引言
在火電廠控制系統(tǒng)中,主汽溫度控制一直是難以解決的問(wèn)題,這主要是因?yàn)槠麥乜刂茖?duì)象具有大延時(shí)、大慣性和時(shí)變性的特點(diǎn),采用常規(guī)和簡(jiǎn)單的控制規(guī)律均難以獲得較好的調(diào)節(jié)效果。
目前,工程中常用的汽溫控制系統(tǒng)采用的是最基本的串級(jí)調(diào)節(jié)和具有導(dǎo)前微分的雙回路控制結(jié)構(gòu),并在此基礎(chǔ)上引人Simith預(yù)估和參數(shù)自適應(yīng)等控制策略。但以上控制策略的共同缺點(diǎn)是克服系統(tǒng)的純滯后性和大慣性環(huán)節(jié)的能力較弱。為了提高控制精度,本設(shè)計(jì)采用西門子公司主汽溫度控制策略。
一、控制系統(tǒng)特點(diǎn)分析
1.1控制原理
西門子公司汽溫控制系統(tǒng)原理如圖1所示,這是一個(gè)具有導(dǎo)前溫度信號(hào)的雙回路汽溫調(diào)節(jié)系統(tǒng)。內(nèi)回路采用[(1-PTn)*導(dǎo)前溫度]為反饋信號(hào)。它相當(dāng)于一個(gè)實(shí)際微分環(huán)節(jié),動(dòng)態(tài)時(shí)使PTn模塊的輸出近似與主汽溫相等,從而改善主汽溫調(diào)節(jié)對(duì)象的動(dòng)態(tài)特性;穩(wěn)態(tài)時(shí)內(nèi)回路輸出為零,使過(guò)熱器出口汽溫等于給定值。外回路的作用是根據(jù)過(guò)熱器的運(yùn)行工況,對(duì)控制器的參數(shù)進(jìn)行增益調(diào)整。
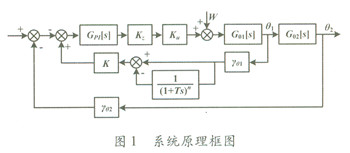

則圖l可簡(jiǎn)化為圖2所示框圖,即系統(tǒng)由原來(lái)的雙回路控制系統(tǒng)簡(jiǎn)化為單回路控制系統(tǒng)。

1.2 PTn模塊的整定
為了便于對(duì)汽溫控制系統(tǒng)進(jìn)行整定,西門子公司給出了PTn 模塊的擬合參數(shù)表。本文選擇n=6 ,如表1所示。表1中:Tu為鍋爐減溫水流量的線性函數(shù);Tg為鍋爐負(fù)荷(主汽流量)的線性函數(shù)。
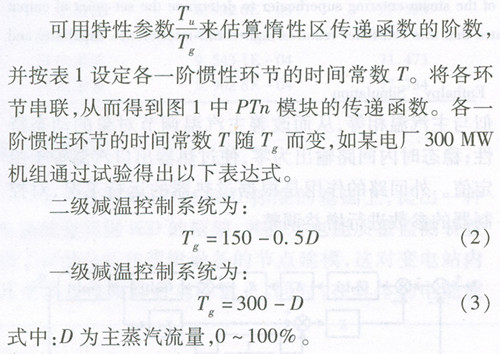
通過(guò)減溫水階躍擾動(dòng)試驗(yàn),得出主汽溫和二級(jí)減溫器出口汽溫(導(dǎo)前汽溫)的階躍響應(yīng)曲線,再由主汽溫和導(dǎo)前汽溫響應(yīng)曲線可估算出惰性區(qū)的傳遞函數(shù)。
1.3變?cè)鲆婊芈返恼?br />
在不同運(yùn)行工況下,減溫水流量擾動(dòng)下汽溫控制對(duì)象的動(dòng)態(tài)特性存在著較大的差異。因此,為了獲得較好的調(diào)節(jié)效果,應(yīng)在不同工況下進(jìn)行試驗(yàn),并采用變參數(shù)調(diào)節(jié)。圖1中內(nèi)回路的作用就是根據(jù)過(guò)熱器的運(yùn)行工況,對(duì)控制器的參數(shù)K進(jìn)行增益調(diào)整。西門子公司給出了變?cè)鲆婊芈返慕?jīng)驗(yàn)整定方法。
1.4 變?cè)鲆婵刂?br />
主蒸汽的燴值表示每1kg蒸汽應(yīng)具有的熱值,主蒸汽每變化1℃所對(duì)應(yīng)的燴差變化表示每1kg蒸汽所需的熱值改變。根據(jù)水蒸氣熱力性質(zhì)表,在不同汽壓和汽溫工況下,過(guò)熱蒸汽的燴差變化是不同的。因此,汽溫控制對(duì)象的動(dòng)態(tài)特性是隨著運(yùn)行工況而發(fā)生改變的。根據(jù)燴差變化進(jìn)行變?cè)鲆婵刂剖墙陙?lái)西門子在汽溫控制中采用較多的方法。
汽溫每變化1℃所需的減溫水量取決于在不同汽壓和汽溫下過(guò)熱蒸汽的燴差變化。在一定的汽壓和汽溫范圍內(nèi),增益調(diào)整值是燴差的線性函數(shù)。
根據(jù)減溫水作用的區(qū)域,取導(dǎo)前汽溫作為燴差計(jì)算的汽溫參數(shù),汽壓參數(shù)則取主汽壓力信號(hào),輸人燴值計(jì)算表,即可得出汽溫每變化1℃的焓差值。
二、仿真研究
本文采用Simulink對(duì)西門子公司主汽溫度控制策略進(jìn)行仿真研究川,并與串級(jí)汽溫控制系統(tǒng)進(jìn)行比較。仿真結(jié)果如圖3所示。
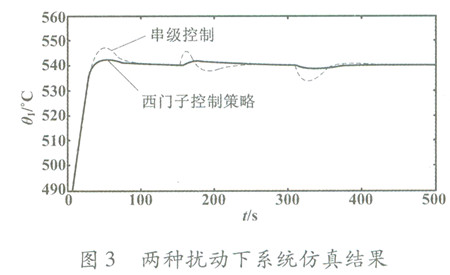
由圖3可以看出,系統(tǒng)分別在t=150s時(shí)加人定值擾動(dòng)和在,t=300s時(shí)加人減溫水流量擾動(dòng)。與傳統(tǒng)的串級(jí)控制相比,西門子主汽溫度控制策略的控制性能具有恢復(fù)時(shí)間快、振動(dòng)幅度小的特點(diǎn)。試驗(yàn)結(jié)果表明,采用西門子主汽溫度控制策略控制主汽溫具有很強(qiáng)的抗干擾能力,其控制品質(zhì)得到很大改善。如果在以上情況下略微調(diào)整參數(shù),其控制品質(zhì)還會(huì)得到進(jìn)一步改善。
總的來(lái)說(shuō),采用西門子主汽溫度控制策略對(duì)模型的不確定因素和內(nèi)外擾動(dòng)均有很好的適應(yīng)能力,其控制品質(zhì)要遠(yuǎn)優(yōu)于常規(guī)的串級(jí)控制。
三、結(jié)束語(yǔ)
本文根據(jù)過(guò)熱器的運(yùn)行工況,通過(guò)采用西門子主汽溫度控制策略,對(duì)控制器的參數(shù)進(jìn)行增益調(diào)整,使過(guò)熱器出口汽溫等于給定值。從仿真結(jié)果來(lái)看,與一般串級(jí)汽溫調(diào)節(jié)系統(tǒng)和具有導(dǎo)前微分信號(hào)的雙回路汽溫調(diào)節(jié)系統(tǒng)相比,西門子主汽溫度控制策略具有更好的調(diào)節(jié)品質(zhì)。
由于僅針對(duì)過(guò)熱汽溫惰性區(qū)的傳遞函數(shù)構(gòu)造數(shù)學(xué)模型,所以該控制策略受對(duì)象特性參數(shù)變化的影響較小,系統(tǒng)的魯棒性較好。由此可見(jiàn),西門子主汽溫度控制策略非常適用于主汽溫控制系統(tǒng)中存在大干擾、大延遲、時(shí)變性、不確定性和非線性的復(fù)雜熱工對(duì)象。
