
ESP是汽車主動安全領域技術的制高點,該項技術被國外大公司所壟斷,國內(nèi)尚處于研發(fā)階段。在ESP研發(fā)過程中,需要大量實車試驗。該試驗有兩大困難:一是試驗具有相當?shù)奈kU性,二是試驗對場地要求很苛刻。所以,開發(fā)硬件在環(huán)仿真平臺就成為一種迫切需求。 該仿真平臺對加速ESP控制器的算法開發(fā)有重大作用。本文采用了NI公司的PXI作為下位機來搭建系統(tǒng)。
項目背景
本方案通過深入調研,主要考慮性能、價格、易實現(xiàn)性等方面之后,最終選擇了NI的PXI和cRIO方案來進行系統(tǒng)搭建。主要調研了XPC方式、PXI系統(tǒng)、dSpace系統(tǒng)。XPC方式費用較低,但是使用不夠方便,dSpace系統(tǒng)價格遠遠高于PXI系統(tǒng),然而兩者性能差別不是很大。
系統(tǒng)構架
ESP硬件在環(huán)仿真平臺從硬件上看由上位機、下位機、控制器、執(zhí)行器、傳感器等五部分組成。
上位機用于監(jiān)控仿真過程,分析和保存仿真結果。下位機運行車輛模型,目前采用的是15自由度整車模型,能很好地模擬整車在制動、驅動、高速轉向以及聯(lián)合工況下的響應。控制器運行控制算法,對車輛運動進行相關控制。執(zhí)行器為液壓控制單元、制動管路以及制動器。傳感器為壓力傳感器,獲取各個輪缸以及主缸的壓力值,并將壓力信號傳給控制器和下位機,從而形成一個閉環(huán)系統(tǒng)。仿真平臺結構如圖1所示。

圖1 仿真平臺結構圖
仿真平臺結構圖
圖1中,上位機、下位機和控制器三者通過網(wǎng)線連接,上位機對仿真過程的監(jiān)控通過共享變量來實現(xiàn)。
系統(tǒng)硬件設計
用PXI運行整車模型,模擬車輛的運動響應,提供給控制器相關的信號。實車試驗時,控制器所獲取的信號有制動信號、主缸壓力信號、四個輪速信號、方向盤轉角信號以及橫向加速度信號和橫擺角速度信號。另外,控制器還需要通過CAN和發(fā)動機控制系統(tǒng)進行通信,從而控制發(fā)動機的輸出扭矩。PXI要能完成上述功能,并且需要采集壓力傳感器信號,從而計算車輛運動狀態(tài)。
PXI通過M系列數(shù)據(jù)采集卡PXI-6229的模擬量輸入功能來采集主缸和各個輪缸的壓力信號,用PXI-6229的數(shù)字量輸入功能采集制動信號。采用PXI-6722的模擬量輸出功能輸出電壓來表示方向盤轉角、橫向加速度、橫擺角速度。同時PXI-6722輸出4個模擬電壓,通過壓頻轉換模塊將電壓轉換成對應的頻率信號來模擬四個輪速信號。另外,實車上的CAN通信通過PXI-8461和NI9853來實現(xiàn)。
控制器方面,用cRIO做快速原型時,通過NI-9205來采集模擬電壓,得到各個傳感器的值。通過NI-9403的輸入功能來獲取制動信號和輪速信號,通過NI-9403的數(shù)字量輸出功能來控制電機和電磁閥的動作。
在執(zhí)行器方面,液壓控制單元采用Bosch(博世)的ESP 8.0的液壓控制單元。制動系統(tǒng)采用金杯客車的制動管路和制動器。仿真平臺搭建在金杯客車上,我們對金杯客車的制動管路進行了改造,安裝了壓力傳感器和HCU(整車控制器)。
系統(tǒng)軟件設計
軟件上,通過共享變量來控制仿真試驗的開始和結束,用全局變量記錄下位機中的數(shù)據(jù),然后通過網(wǎng)絡上傳到上位機。這三部分程序都采用狀態(tài)機方式,方便軟件進行升級和維護。總的軟件結構如圖2所示。

圖2 系統(tǒng)軟件框圖
上位機監(jiān)控軟件
上位機監(jiān)控軟件主要分為兩個部分:仿真過程監(jiān)控和查看仿真數(shù)據(jù)。仿真過程監(jiān)控包括參數(shù)調用、仿真控制、參數(shù)實時監(jiān)控、仿真過程中駕駛員輸入等功能,并且可以對仿真模式、換檔策略、仿真時間等進行配置,方便靈活地實現(xiàn)各種情況的仿真。
查看仿真數(shù)據(jù)部分,可以觀察對比仿真數(shù)據(jù),仿真過程中車輛運動回放、數(shù)據(jù)保存和調用情況。仿真過程控制界面如圖3所示。

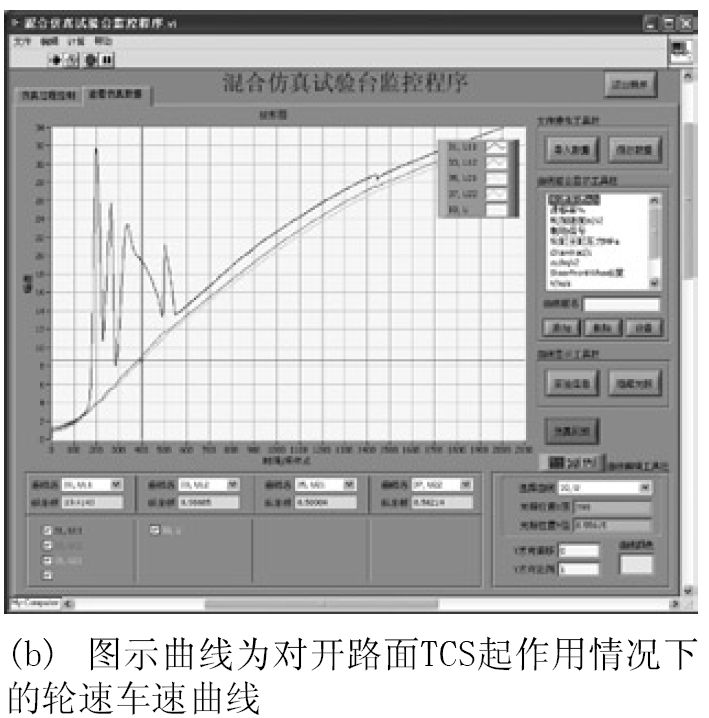
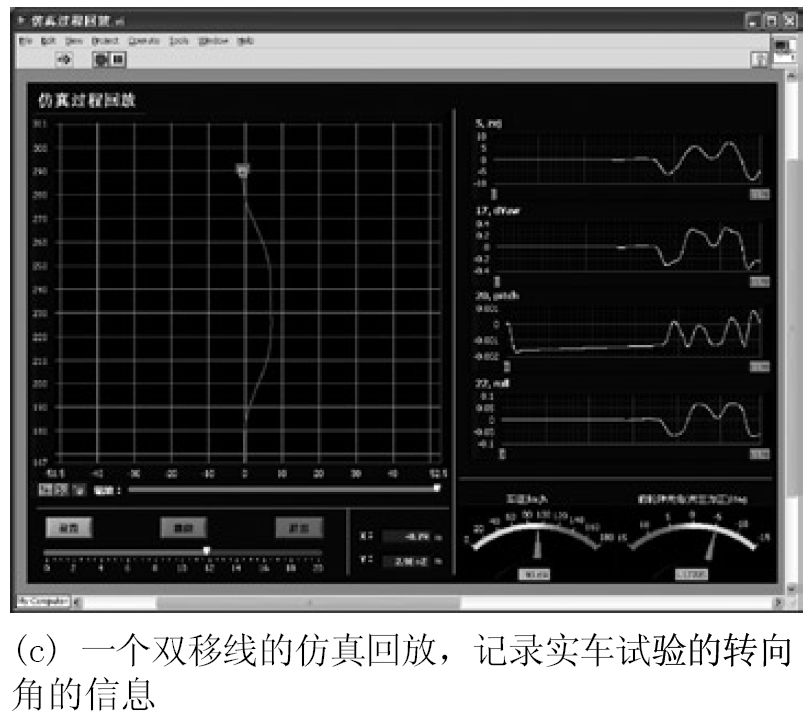
圖3 仿真界面
其中,圖3(b)中可以觀察仿真過程中70個參數(shù)的變化曲線。可以保存和調用仿真數(shù)據(jù),可以通過點擊右下方的“仿真回放”按鍵,圖像化顯示車輛運行軌跡。 圖3(c)中,可以將記錄下的轉向角信息在仿真過程中按照實際的時間間隔輸入給系統(tǒng),仿真可以得到車輛的響應情況。
下位機仿真軟件
下位機運行整車模型,采用了15自由度整車模型。這15個自由度分別為:車輛縱向、橫向、垂向的平動和轉動這6個自由度,四個車輪的轉動和垂向平動8個自由度,轉向系統(tǒng)的1個自由度。
在仿真過程中,下位機以1ms為周期通過數(shù)據(jù)采集卡采集主缸和4個輪缸的壓力信號,從而計算車輛受力,得到車輛運動狀態(tài)。并將狀態(tài)參數(shù)通過數(shù)據(jù)采集卡輸出給控制器。同時下位機將車輛運動狀態(tài)參數(shù)以10ms為周期將數(shù)據(jù)保存在下位機內(nèi)存中,仿真結束后上傳到上位機。并且下位機以10ms為周期不斷檢測上位機所發(fā)出的控制信號,比如轉向信號、換檔信號、油門信號等。這種并行結構的實現(xiàn),使得復雜的功能得以方便地實現(xiàn)。
控制器軟件
控制器上運行的為ESP控制算法。控制器通過接收各種傳感器的信號,判斷車輛狀態(tài)是否為危險工況,如果檢測到危險,就會輸出控制指令給執(zhí)行器,通過電機和電磁閥的動作來對制動系統(tǒng)進行主動干預,同時通過CAN通信發(fā)指令給發(fā)動機管理系統(tǒng),控制車輛驅動,從而化解危機。考慮試驗臺的兼容性,控制器部分可以采用NI cRIO作為控制器,并采用第一代ESP控制器(主控芯片為C167),也可以采用第二代ESP控制器(主控芯片為XC164)。
仿真結果
將仿真結果與實車試驗結果相對比,兩者吻合程度很好,說明該硬件在環(huán)仿真平臺能有效地對車輛運動狀態(tài)進行仿真。該仿真平臺的搭建可以加速ESP控制算法的開發(fā)。
圖4為在某種參數(shù)下測試ABS功能的一組輪速數(shù)據(jù),和實車試驗結果很類似,說明仿真平臺精度很高。
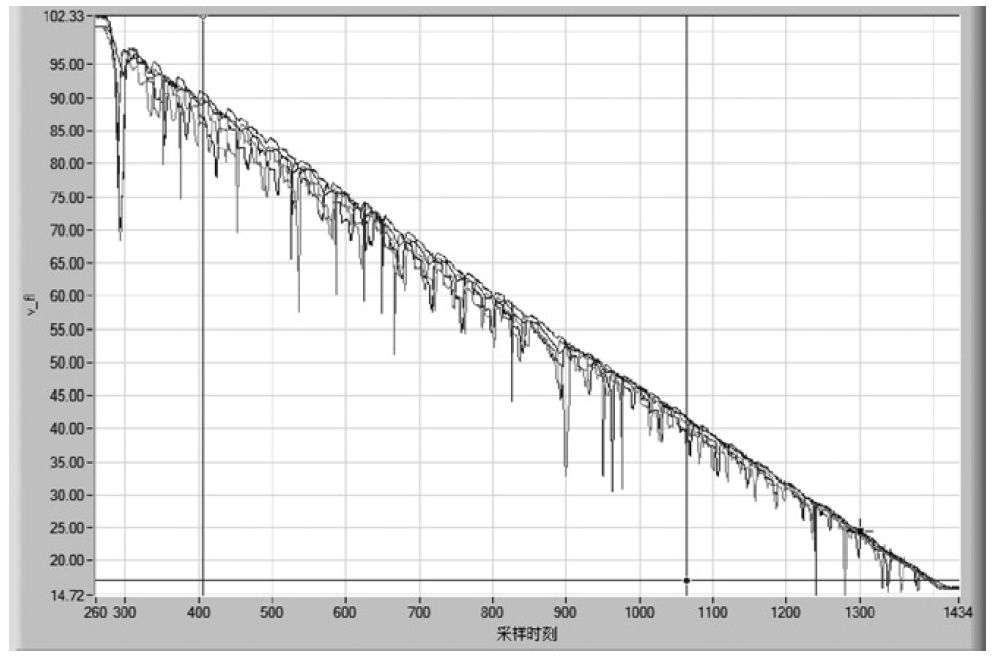
圖4 某種參數(shù)下測試AVS功能的一組輪速數(shù)據(jù)
結論
本文基于PXI和cRIO搭建了ESP硬件在環(huán)仿真平臺。平臺可以將控制器放在仿真回路中,方便對控制器中的算法進行測試。仿真試驗臺的搭建提高了ESP控制算法的開發(fā)速度。