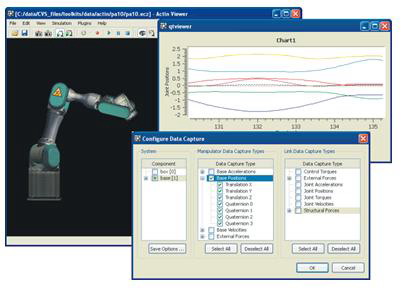
1. 機(jī)器人控制與仿真的軟件Actin
Energid的Actin的軟件工具可以讓你模擬和控制任何機(jī)器人系統(tǒng)。Actin是為根據(jù)美國宇航局開發(fā)的專利軟件。 Actin協(xié)調(diào)一個(gè)或多個(gè)機(jī)器人的運(yùn)動(dòng)。開發(fā)人員只需要通過一種簡單的語言提供機(jī)器手所需的運(yùn)動(dòng)。Actin則產(chǎn)生實(shí)時(shí)的算法,控制電機(jī)位置和速度。Actin可用于控制任何關(guān)節(jié)或機(jī)械手的類型,任何數(shù)目的自由度和分支。使機(jī)器人運(yùn)動(dòng)流暢,避免碰撞和關(guān)節(jié)限值,優(yōu)化力量等。
Actin使用內(nèi)置的控制軟件或用戶自己開發(fā)的控制軟件可以提供強(qiáng)大的模擬功能。Actin輸入可為CAD格式和SolidWorks的格式。可以捕獲CAD模型的物理性質(zhì)用于高保真的物理特性分析。通過豐富的建模和分析技術(shù),Actin將問題解決在最初階段從而節(jié)省時(shí)間和精力。Actin還可以評(píng)估一個(gè)機(jī)器人解決新的問題或應(yīng)用于新的環(huán)境中的能力。
使用Actin,用戶可以通過提供的庫編譯自己編寫的源代碼。使用Actin的可執(zhí)行文件,或直接通過網(wǎng)絡(luò)通信接口的可執(zhí)行文件。這一切都很容易,Energid工程師會(huì)支持用戶的工作。
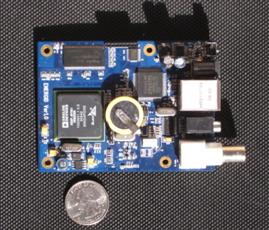
2. 機(jī)器人遙控軟件,編解碼器SMARTCODEC
在一塊比紙牌小的板上,通過IP網(wǎng)絡(luò)(如局域網(wǎng)或公共互聯(lián)網(wǎng)),Energid的SmartCODEC捕獲和極端地壓縮視頻的傳輸。它可為移動(dòng)監(jiān)控,工業(yè)機(jī)器人,民用機(jī)器人的應(yīng)用提供可靠的遠(yuǎn)程機(jī)器人通信。
使用商業(yè)互聯(lián)網(wǎng)和移動(dòng)通信時(shí),即使有網(wǎng)絡(luò)帶寬的限制和延遲,SmartCODEC仍能夠自動(dòng)適應(yīng)突然的變化。它可以在60ms內(nèi)調(diào)節(jié)比特率量,同時(shí)保持流暢的視頻。通過閉環(huán)優(yōu)化可以優(yōu)先關(guān)鍵數(shù)據(jù)以響應(yīng)用戶接收端的優(yōu)先事項(xiàng),并補(bǔ)償網(wǎng)絡(luò)時(shí)延抖動(dòng)。編碼器的硬件可以和軟件或硬件解碼一起 使用。
SmartCODEC優(yōu)勢(shì)
•用于惡劣的戰(zhàn)場(chǎng)通信環(huán)境的設(shè)計(jì)
•快速適應(yīng)不同的網(wǎng)絡(luò)帶寬
•感知一致視頻
•降低時(shí)延抖動(dòng)
•基于H.264的核
•用于無線或有線網(wǎng)絡(luò)
•解碼器可作為單獨(dú)的GUI或嵌入OCU
輸入/輸出
•視頻分辨率:最高可達(dá)720x480,每秒30幀
•視頻輸入:NTSC
•音頻輸入:模擬
•以太網(wǎng)接口:RJ45
•電源:12V
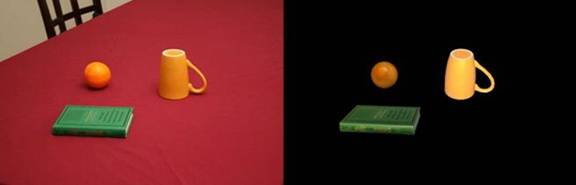
3. 物體識(shí)別與跟蹤,機(jī)械視覺, SelectinTM
Selectin是Energid的C + +的機(jī)器視覺工具軟件。該工具包中提供了一個(gè)易于使用的前所未有的三維物體識(shí)別和跟蹤技術(shù)。有了Selectin,開發(fā)人員可以用詳細(xì)的CAD模型,對(duì)識(shí)別算法進(jìn)行訓(xùn)練來構(gòu)建物體識(shí)別系統(tǒng)。Selectin可以區(qū)分場(chǎng)景中的物體的類型,決定的姿勢(shì)(即位置和方向)。它甚至可以跟蹤有關(guān)節(jié)的物體,比如跟蹤一把剪刀的刀片。
Selectin的基于C + +的物體識(shí)別與機(jī)器視覺的方法是靈活的,可擴(kuò)展的。可以應(yīng)用到許多不同類型的影像傳感器,包括灰度,彩色,高光譜和激光雷達(dá)傳感器。Selectin的方法的核心是在算法中能夠權(quán)衡每步運(yùn)行時(shí)間和精度。
SelectinC++面向?qū)ο蟮脑O(shè)計(jì),包括空間分析組件和時(shí)間組件。空間組件用于分析每個(gè)單獨(dú)的傳感器的數(shù)據(jù),時(shí)間組件與空間組件相結(jié)合,能夠隨時(shí)分析捕捉的數(shù)據(jù)集。物體識(shí)別技術(shù)使用物體的XML的CAD模型進(jìn)行自動(dòng)識(shí)別建立適合的算法。
•三維識(shí)別與跟蹤——根據(jù)目標(biāo)的CAD模型,跟蹤目標(biāo)的位置,方向和關(guān)節(jié)。
•速度—— 快速跟蹤的實(shí)現(xiàn)是通過使用功能強(qiáng)大,低成本的PC圖形卡進(jìn)行信號(hào)處理。
•靈活性 ——使用基于XML的腳本語言。支持彩色,灰度,和激光雷達(dá)。
•代碼重用—— 對(duì)于一個(gè)應(yīng)用開發(fā)的程序算法可用于其他方面的應(yīng)用。
應(yīng)用
Selectin已被美國軍隊(duì)?wèi)?yīng)用到手術(shù)工具的跟蹤,被美國宇航局的用于機(jī)械視覺。該工具包的強(qiáng)大功能和靈活性,使得它有廣泛的應(yīng)用,包括以下:
物體識(shí)別——由物體的CAD模型能夠識(shí)別到物體,使Selectin特別適合于某些類別的物體識(shí)別問題。復(fù)雜的結(jié)構(gòu),如衛(wèi)星,汽車,飛機(jī),都是可用Selectin識(shí)別的物體的例子。
視覺檢測(cè)系統(tǒng)——歷史上,檢查系統(tǒng)大多數(shù)采用一維或二維傳感器,但自動(dòng)化技術(shù)和新制造工藝的最新進(jìn)展,增加了對(duì)3D檢測(cè)系統(tǒng)的需要。Selectin填補(bǔ)了這一實(shí)時(shí)應(yīng)用要求的空白。
監(jiān)控——Selectin可以用于監(jiān)控特定物體相對(duì)其環(huán)境的改變。可用于國土安全或地方的區(qū)域監(jiān)測(cè)。
視覺伺服——當(dāng)結(jié)合Energid的Actin機(jī)器人控制工具包,Selecin可用于圖像引導(dǎo)機(jī)器人控制。在環(huán)境中跟蹤和識(shí)別物體并交互地操縱這些物體。此外,Selectin可以跟蹤的機(jī)械手的位置。通過結(jié)合編碼器跟蹤的位置,機(jī)器人的操作能夠達(dá)到更高的精度和魯棒性。
