
磷酸鐵鋰電池作為新型電動汽車動力電池,具有容量大、安全性高、耐高溫特別是循環(huán)壽命長等優(yōu)點,其循環(huán)壽命比普通的鉛酸電池至少要高4 倍,在車用動力電池的市場中具有極大的應(yīng)用潛力。在現(xiàn)階段動力電池的容量沒有根本性突破的情況下,電池管理系統(tǒng)(battery management system,BMS)在電動車中的應(yīng)用將顯得異常重要,它能夠?qū)崟r檢測動力電池的電壓、電流、溫度,并通過這些參數(shù)估算電池的荷電狀態(tài)(state of charge,SOC),為駕駛員提供車輛續(xù)駛里程參考;此外BMS 能夠?qū)﹄姵氐倪^充、過放電進行報警和保護,對電池組和單節(jié)電池進行有效保護,從而提升電池使用性能、提高電池壽命。LIN 總線是一種低成本的汽車A 類總線,非常適合溫度、電流這類實時性要求不高的數(shù)據(jù)傳輸,通過LIN 總線實現(xiàn)數(shù)據(jù)的總線化傳輸,進一步降低了成本。

1 系統(tǒng)的總體結(jié)構(gòu)與功能
在本設(shè)計中,電池管理系統(tǒng)分為兩大部分:信號檢測模塊、通信及信息處理模塊。在信號檢測模塊中,每節(jié)單體電池對應(yīng)一個底層ECU(DSPic30f4012),可以實現(xiàn)單體電壓采集、電流檢測、溫度采樣;同時也能檢測整個電池組的電壓、電流和環(huán)境溫度,用于電池一般充電與均衡充電時的檢測與保護,如圖1 所示。

底層ECU 把檢測到的電壓、電流、溫度等變量封裝為LIN總線幀格式,然后通過LIN 總線與上層ECU 進行通信。信息處理模塊可以實現(xiàn)動力電池的荷電狀態(tài)實時估算和故障分析,并把溫度、電壓、電流等信息進行顯示。
2 電池管理系統(tǒng)設(shè)計
2.1 電池管理系統(tǒng)的基本硬件設(shè)計
由于電池組的單體數(shù)目比較多,本系統(tǒng)采用分布式結(jié)構(gòu),這種結(jié)構(gòu)能有效減少采樣線穿越電池,降低安裝和調(diào)試的復(fù)雜性,同時也能降低安全隱患。底層ECU 使用Dspic30f4012芯片,它能在-40~125 ℃溫度范圍內(nèi)工作,屬于汽車級芯片;它具有豐富的模擬量、數(shù)字量I/O 接口、10 位A/D 轉(zhuǎn)換功能以及SCI 通信功能等。
2.1.1 信號采集模塊設(shè)計
Dspic30f4012 具有2.5~5.5 V 范圍的寬工作電壓,因而可以用單節(jié)磷酸鐵鋰電池直接供電,只需要加一個0.1 μF 的濾波電容即可使芯片工作,供電電路得到極大簡化。由于F4012 芯片內(nèi)不提供A/D 轉(zhuǎn)換的內(nèi)部基準(zhǔn)電壓,因此在進行電壓檢測時,需要外部提供A/D 轉(zhuǎn)換基準(zhǔn)電壓,本文選用低功耗、低電壓誤差的LM385 來提供2.5 V 的外部基準(zhǔn)電壓,如圖2 所示。
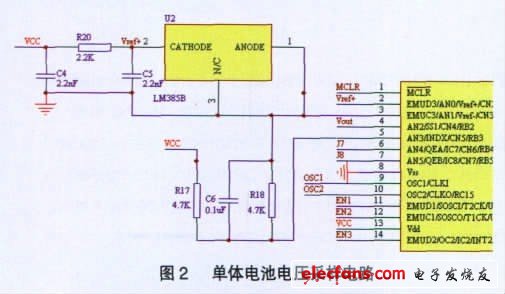
本設(shè)計中電壓檢測模塊的特點是各個檢測模塊分別檢測各自單體電池上的電壓,而不是通過傳統(tǒng)的多路開關(guān)分時選擇的方法來實現(xiàn),這樣就完全實現(xiàn)了純分布式的電池管理結(jié)構(gòu)。磷酸鐵鋰電池的電壓直接從單體電池兩端引出電壓,然后通過兩個高精度的電阻進行分壓,分壓得到的電壓引入Dspic30f4012 芯片內(nèi)部的A/D 模擬信號轉(zhuǎn)換通道,進行電壓的檢測。Dspic30f4012 芯片內(nèi)的A/D 轉(zhuǎn)換器為10 位精度,基準(zhǔn)電壓為2.5 V,所以電壓檢測模塊能夠檢測到0~5 V 的電壓范圍,大于單體電池的最大電壓3.65 V.電池組的總電壓的檢測,經(jīng)由信號衰減電路與抗共模電壓電路接入Dspic30f4012 芯片內(nèi)的A/D 轉(zhuǎn)換通道中完成電池組電壓的采集。
單體電池電流的檢測通過霍爾傳感器來實現(xiàn),霍爾傳感器能輸出最高3 V 的電壓信號,可以直接接入到Dspic30f4012芯片內(nèi)的A/D 采樣通道中;電池的溫度的檢測通過TJ1047溫度檢測芯片來實現(xiàn),TJ1047 溫度檢測芯片在-40 ℃和125 ℃時輸出電壓分別為0.5 V 和1.75 V,并且具有10 mV/℃的溫度電壓比例特性和±0.5 ℃的誤差。因此從TJ1047 芯片輸出的電壓可以直接接入Dspic30f4012 芯片內(nèi)的A/D 轉(zhuǎn)換通道中,即可完成對電池溫度和環(huán)境溫度的采集。
LIN 通信接口設(shè)計
2.1.2 LIN 通信接口設(shè)計
在現(xiàn)代汽車中總線技術(shù)越來越多的得到應(yīng)用,CAN/LIN網(wǎng)絡(luò)已經(jīng)成為以分布式為基礎(chǔ)的車載電子網(wǎng)絡(luò)的主流發(fā)展方向。CAN 總線作為高速傳輸總線具有速度快、帶寬高、功能多的突出特點,但其成本比較昂貴;LIN 總線是一種低端總線,但其在降低成本方面具有突出優(yōu)勢,適合對網(wǎng)絡(luò)速度要求不高、實時性不強的數(shù)據(jù)的傳輸。因此,在不需要CAN 總線的帶寬和速度的場合下,LIN 總線補充了CAN 總線引導(dǎo)的汽車多路復(fù)用網(wǎng)絡(luò)的現(xiàn)有總線技術(shù)。電池的溫度、電流、電壓檢測并不要求極高的實時性和總線速度,因此LIN 總線能很好地契合電池管理系統(tǒng)的要求。
Dspic30f4012 芯片沒有LIN 總線的接口,但具有SCI 通信接口,本文選用TPIC1021 芯片作為SCI 與LIN 總線轉(zhuǎn)換的芯片,如圖3 所示。SCI 通信引腳U1RX 與U1TX 經(jīng)過磁耦合隔離器件電氣隔離后,分別接到LIN 驅(qū)動器的LIN_RXD 和LIN_TXD,經(jīng)過轉(zhuǎn)換最后在LIN 引腳輸出LIN 總線信號。在底層控制器Dspic30f4012 和LIN 收發(fā)器TPIC1021 之間加上一個磁耦合隔離器件ADUM1201ARZ,用來提高電池組檢測系統(tǒng)通信的抗干擾能力和解決分布式檢測中"共地"產(chǎn)生短路的問題,有效地把各個檢測單元的電氣連接隔離開來,同時也把底層電壓與上層LIN 總線隔離開來。當(dāng)LIN 收發(fā)器作為主機節(jié)點時,需要把圖3 中的J3 跳線用跳針短接,用于從機節(jié)點時不要跳針短接。

2.2 電池管理系統(tǒng)軟件設(shè)計
2.2.1 電池管理系統(tǒng)的軟件設(shè)計和總體結(jié)構(gòu)
ECU 中的軟件設(shè)計包括底層ECU 和上層ECU 軟件設(shè)計。底層ECU 的軟件設(shè)計主要包括電壓、電流、溫度的采集程序與采集結(jié)果的計算程序、數(shù)據(jù)通信程序、中斷程序等;上層ECU 的軟件設(shè)計主要包括SOC 估算程序、LIN 總線通信程序、故障分析及報警程序、電壓、電流、溫度和荷電狀態(tài)等顯示程序、時鐘程序、中斷程序等。整個程序設(shè)計采用結(jié)構(gòu)化和模塊化的編程方法來實現(xiàn)。上層ECU 的主程序流程圖如圖4 所示。
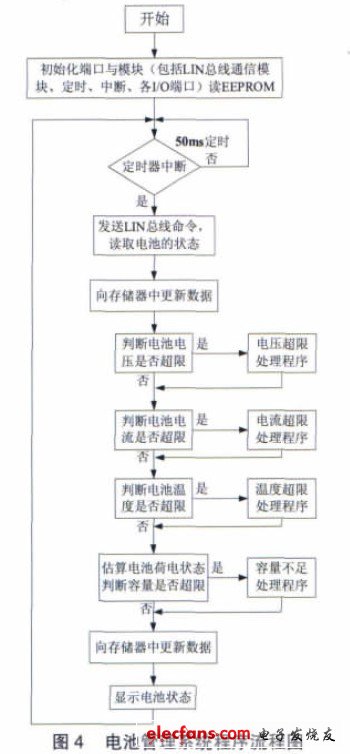
其中,電池的電壓檢測包括單體電池電壓的檢測和電池組電壓的檢測。當(dāng)單體電壓超限時,系統(tǒng)能夠判斷超限單體電池的編號,判斷單體電池是低電壓超限還是高電壓超限,在顯示器上顯示并且有聲音報警。電池組電壓超限時程序能夠分析出是何種原因超限,以此來進入保護程序。電池溫度的檢測包括單體電池溫度的檢測和環(huán)境溫度的檢測,當(dāng)溫度超限時,系統(tǒng)通過檢測到的數(shù)據(jù)能分析溫度超限的原因,以此進入保護程序。電池的荷電狀態(tài)超限主要是指電池剩余電量過低,繼續(xù)放電可能會影響電池的壽命。
2.2.2 LIN 通信的實現(xiàn)
LIN 協(xié)議是一種開放的總線協(xié)議,一個完整的報文幀由報文頭和響應(yīng)組成。每一次數(shù)據(jù)的傳送都由主機節(jié)點開始,標(biāo)志著一次數(shù)據(jù)通信過程報文幀的開始[3].
圖5 為5 號單體磷酸鐵鋰電池LIN 總線標(biāo)識符場,以此為例說明LIN 總線標(biāo)識符場的設(shè)定。5 號單體電池ID 位為0101,所以此節(jié)單體電池的ID 為0x5,ID4、ID5 設(shè)為01,即設(shè)定發(fā)送的數(shù)據(jù)場字節(jié)為4 個字節(jié),通過前面的奇偶校驗得到奇偶校驗值為0、1,如圖5 所示。

由于各個信號的范圍不同,電壓、電流、溫度信號所用到的數(shù)據(jù)位數(shù)也不同,電壓的范圍在0~5 V 內(nèi),電流在0~20 A內(nèi),溫度在-40~125 ℃范圍內(nèi),所以本文在數(shù)據(jù)場中用第1個字節(jié)和第4 個字節(jié)的低兩位,共10 位來表示電壓;用第2個字節(jié)和第4 個字節(jié)的中間4 位,共12 位來表示電流;用第3 個字節(jié)和第4 個字節(jié)的高兩位,共10 位來表示溫度。由于電壓、電流、溫度都精確到小數(shù)點后,在數(shù)據(jù)場中表示小數(shù)比較復(fù)雜,本文用實際參數(shù)值的10 倍或100 倍在數(shù)據(jù)幀中表示,如圖6 所示。

表1 為各單體電池所對應(yīng)的LIN 總線節(jié)點的ID 資源分配表。

上層ECU作為LIN總線的主機節(jié)點,當(dāng)LIN主機節(jié)點向單體電池從機節(jié)點請求數(shù)據(jù)時,LIN 總線上將進行從機節(jié)點到主機節(jié)點的數(shù)據(jù)傳輸,此時LIN 主機節(jié)點向總線發(fā)送報文幀頭,總線上的LIN 從機節(jié)點接收報文幀頭后,判斷是否與自己的ID 匹配,若匹配發(fā)送報文幀響應(yīng),LIN 主機節(jié)點接收報文幀響應(yīng),完成主機節(jié)點的數(shù)據(jù)請求。
2.2.3 電池SOC 的估算和運行控制策略
在對SOC 進行估算時,一個準(zhǔn)確和合適的模型是非常需要的,對于Kalman 濾波算法來說精確的SOC 的估算是建立在精確的電池模型的基礎(chǔ)上。Thevenin 模型是目前來說比較準(zhǔn)確的模型,該模型對電池的外特性的描述采用電池電動勢、一個純電阻和一個容阻回路串聯(lián)的方法來實現(xiàn),其電氣模型的數(shù)學(xué)關(guān)系如下:

式(1)中k 為k 時刻,E(k)為電池端電壓,V(k)是電池電動勢,R1 是電池的歐姆內(nèi)阻,R2 是電池的極化內(nèi)阻,Uc 是電池的極化電壓,電容R2C 回路是用于模擬電池極化過程中的動態(tài)特性。考慮到溫度影響的情況下,電池的電動勢與荷電狀態(tài)有式(3)的關(guān)系:
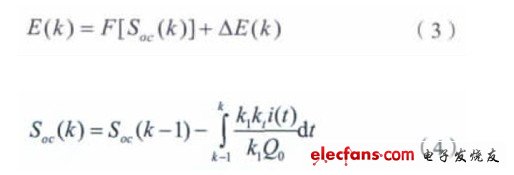
式中:F【Soc(k)】 是電池與電動勢的函數(shù)關(guān)系, Soc(k)表示電池在不同溫度下電動勢相對于參考條件下的變化量。通過以上公式,在進行離散化后得到狀態(tài)空間方程如下。

狀態(tài)空間方程準(zhǔn)確地給出了系統(tǒng)相關(guān)的系數(shù)矩陣A(K)、B(K)、C(K)、D(K)和常數(shù)矩陣W(K)、V(K),基于以上方程及相關(guān)矩陣,可以得到擴展Kalman 濾波估算算式。

擴展Kalman 濾波算法由濾波器計算和濾波器增益計算兩部分組成:濾波器計算由式(6)~(8)完成,在k 時刻,由式(7)利用(k-1)時刻的濾波結(jié)果得到SOC 的預(yù)測值,再根據(jù)狀態(tài)空間方程(6)得到在k 時刻的狀態(tài)變量預(yù)測值V(K),并與實際測量值比較后得到預(yù)測誤差,然后根據(jù)式(8)對狀態(tài)變量的預(yù)測值修正,得到新的濾波結(jié)果。濾波器增益計算由式(9)~(11)完成,式中Q和R 分別是噪聲W (k)和V (k)的方差陣。
3 實驗結(jié)果分析
本設(shè)計的底層ECU 的電路板如圖7 所示,每個單體電池上都會固定一塊底層ECU 的電路板。

在不同的充電策略下來檢驗電池管理系統(tǒng)的工作情況,通過檢測電池組中各個單體電池的充放電電壓、電流、溫度、SOC 等參數(shù),與實際值相比較來說明系統(tǒng)的檢測精度,如圖8所示,其中數(shù)據(jù)每分鐘記錄一次,橫坐標(biāo)為時間min.

本設(shè)計設(shè)定充放電時電壓上限為3.65 V,電壓下限為2.95 V.溫度報警為上限80 ℃。實驗對電池進行充電,最終充電電壓均在3.53~3.62 V,充電過程最大偏差50 mV,其中電池電壓誤差小于1%要求;此外,溫度測量誤差滿足1%要求,電流測量精度為1%,SOC 誤差在8%以內(nèi)。當(dāng)對單體電池實施人為過電壓時,系統(tǒng)能及時進行報警和顯示。通過實驗表明本電池管理系統(tǒng)能達到預(yù)期的電池參數(shù)檢測的目標(biāo),且都能滿足精度要求。
4 結(jié)論
本文設(shè)計開發(fā)了一種磷酸鐵鋰電池管理系統(tǒng),基于分布式方法檢測各個單體電池的參數(shù),引入了LIN 總線技術(shù),進一步降低了系統(tǒng)的成本。本系統(tǒng)實現(xiàn)了電池實時監(jiān)測與保護、SOC 估算、LIN 總線通信等功能。該系統(tǒng)結(jié)構(gòu)簡單、測量精度較高、能有效地保護電池組,用LIN 總線代替常用的CAN 或RS232 通信,為設(shè)計新型電動汽車電池管理系統(tǒng)提供了重要依據(jù)。