
目前,國(guó)內(nèi)研究和開發(fā)數(shù)控定位裝置的單位都在研制各種經(jīng)濟(jì)型的工作臺(tái)產(chǎn)品,一般定位精度為1 μm、5 μm、10 μm。工作臺(tái)的結(jié)構(gòu)布局、位移量的大小、測(cè)量速度等都越來(lái)越趨于靈活,自動(dòng)化程度也越來(lái)越高,但是這些工作臺(tái)大多數(shù)都是單機(jī)監(jiān)控的分散結(jié)構(gòu),有些是通過(guò)RS485、現(xiàn)場(chǎng)總線、PLC等把設(shè)備連接在一起,構(gòu)成簡(jiǎn)單的DCS或FCS網(wǎng)絡(luò)測(cè)量系統(tǒng)。利用這些方法構(gòu)成的系統(tǒng)具有成本高、測(cè)量范圍小、速度低、不穩(wěn)定和支持應(yīng)用有限等缺陷,因而其發(fā)展受到了極大的限制。相反,工業(yè)以太網(wǎng)以其統(tǒng)一的TCP/IP協(xié)議和CSMA/CD多路訪問(wèn)方式使其得到了迅猛發(fā)展,以太網(wǎng)不僅具有廉價(jià)、高速、簡(jiǎn)易、方便的特性,而且傳輸速率高、信息量大、兼容性強(qiáng),所以受到許多工業(yè)監(jiān)控現(xiàn)場(chǎng)總線開發(fā)機(jī)構(gòu)的高度重視。
本文介紹的基于EPA的光柵位移測(cè)量系統(tǒng),具有功能易于拓展、聯(lián)網(wǎng)方便、造價(jià)低廉的特點(diǎn),可很好地滿足航空航天、精密機(jī)械儀器、數(shù)控機(jī)床等領(lǐng)域中精密位移測(cè)量及定位的需要。
1 光柵位移測(cè)量系統(tǒng)硬件選型
1.1 主控制器DS80C410微處理器
DS80C410是快速的與8051兼容的高度集成的網(wǎng)絡(luò)微控制器。它執(zhí)行指令的速度比普通的8051快3倍。它的外圍設(shè)備包括10/100 Mbps的以太網(wǎng)MAC,2個(gè)串行端口,1個(gè)CAN2.0控制器,1個(gè)l-wrie控制器和64個(gè)I/O引腳。為了能訪問(wèn)網(wǎng)絡(luò),ROM里嵌入了完全的TCPIPv4/6協(xié)議棧和操作系統(tǒng)。網(wǎng)絡(luò)協(xié)議棧同時(shí)支持32個(gè)TCP連接而且可以通過(guò)以太網(wǎng)MAC以5 Mbps的速率傳輸數(shù)據(jù)。
對(duì)于半雙工操作模式,DS80C410和網(wǎng)絡(luò)上其他節(jié)點(diǎn)一起共享以太網(wǎng)物理介質(zhì)。DS80C410訪問(wèn)物理介質(zhì)時(shí)遵守以太網(wǎng)的帶沖突檢測(cè)的載波偵聽多路訪問(wèn)協(xié)議(CS-MA/CD)。MAC在試圖發(fā)送以前等待物理載體空閑。由于網(wǎng)絡(luò)中有很多節(jié)點(diǎn),所以在發(fā)送時(shí)不同的節(jié)點(diǎn)可能發(fā)生沖突。當(dāng)檢測(cè)到?jīng)_突時(shí),MAC在嘗試再次發(fā)送前等待一個(gè)隨機(jī)時(shí)隙。除非有指令干涉,否則MAC再嘗試發(fā)送這個(gè)沖突幀,發(fā)送16次以后自動(dòng)放棄這個(gè)發(fā)送幀。對(duì)于全雙工通信模式,物理介質(zhì)和DS80C410直接連接到另外一個(gè)節(jié)點(diǎn)上,允許同時(shí)發(fā)送和接收數(shù)據(jù),而不會(huì)發(fā)生沖突,因此不需要介質(zhì)訪問(wèn)方法。對(duì)于全雙工通信,流控制機(jī)制使用PAUSE控制幀。當(dāng)需要時(shí)間釋放接收數(shù)據(jù)緩沖區(qū)時(shí),DS80C410可以初始化PSUSE幀,請(qǐng)求其他的嘗試發(fā)送幀的節(jié)點(diǎn)掛起幾個(gè)時(shí)隙。
和其他單片機(jī)相比,DS80C410的指令操作功能強(qiáng)大,不需要外擴(kuò)存儲(chǔ)器。內(nèi)部集成的2個(gè)串口,便于整個(gè)系統(tǒng)的功能升級(jí)和擴(kuò)展。除了組建工業(yè)以太網(wǎng)接口電路所用到的端口外,還有大量的閑置端口可以用來(lái)實(shí)現(xiàn)其他用途,同時(shí)系統(tǒng)能夠?qū)崿F(xiàn)在工業(yè)現(xiàn)場(chǎng)以10/100 Mbps的網(wǎng)絡(luò)傳輸速度進(jìn)行實(shí)時(shí)通信,便于系統(tǒng)實(shí)現(xiàn)網(wǎng)絡(luò)化測(cè)試。另外,它執(zhí)行指令的速度比普通的8051快3倍,所以有利于提高系統(tǒng)的響應(yīng)時(shí)間。綜合考慮之后,選擇DS80C410作為整個(gè)光柵位移測(cè)量系統(tǒng)的主控制器。
1.2 以太網(wǎng)收發(fā)芯片LXT972ALC
本設(shè)計(jì)中需要一個(gè)傳輸介質(zhì)為雙絞線的以太網(wǎng)接口,這里采用的Intel公司的LXT972ALC就是這樣一個(gè)接收發(fā)送芯片。它遵守快速以太網(wǎng)協(xié)議,支持10/100 MbpsMAC標(biāo)準(zhǔn)。LXT972ALC設(shè)備實(shí)現(xiàn)了標(biāo)準(zhǔn)IEEE802.3定義的MII。提供了從MAC到LXT972ALC數(shù)據(jù)傳輸?shù)莫?dú)立通道。每一個(gè)通道都有各自的時(shí)鐘、數(shù)據(jù)總線和控制信號(hào)。
1.3 網(wǎng)絡(luò)變壓器
以太網(wǎng)收發(fā)芯片LXT972ALC輸出數(shù)據(jù)還要通過(guò)網(wǎng)絡(luò)隔離變壓器實(shí)現(xiàn)對(duì)信號(hào)的處理,網(wǎng)絡(luò)隔離變壓器的作用就是把信號(hào)轉(zhuǎn)換成平衡信號(hào)傳輸,以減少共模干擾,提高數(shù)據(jù)傳輸距離。設(shè)計(jì)中采用了Belfuse的S558-5999-T7網(wǎng)絡(luò)隔離變壓器。變壓器的兩個(gè)輸入和兩個(gè)輸出分別連接以太網(wǎng)收發(fā)芯片LXT972ALC的TPIP/N、TPOP/N和RJ45。
2 傳感器
傳感器的類型是多種多樣的,其優(yōu)缺點(diǎn)也各有側(cè)重。相比較而言,光柵傳感器不僅具有高速、高精度、非接觸測(cè)量等優(yōu)點(diǎn),而且位移檢測(cè)有較大的放大率以及誤差平均效應(yīng),所以廣泛應(yīng)用于位移精密測(cè)量和精密定位控制領(lǐng)域。
2.1 光柵位移測(cè)量的基本原理
光柵傳感器主要是由標(biāo)尺光柵、指示光柵和光電器件(發(fā)光和光敏器件)組成,當(dāng)兩塊光柵以微小夾角重疊時(shí)會(huì)產(chǎn)生干涉,在與光柵刻線大致垂直的方向上形成亮暗相間的干涉條紋,即所謂莫爾條紋。隨著兩光柵的相對(duì)移動(dòng),條紋也發(fā)生移動(dòng),在固定的光敏器件上就會(huì)有光的亮暗變化,對(duì)亮暗變化周期進(jìn)行計(jì)數(shù),按照一定的對(duì)應(yīng)關(guān)系即可計(jì)算出兩光柵的相對(duì)位移,這就是光柵測(cè)量位移的基本原理。一般,莫爾條紋的寬度遠(yuǎn)大于光柵柵格的寬度,因而,莫爾條紋實(shí)際上起到了光學(xué)放大作用。其放大倍數(shù)為

其中T為莫爾條紋的間距,d為光柵的柵格寬度,θ為兩光柵刻線夾角(單位為弧度)。光柵的柵格寬度是直接影響測(cè)量分辨率和精度的重要因素。對(duì)于不同的光柵尺,其測(cè)量的分辨率、精度以及量程都不一樣。光柵傳感器的柵距通常為0.02 mm(50線對(duì)/mm)、0.04 mm(25線對(duì),/mm)。輸出信號(hào)有相位角差90°的兩路方波信號(hào)和相位角依次差90°的四路正弦信號(hào)。由于方波信號(hào)為數(shù)字量,不需要A/D轉(zhuǎn)換,DS80C410就可以直接進(jìn)行處理,所以本文重點(diǎn)討論方波輸入信號(hào),而對(duì)于正弦波信號(hào),經(jīng)過(guò)整形可變?yōu)榉讲ㄐ盘?hào)輸出。
本文采用高閾值邏輯(HTL)信號(hào)輸出的SGC-4.2光柵尺作為位移測(cè)量元件。這種光柵尺的特點(diǎn)是閾值電壓比較高,因此它的噪聲容限比較大,有較強(qiáng)的抗干擾能力。它的主要缺點(diǎn)是工作速度比較低,所以多用在對(duì)工作速度要求不高而對(duì)抗干擾能力要求較高的一些工業(yè)控制設(shè)備中。
2.2 四倍頻電路設(shè)計(jì)原理
在實(shí)際應(yīng)用中,光柵傳感器輸出兩路相位相差為90°的方波信號(hào)A和B。如圖1所示,用A、B兩相信號(hào)的脈沖數(shù)表示光柵走過(guò)的位移量,標(biāo)志光柵分正向與反向移動(dòng)。四倍頻后的信號(hào)經(jīng)計(jì)數(shù)器計(jì)數(shù)后轉(zhuǎn)化為相對(duì)位置。實(shí)現(xiàn)計(jì)數(shù)過(guò)程一般有兩種方法:一是由微處理器內(nèi)部定時(shí)計(jì)數(shù)器實(shí)現(xiàn);二是由可逆計(jì)數(shù)器實(shí)現(xiàn)對(duì)正反向脈沖的計(jì)數(shù)。

光柵信號(hào)A、B有以下關(guān)系:
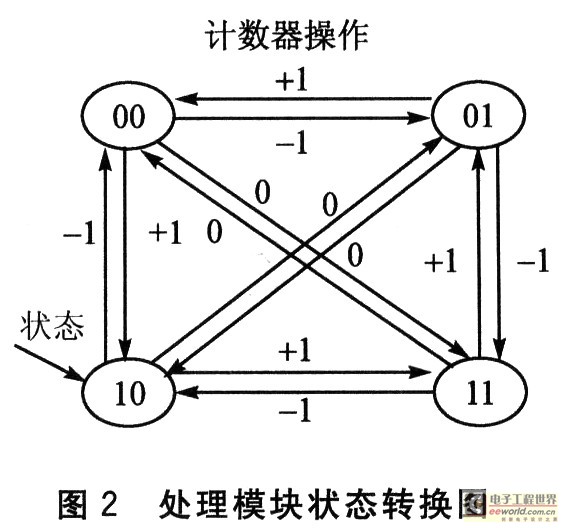
①當(dāng)光柵正向移動(dòng)時(shí),光柵輸出的A相信號(hào)的相位超前B相90°,則在一個(gè)周期內(nèi),兩相信號(hào)共有4次相對(duì)變化:00-10-11-01-00。這樣:每發(fā)生1次變化,可逆計(jì)數(shù)器便實(shí)現(xiàn)1次加計(jì)數(shù),1個(gè)周期內(nèi)共可實(shí)現(xiàn)4次加計(jì)數(shù),從而實(shí)現(xiàn)正轉(zhuǎn)狀態(tài)的四倍頻計(jì)數(shù)。
②當(dāng)光柵反向移動(dòng)時(shí),光柵輸出的A相信號(hào)的相位滯后于B相信號(hào)90°,則一個(gè)周期內(nèi)兩相信號(hào)也有4次相對(duì)變化:00-01-11-10-00。同理,如果每發(fā)生1次變化,可逆計(jì)數(shù)器便實(shí)現(xiàn)1次減計(jì)數(shù),在1個(gè)周期內(nèi),共可實(shí)現(xiàn)4次減計(jì)數(shù),就實(shí)現(xiàn)了反轉(zhuǎn)狀態(tài)的四倍頻計(jì)數(shù)。
③當(dāng)線路受到干擾或出現(xiàn)故障時(shí),可能出現(xiàn)其他狀態(tài)轉(zhuǎn)換,此時(shí)計(jì)數(shù)器不進(jìn)行計(jì)數(shù)操作。
綜合上述分析,可以做出處理模塊狀態(tài)轉(zhuǎn)換圖,如圖2所示。其中“+”、“-”分別表示計(jì)數(shù)器加/減1,“0”表示計(jì)數(shù)器不動(dòng)作。
3 光柵位移測(cè)量系統(tǒng)的總體設(shè)計(jì)
光柵位移測(cè)量系統(tǒng)的結(jié)構(gòu)框圖如圖3所示。系統(tǒng)工作時(shí),SGC-4.2光柵尺將位置信號(hào)先轉(zhuǎn)化成HTL電壓信號(hào)輸出,經(jīng)過(guò)調(diào)理電路濾波和整流后,處理成標(biāo)準(zhǔn)的方波信號(hào)。然后控制器DS80C410通過(guò)內(nèi)部高速計(jì)數(shù)器對(duì)外部的方波信號(hào)進(jìn)行計(jì)數(shù)運(yùn)算。一方面向伺服驅(qū)動(dòng)器發(fā)布電機(jī)動(dòng)作指令,控制電機(jī)驅(qū)動(dòng)位移執(zhí)行機(jī)構(gòu)運(yùn)動(dòng);另一方面通過(guò)以太網(wǎng)收發(fā)芯片XT972ALC進(jìn)行讀寫操作,將工業(yè)現(xiàn)場(chǎng)的測(cè)量信息上傳到工業(yè)以太網(wǎng)絡(luò)上,便于管理者進(jìn)行全局決策。

4 光柵位移測(cè)量系統(tǒng)的硬件設(shè)計(jì)
光柵位移測(cè)量系統(tǒng)的硬件實(shí)現(xiàn)主要包括位移檢測(cè)電路、電源電路、人機(jī)接口和聲光報(bào)警電路以及工業(yè)以太網(wǎng)接口電路的設(shè)計(jì)。
4.1 基于集成芯片的光柵位移檢測(cè)電路
光柵信號(hào)檢測(cè)電路可以由光敏三極管、比較器LM339、2片74193串聯(lián)組成。但是這種設(shè)計(jì)方案往往需要增加較多的可編程計(jì)數(shù)器,電路元器件眾多、結(jié)構(gòu)復(fù)雜、功耗增加、穩(wěn)定性下降。因此,本文對(duì)經(jīng)過(guò)SGC-4.2型光柵尺(50線/mm)出來(lái)的脈沖信號(hào)進(jìn)行倍頻處理時(shí),選擇4倍頻專用集成電路芯片QA740210來(lái)實(shí)現(xiàn),對(duì)信號(hào)4細(xì)分后,可得分辨率為5μm的計(jì)數(shù)脈沖,這在工業(yè)測(cè)控中已達(dá)到了很高的精確度。QA740210集成電路可將兩路正交的方波進(jìn)行四倍頻,并能根據(jù)輸入信號(hào)的相位關(guān)系進(jìn)行相位判別,產(chǎn)生2路加、減計(jì)數(shù)信號(hào),可直接送到DS80C410高速計(jì)數(shù)器進(jìn)行計(jì)數(shù)。
為了使QA740210正常工作,需要設(shè)計(jì)由X0、X1、X2構(gòu)成的振蕩器。振蕩頻率與電源電壓無(wú)關(guān),僅取決于充電和放電的總時(shí)間常數(shù),即與R1和C1的值有關(guān)。本文選用R1=100 Ω,C1=10μF,所示振蕩頻率f=250 kHz。具體的實(shí)現(xiàn)電路如圖4所示。
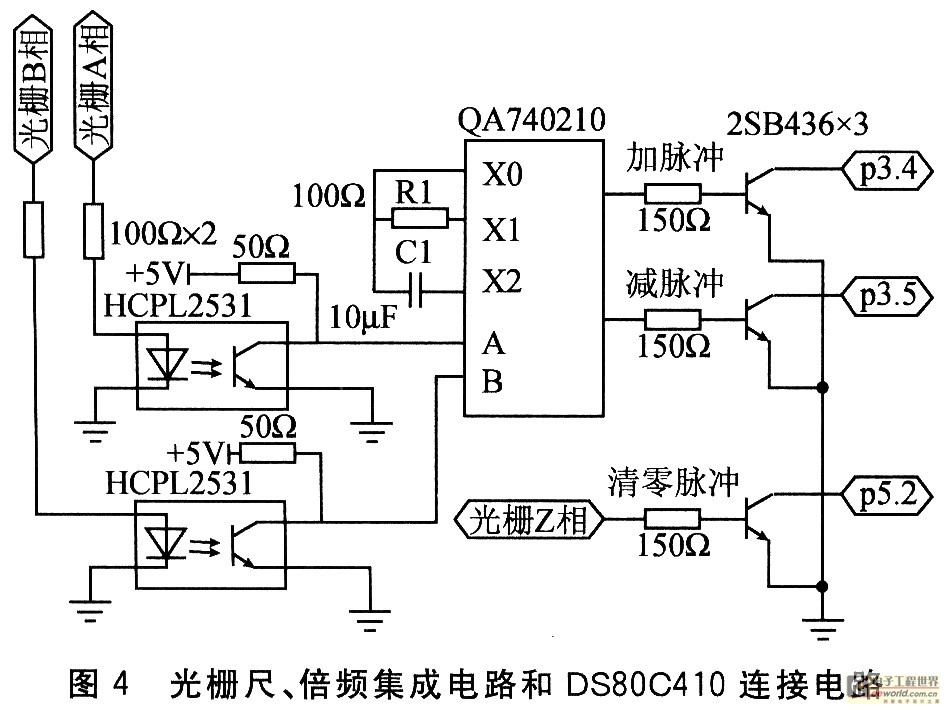
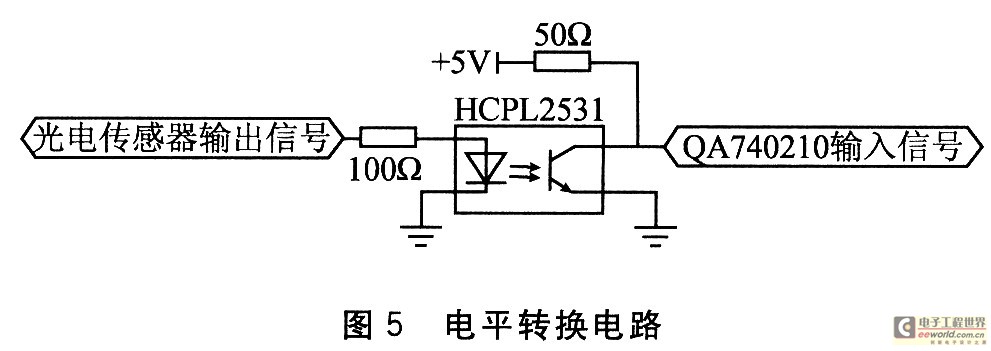
SGC-4.2型光柵傳感器輸出的是HTL方波信號(hào),而QA740210的工作電壓為+5 V,所以必須通過(guò)電平轉(zhuǎn)換才能實(shí)現(xiàn)倍頻脈沖的輸出。電平轉(zhuǎn)換電路如圖5所示。
4.2 電源電路
在進(jìn)行整個(gè)控制系統(tǒng)設(shè)計(jì)時(shí),如果電源系統(tǒng)過(guò)于復(fù)雜和冗余,不僅會(huì)對(duì)其他部分電路產(chǎn)生電磁干擾,而且經(jīng)濟(jì)效益也不好,所以設(shè)計(jì)中所有芯片都選擇的是5 V、3.3 V或者1.8 V供電電壓。這樣,電源設(shè)計(jì)時(shí)只要用3片LM2596和一些電容、電感、二極管等就可以將24 V電壓直接轉(zhuǎn)化為所需電壓,電路設(shè)計(jì)不僅容易,也非常經(jīng)濟(jì),電源電路如圖6所示。具體使用時(shí)可以根據(jù)需要選擇LM2596-5V、LM2596-3.3V、LM2596-1.8V的芯片。要獲得+1.8 V和+5 V時(shí)用圖6(a)的接法,要獲得+3.3 V時(shí),用圖6(b)的接法。

4.3 人機(jī)接口和聲光報(bào)警電路
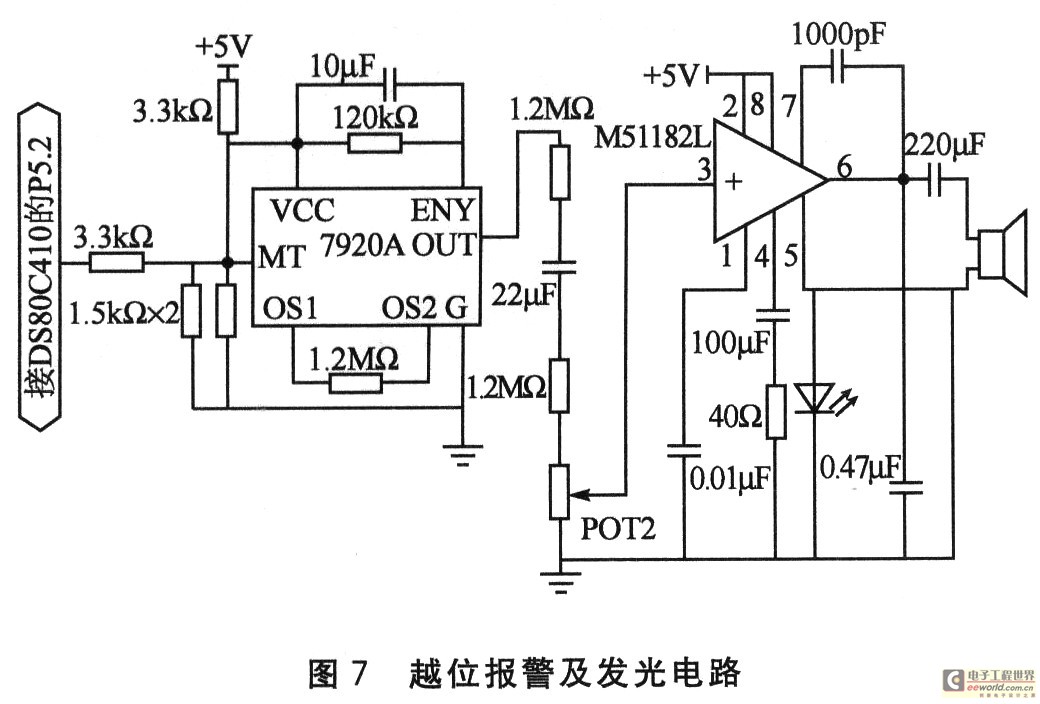
為限制位移執(zhí)行機(jī)構(gòu)在規(guī)定的范圍內(nèi)運(yùn)動(dòng),必須用軟件設(shè)置限位開關(guān),每一邊界有一限位開關(guān)。當(dāng)撞到限位開關(guān)時(shí),通過(guò)DS80C410從輸出端口P5.2輸出一個(gè)“1”電平,經(jīng)電阻分壓后,7920A的控制端MT得到約+1.5 V的電壓,于是從其樂(lè)曲信號(hào)輸出端OUT輸出華爾茲樂(lè)曲信號(hào),經(jīng)過(guò)放大電路M51182L放大后,驅(qū)動(dòng)揚(yáng)聲器發(fā)出相應(yīng)的報(bào)警樂(lè)曲聲,音量的大小可以通過(guò)調(diào)整10 kΩ電位器來(lái)實(shí)現(xiàn)。同時(shí)接通發(fā)光二極管,紅燈報(bào)警,同時(shí)控制電機(jī)停止運(yùn)轉(zhuǎn)。具體電路如圖7所示。
4.4 工業(yè)以太網(wǎng)接口電路
工業(yè)以太網(wǎng)接口電路是由微控制器DS80C410、以太網(wǎng)收發(fā)器LXT972ALC、網(wǎng)絡(luò)隔離變壓器S558-5999-T7、RJ45接頭和雙膠線等組成。以太網(wǎng)接口電路的作用,一方面是將工業(yè)現(xiàn)場(chǎng)的觀測(cè)數(shù)據(jù)上傳到以太網(wǎng)絡(luò)上,便于相關(guān)的管理部門或個(gè)人進(jìn)行決策管理;另一方面是將工業(yè)以太網(wǎng)的數(shù)據(jù)及操作命令傳送到工業(yè)現(xiàn)場(chǎng),管理現(xiàn)場(chǎng)的測(cè)量系統(tǒng)進(jìn)行實(shí)時(shí)有效的工作。當(dāng)只進(jìn)行現(xiàn)場(chǎng)測(cè)量工作,而不需要進(jìn)行以太網(wǎng)通信時(shí),可以由微控制器DS80C410直接控制整個(gè)現(xiàn)場(chǎng)設(shè)備。所以測(cè)量系統(tǒng)既具有單系統(tǒng)現(xiàn)場(chǎng)測(cè)量的可操作性,又具有網(wǎng)絡(luò)化測(cè)量的便捷性的優(yōu)點(diǎn)。整個(gè)工業(yè)以太網(wǎng)接口電路略。
5 提高測(cè)量分辨率及精度的措施
5.1 溫度對(duì)測(cè)量精度的影響及補(bǔ)償
由于熱脹冷縮的作用,光柵刻線的間距會(huì)隨溫度而變化,這勢(shì)必會(huì)影響測(cè)量的精度。在溫度變化較大而對(duì)精度的要求又比較高的場(chǎng)合,必須對(duì)溫度進(jìn)行補(bǔ)償。對(duì)于相同的材料和相同的結(jié)構(gòu)形式,其溫度引起形變的特性是相同的。補(bǔ)償?shù)牟襟E是設(shè)定環(huán)境溫度在20℃時(shí)光柵的輸出為沒(méi)有溫度誤差的標(biāo)準(zhǔn)輸出,在20℃附近選擇一系列等間隔溫度點(diǎn),經(jīng)過(guò)若干溫度的正(反)行程,在這些溫度點(diǎn)上測(cè)出柵尺的總體形變值,得出溫度形變相關(guān)數(shù)據(jù)。利用這些數(shù)據(jù)進(jìn)行特性曲線的擬合,擬合曲線即可進(jìn)行對(duì)溫度誤差的修正。擬合的曲線的多項(xiàng)式選擇二階或三階就足夠了,形式為:
ε=a3t3+a2t2+azt+a0 (2)
式中ε為光柵尺的形變,t為溫度,ai為待定系數(shù)。擬合方法采用最小二乘法,求得的擬合多項(xiàng)式即表示了溫度與光柵形變的近似關(guān)系。進(jìn)行補(bǔ)償時(shí)有兩種辦法:一是將曲線的系數(shù)存于非易失性存儲(chǔ)器中,修正時(shí)直接計(jì)算以上多項(xiàng)式;另一種是將以上曲線做成表格,補(bǔ)償時(shí),查表并插值。
5.2 提高系統(tǒng)抗干擾能力
光柵傳感器在具有振動(dòng)的環(huán)境下進(jìn)行測(cè)量時(shí),經(jīng)常遇到干擾。在A相或B相的邊緣處,即在電平跳變處,由于微小的振動(dòng),會(huì)在邊緣處出現(xiàn)無(wú)數(shù)的小尖峰,使計(jì)數(shù)器誤觸發(fā)影響了計(jì)數(shù)精度。為此可以采用定時(shí)/計(jì)數(shù)器的飛讀或利用對(duì)脈沖有效性判斷等方法來(lái)提高系統(tǒng)的測(cè)量精度。