
引言
超聲波電機(jī)(USM)具有能夠直接輸出低轉(zhuǎn)速大力矩,瞬態(tài)響應(yīng)快(可達(dá)ms量級(jí))、定位精度高(可達(dá)nm量級(jí)),無(wú)電磁干擾等諸多優(yōu)點(diǎn)。USM的運(yùn)行需要有兩路具有一定幅值,相位上正交(或可調(diào)),頻率在20 kHz以上的高頻交流電源。驅(qū)動(dòng)信號(hào)" title="驅(qū)動(dòng)信號(hào)">驅(qū)動(dòng)信號(hào)源的幅值、頻率及相位直接影響USM的性能。為便于USM的性能測(cè)試及研究,需要提供一種在幅值、頻率、相位上均可調(diào)的測(cè)試電源。以往的超聲波驅(qū)動(dòng)器多采用分立器件構(gòu)成如文獻(xiàn),其電路結(jié)構(gòu)復(fù)雜。文獻(xiàn)雖然改用FPGA或CPLD生成,但所生成的信號(hào)頻率變化是不連續(xù)的。文獻(xiàn)是用單片機(jī)和專(zhuān)用的DDS芯片,存在抗干擾性差,可靠性低的弊端。
本文介紹了基于DLL數(shù)字頻率直接合成技術(shù)(DDS)用ALTERA公司的FPGA器件和VHDL語(yǔ)言編程,按相位累加的方法產(chǎn)生兩相四路頻率相位可調(diào)的高頻PWM信號(hào),經(jīng)過(guò)驅(qū)動(dòng)電路、光耦隔離電路作為外部功率控制電路H橋的四個(gè)閘門(mén)驅(qū)動(dòng)信號(hào),H橋主回路接入的是對(duì)市電經(jīng)調(diào)壓、隔離、整流及濾波后的直流電。由閘門(mén)驅(qū)動(dòng)信號(hào)對(duì)該直流電進(jìn)行通斷控制,形成可調(diào)幅值、頻率、相位差的兩相高頻PWM波的交流信號(hào),再經(jīng)外加電感平滑,將PWM波信號(hào)變成類(lèi)正弦波信號(hào),實(shí)現(xiàn)對(duì)USM的性能測(cè)試。
1 功率控制電路
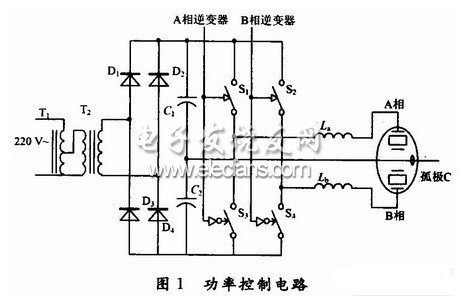
如圖1所示,加于USM的A、B兩相交流信號(hào)是由FPGA產(chǎn)生的四路脈沖信號(hào)控制MOS管開(kāi)關(guān)對(duì)整流濾波后直流電進(jìn)行通斷控制,在圖1所示H橋逆變器的作用下,將直流電逆變?yōu)榕c逆變器開(kāi)關(guān)頻率相同的矩形波" title="矩形波">矩形波交流電,經(jīng)串聯(lián)電感平滑,就得到了USM所需的兩相高頻類(lèi)正弦波信號(hào)。該信號(hào)可由主回路的調(diào)壓器調(diào)節(jié)幅值,A、B兩相的相位差取決于H橋兩側(cè)閘門(mén)驅(qū)動(dòng)信號(hào)的相位差,即閘門(mén)S1與S2(或S3與S4)驅(qū)動(dòng)信號(hào)的相位差。同側(cè)橋臂不能同時(shí)導(dǎo)通,以避免大電流通過(guò)MOS開(kāi)關(guān)管而損壞開(kāi)關(guān)管,理論上同側(cè)的兩個(gè)控制信號(hào)應(yīng)該相位互補(bǔ),實(shí)現(xiàn)推挽輸出,考慮到開(kāi)關(guān)器件的延時(shí)特性,該信號(hào)開(kāi)啟閘門(mén)時(shí)要有一定的延時(shí),即死區(qū)時(shí)間。鑒于以上分析及USM性能測(cè)試的需求,閘門(mén)控制信號(hào)應(yīng)具有頻率、相位、死區(qū)時(shí)間均可調(diào)的占空比" title="占空比">占空比大于50%的PWM高頻波。
 2 PWM調(diào)頻調(diào)相" title="調(diào)頻調(diào)相">調(diào)頻調(diào)相高頻信號(hào)的產(chǎn)生
2 PWM調(diào)頻調(diào)相" title="調(diào)頻調(diào)相">調(diào)頻調(diào)相高頻信號(hào)的產(chǎn)生
參考文獻(xiàn)的DDS設(shè)計(jì),將一個(gè)周期的矩形波幅值進(jìn)行2n等分后按順序存于一個(gè)表格中,用高頻時(shí)鐘fclk依次按表中地址順序讀取其數(shù)據(jù)(幅值)。利用相位累加器可以每隔M個(gè)地址,讀一個(gè)幅值信息。矩形波頻率正比于輸入時(shí)鐘頻率和相位增量M之積,即為基頻時(shí)鐘fclk/2n的M倍。通過(guò)調(diào)節(jié)步距M(頻率控制字)可調(diào)節(jié)信號(hào)的頻率。調(diào)節(jié)首次所讀ROM表的地址,可調(diào)節(jié)矩形波的相位,稱(chēng)該調(diào)節(jié)參數(shù)為相位控制字。若ROM查找表中0,1各占一半則可得到頻率、相位連續(xù)可調(diào)的方波信號(hào);改變表中1的比例,就會(huì)得到不同脈寬的矩形波。若能從外部調(diào)節(jié)1的比例,就生成了一路頻率、相位、占空比可調(diào)的PWM信號(hào)。由于表中只有兩種數(shù)O和1,且均連續(xù)出現(xiàn),因而可用比較器替換ROM表,將原來(lái)的地址發(fā)生計(jì)數(shù)器的計(jì)數(shù)值劃分為2部分,一部分對(duì)輸出信號(hào)清零,另一部分對(duì)其置1。2種方案相比,后者大大節(jié)約了FPGA資源。RTL級(jí)原理圖如圖2所示。
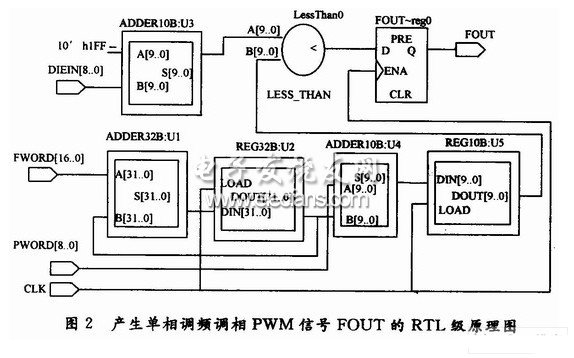
程序設(shè)計(jì)中的FWORD[16..O]為原理描述中的頻率控制字M,連接于32位計(jì)數(shù)器F32[32..6],其輸出信號(hào)FOUT的頻率按如下公式計(jì)算FFOUT=fclk/222·FWORD,頻率分辨率為Fmin=25fclk/222,最大輸出頻率為Fmax=Fmin FWORDmax。當(dāng)系統(tǒng)頻率fclk=50MHz時(shí),F(xiàn)min=0.745 Hz,F(xiàn)max=97.648 kHz,即輸出頻率可在O.7~97.6 Hz之間調(diào)節(jié)。相位控制字為9位,輸出信號(hào)FOUT的相位可按如下公式計(jì)算:POUT=360°/2°×PWORD,最小分辨率為360°/2°=0.7°。DIEIN[8..O]為占空比(死區(qū))調(diào)節(jié)控制字輸入,占空比按計(jì)算公式:(29-DIEIN)/210x1 00%,最大占空比為50%,最小接近于O,占空比的調(diào)節(jié)以使圖一H橋同側(cè)的兩個(gè)MOS管剛好不同時(shí)導(dǎo)通為度(故占空比不能大于50%),占空比太小會(huì)使整個(gè)系統(tǒng)轉(zhuǎn)換效率降低。
以單相調(diào)頻調(diào)相PWM信號(hào)設(shè)計(jì)作為底層元件,利用VHDL的結(jié)構(gòu)化描述方式(例化語(yǔ)句),按相位要求將4個(gè)單相調(diào)頻調(diào)相信號(hào)DDS元件設(shè)置成不同相位來(lái)實(shí)現(xiàn)。相位字PWORD為9位,U0:PWORD=O,初始相位=0;U2:PWORD=“100000000”,初始相位為180°;U1元件的初始相位PWOR-D,U2元件的初始相位為PWORD+“00000000”,這就實(shí)現(xiàn)了UO和U1相位差為PWORD,U0和U2,U1和U2相位差各為180°,從而實(shí)現(xiàn)四路調(diào)頻調(diào)相PWM信號(hào)設(shè)計(jì)。
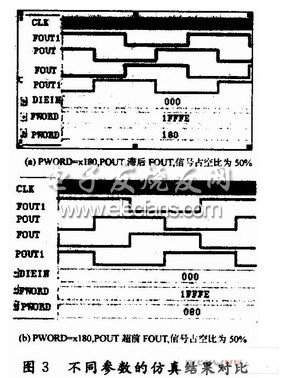
通過(guò)調(diào)節(jié)FWORD、PWORD及DIEIN來(lái)分別調(diào)節(jié)四路輸出信號(hào)的頻率、相位差、四路輸出信號(hào)的占空比。仿真結(jié)果如圖3所示。由仿真圖可知超前90°和滯后90°得到的四路相序正好相反,若用其驅(qū)動(dòng)圖1的4個(gè)開(kāi)關(guān),得到兩相互差90°的信號(hào),一個(gè)為A相超前于B相,另逐個(gè)為A相滯后于B向。用其驅(qū)動(dòng)USM,在不改變電機(jī)連線的情況下,通過(guò)調(diào)節(jié)相位差PWORD,方便的實(shí)現(xiàn)電機(jī)的旋轉(zhuǎn)方向控制。
3 實(shí)驗(yàn)測(cè)試
將上述四路控制信號(hào)下載于FPGA中,再經(jīng)過(guò)資料介紹的驅(qū)動(dòng)隔離模塊后施加于圖1的功率控制電路,通過(guò)示波器測(cè)得USM的A、B兩相波形如圖4所示。將上述電路獲得的信號(hào)應(yīng)用于USM45超聲波電機(jī)的驅(qū)動(dòng)中,該電機(jī)所要求的驅(qū)動(dòng)信號(hào)頻率為45.8 kHz,相位差為90°,峰峰值可達(dá)300 V。將其頻率控制字設(shè)定為FWORD=x0F000,相位控制字為PWORD=x180(或x080),死區(qū)時(shí)間DIEIN=x33~xFF之間調(diào)整,成功地驅(qū)動(dòng)了USM 45電機(jī)。運(yùn)行10 min左右,電機(jī)轉(zhuǎn)速下降,通過(guò)將FWORD調(diào)小至xED00,即信號(hào)頻率為45.2 kHz時(shí),電機(jī)速度又上升到開(kāi)始時(shí)的值(65轉(zhuǎn)/mi n)。超聲波電機(jī)一般工作在定子導(dǎo)納2頻率特性的諧振和反諧振點(diǎn)之間。隨電機(jī)運(yùn)行溫度的升高,導(dǎo)致諧頻率和反諧振頻率約有1.4 kHz的變化。由于USM45電機(jī)功率小,額定功率只有2 W,且是空載測(cè)試,因而溫升較小,諧振頻率的變化也較小(只有大約0.6 kHz的變化)。

4 結(jié)語(yǔ)
由FPGA按照相位累加振蕩器的方法產(chǎn)生的四路調(diào)頻、調(diào)相PWM信號(hào),具有較高頻率分辨率,在保持相位連續(xù)的前提下,能實(shí)現(xiàn)快速頻率切換。該信號(hào)不但在外部的逆變電路作用下,成功地對(duì)USM45電機(jī)進(jìn)行了驅(qū)動(dòng)和測(cè)試,還可通過(guò)外加專(zhuān)用的L298N型驅(qū)動(dòng)芯片方便地應(yīng)用于步進(jìn)電機(jī)和直流電機(jī)的驅(qū)動(dòng)以及步進(jìn)電機(jī)的調(diào)頻調(diào)速和直流電機(jī)的PWM調(diào)速。