以判定目標(biāo)偏離天線軸的方向;∑,Ω中頻信號經(jīng)脈沖比幅后,輸出接收旁瓣抑制脈沖信號。
接收機(jī)采用一次下變頻方式,前置限幅器防止接收機(jī)被大功率信號燒毀;通過RFSTC來控制接收通道的增益,擴(kuò)展接收機(jī)的動態(tài)范圍,可以根據(jù)二次雷達(dá)工作時周圍的電磁環(huán)境來裝訂STC曲線,對落入接收機(jī)帶內(nèi)的強(qiáng)干擾信號進(jìn)行衰減;射頻濾波器抑制鏡像頻率,防止鏡像雜散通過寄生通道落入中頻帶內(nèi),并且可以抑制帶外的干擾信號;整個接收機(jī)的頻帶寬度決定于60 MHz中頻帶通濾波器的帶寬。
2 切線靈敏度
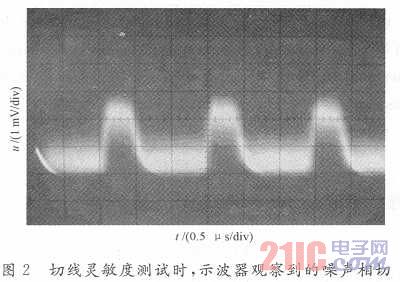
切線靈敏度和通常所說的接收機(jī)靈敏度的概念既有相同又有區(qū)別,它們都是表征雷達(dá)正常工作時接收最小信號的能力,不同在于,切線靈敏度專指脈沖調(diào)制信號,是在接收機(jī)對數(shù)放大器輸出的視頻信號中,當(dāng)無信號時的噪聲頂部和有信號時的噪聲底部處于同一電平時(即噪聲相切)的信號功率。如圖2所示是進(jìn)行切線靈敏度測試時,示波器觀察到噪聲相切的狀態(tài)。測試切線靈敏度指標(biāo)時,關(guān)鍵在于判斷脈沖信號噪聲頂部與底部是否正好相切,這與觀察判斷等主觀因素有關(guān),也與接收機(jī)帶寬和測試周圍環(huán)境明亮有關(guān)。
切線靈敏度:Si(dBm)=-114(dBm)+F(dB)+So/No(dB)+△f/1 MHz(dB),其中,F(xiàn)為噪聲系數(shù);△f為中頻帶寬;So/No為接收機(jī)輸出端的信號噪聲功率。
對于單脈沖二次雷達(dá)接收機(jī),要求噪聲系數(shù)小于7 dB或So/No=2時靈敏度為-93 dBm,帶寬為10 MHz,根據(jù)上述公式可知Si(dBm)=-94 dBm,符合靈敏度指標(biāo)的要求。
3 對數(shù)放大器
接收系統(tǒng)采用三通道對數(shù)接收機(jī),對數(shù)放大器是一種非線性放大器,具有很大的動態(tài)范圍,因此具有優(yōu)良的抗過載特性,能在強(qiáng)信號或者強(qiáng)干擾作用下不飽和,從而實現(xiàn)正常接收。
對數(shù)放大器的技術(shù)指標(biāo)(50 Ω阻抗匹配)如下:工作頻率為60 MHz;動態(tài)范圍為60 dB;對數(shù)斜率為40 mV/dB;對數(shù)精度達(dá)±30 mV;輸入信號功率為-60 dBm時,對數(shù)起點為100 mV±10 mV;輸入信號功率為0 dBm時,對數(shù)終點為2 500 mV±100 mV;輸入信號為噪聲時,對數(shù)零點小于100 mV。
由于應(yīng)答回波信號是一串連續(xù)的窄脈沖(脈寬為0.45μs),二次雷達(dá)的終端在進(jìn)行信息處理的時候,要求輸入信號具有足夠陡峭的前沿。因此,經(jīng)對數(shù)放大后,輸出波形對應(yīng)于輸入波形不能惡化,脈沖的前后沿不會變差。特別是在對放的輸入為大信號的時候,脈沖前后沿控制在120 ns以內(nèi)才能保持應(yīng)答處理采樣穩(wěn)定。
4 鑒相處理
4.1 相位差的鑒別
單脈沖二次雷達(dá)接收到的和差回波信號的相位差反映了目標(biāo)偏離天線軸的方向。對和、差接收通道的60 MHz中頻信號進(jìn)行鑒相處理,鑒相器根據(jù)鑒相結(jié)果產(chǎn)生相位符號碼和置信度碼。
用相位符號碼來確定應(yīng)答信號是在天線軸的哪個方向:處在天線軸向右方的∑,△信號是同相的,處在天線軸向左方的∑,△信號相位差180°,在天線軸向的∑,△信號相位差90°;用置信度碼來表示鑒相的結(jié)果是否可信,如圖3所示。
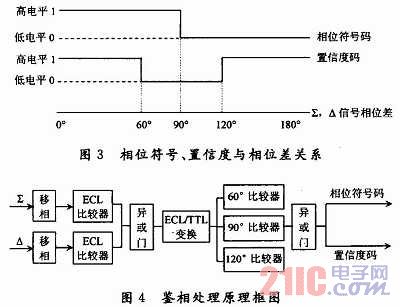
鑒相處理原理框圖如圖4所示。
4.2 相位鑒別的關(guān)鍵問題
4.2.1 相位補(bǔ)償與校準(zhǔn)
在對和差信號鑒相前,通過中頻移相器來進(jìn)行相位的校準(zhǔn),消除∑,△通道本身的相位差,保證鑒相結(jié)果真實可靠。選擇中頻移相器時,要考慮到其移相范圍是否能滿足通道相位差的校準(zhǔn)。
4.2.2 噪聲門限的設(shè)定
由于接收前端有低噪聲放大器、補(bǔ)償放大器和中放,整個接收通道的增益會給系統(tǒng)帶來本底噪聲,把本底噪聲的幅度設(shè)定為一個門限,小于這個幅度的信號都作為噪聲來進(jìn)行處理。
4.2.3 動態(tài)范圍
鑒相器在整個接收機(jī)的動態(tài)范圍內(nèi)工作正常,特別要考慮到如果和差信號強(qiáng)弱懸殊很大時,根據(jù)設(shè)定的系統(tǒng)底噪聲,當(dāng)其中一路信號的幅度低于噪聲門限時,當(dāng)作噪聲來處理,鑒相結(jié)果:置信度為0(即鑒相結(jié)果不可信),相位符號在0和1之間翻轉(zhuǎn)。
4.2.4 脈沖前后沿的對齊
根據(jù)圖3所示,對∑,△通道信號進(jìn)行脈沖鑒相,不同的相位差對應(yīng)各自的相位符號狀態(tài)。相位符號在0或1不同狀態(tài)時要保持前沿對齊,誤差控制在30 ns以內(nèi),否則應(yīng)答處理無法正常采樣。
4.2.5 脈沖寬度的保持
接收的應(yīng)答信號脈寬為0.45μs,其中,上升沿和下降沿各0.1μs,經(jīng)過鑒相后,相位符號和置信度的脈沖平頂需保持在0.25μs以上,使應(yīng)答處理采樣穩(wěn)定。
4.3 鑒相處理的實驗結(jié)果
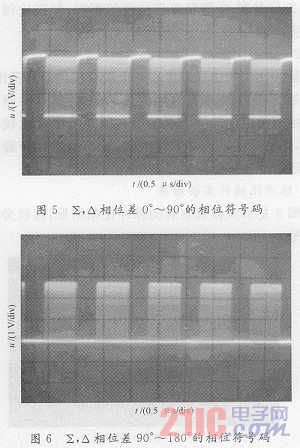
圖5,圖6是示波器觀察到的鑒相結(jié)果,即對應(yīng)不同相位差時輸出的相位符號碼。
5 接收旁瓣抑制
5.1 旁瓣抑制的原理
當(dāng)二次雷達(dá)工作的時候,近距離的飛機(jī)能夠被天線的旁瓣探測到,如果沒有特殊的旁瓣抑制措施,會使地面接收裝置接收到來自旁瓣的應(yīng)答信息,從而夸大飛機(jī)的數(shù)量。因此,在接收時,將旁瓣抑制通道(Ω通道)收到的回波也利用起來,將Ω通道與∑通道回波比幅:當(dāng)∑大于Ω信號幅度,認(rèn)為是主瓣接收的信號;而當(dāng)Ω大于∑信號幅度,則認(rèn)為是旁瓣接收的信號,此時送出接收旁瓣抑制信號,對旁瓣進(jìn)行抑制。
5.2 脈沖比幅的方法
脈沖比幅原理框圖如圖7所示。
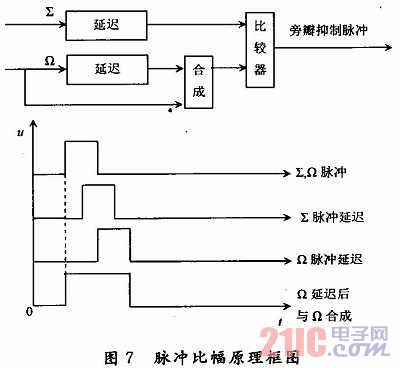
從圖7中的∑-Ω時域上可以看到:對∑脈沖延遲0.5個脈寬,對Ω脈沖延遲1個脈寬,將延遲后的Ω脈沖與原Ω脈沖合成,經(jīng)過合成后,Ω脈沖擴(kuò)展至2個脈寬,在進(jìn)行脈沖幅度比較的時候,∑脈沖的前沿和后沿均被脈寬經(jīng)過擴(kuò)展的Ω脈沖完全覆蓋,采用這樣的處理方法,很好的解決了脈沖比幅時前沿難以對齊的問題。
5.3 脈沖比幅的關(guān)鍵問題
5.3.1 幅度一致性
接收機(jī)三個通道的幅相特性保持一致,振幅差控制在1 dB以內(nèi),在脈沖比幅前,消除不同接收通道增益差異對Σ信號和Ω信號自身幅度的影響,保證比幅的結(jié)果真實可靠。
5.3.2 動態(tài)范圍
脈沖比幅的信號幅度在整個接收機(jī)的動態(tài)范圍內(nèi),特別是∑信號和Ω信號強(qiáng)弱懸殊很大,其中一路信號幅度接近噪聲電平或者是信號與噪聲的幅度比較的情況下,比幅的結(jié)果也要保持正確,輸出的接收旁瓣抑制為穩(wěn)定的0或1脈沖信號。
5.4 脈沖比幅的實驗結(jié)果
圖8是示波器觀察到的脈沖比幅結(jié)果:接收旁瓣抑制信號。
6 結(jié)語
接收系統(tǒng)采用三路對數(shù)接收機(jī)單脈沖比幅體制,設(shè)計簡單合理,可靠性高,完全滿足某型號二次雷達(dá)研制的技術(shù)指標(biāo)要求,經(jīng)過外場試驗和產(chǎn)品交付用戶使用的情況來看,接收機(jī)對應(yīng)答脈沖信號的幅相處理達(dá)到了預(yù)期的效果,對于其他二次雷達(dá)接收機(jī)的研制,具有很好的參考和借鑒作用。