
1 引言
目前,各種圖像設(shè)備已廣泛應(yīng)用到航空航天、軍事、醫(yī)療等領(lǐng)域。圖像信號源作為地面圖像采集裝置測試系統(tǒng)中的一部分,其傳輸方式及信號精度都是影響系統(tǒng)性能的重要因素。由于圖像信號的傳輸速率高,數(shù)據(jù)量大,在傳輸過程中,其精度和傳輸距離易受影響。為了提高信號傳輸距離和精度設(shè)計了由FPGA內(nèi)部發(fā)出圖像數(shù)據(jù),并通過FPGA進(jìn)行整體時序控制;輸出接口信號轉(zhuǎn)換成符合Camera Link標(biāo)準(zhǔn)的低電壓差分信號(LVDS)進(jìn)行傳輸。該圖像信號源已成功應(yīng)用于某彈載記錄器的地面測試臺系統(tǒng)中。
2 Camera Link接口及圖像數(shù)據(jù)接口信號
Camera Link標(biāo)準(zhǔn)是由國家半導(dǎo)體實驗室(National Semiconductor)提出的一種Channel Link技術(shù)標(biāo)準(zhǔn)發(fā)展而來的,該接口具有開放式的接口協(xié)議,使得不同廠家既能保持產(chǎn)品的差異性,又能互相兼容。它在傳統(tǒng)LVDS傳輸數(shù)據(jù)的基礎(chǔ)上又加載了并轉(zhuǎn)串發(fā)送器和串轉(zhuǎn)并接收器,可在并行組合的單向鏈路、串行鏈路和點對點鏈路上,利用SER/DES(串行化/解串行化)技術(shù)以高達(dá)4.8 Gb/s的速度發(fā)送數(shù)據(jù)。CameraLink標(biāo)準(zhǔn)使用每條鏈路需兩根導(dǎo)線的LVDS傳輸技術(shù)。驅(qū)動器接收28個單端數(shù)據(jù)信號和1個時鐘信號,這些信號以7:1的比例被串行發(fā)送,也就是5對LVDS信號通道上分別傳輸4組LVDS數(shù)據(jù)流和1組LVDS時鐘信號,即完成28位數(shù)據(jù)的同步傳輸只需5對線,而且在多通道66 MHz像素時鐘頻率下傳輸距離可達(dá)6 m。
Camera Link是在Channel Link的基礎(chǔ)上增加了一些相機控制信號和串行通信信號,定義出標(biāo)準(zhǔn)的接頭也就是標(biāo)準(zhǔn)化信號線,讓Camera及影像卡的信號傳輸更簡單化,同時提供基本架構(gòu)(Base Configuration)、中階架構(gòu)(Medium Configuration)及完整架構(gòu)(Full Configuration)三種:基本架構(gòu)屬單一Camera Link元件,為單一接頭;中階架構(gòu)屬雙組Camera Link元件,為雙組接頭;完整架構(gòu)屬三組Camera Link元件,為三組接頭。
傳輸數(shù)據(jù)時使用的視頻同步信號固定不變,分別為:幀同步信號FVAL:當(dāng)FVAL為高電平時,正輸出一幀有效數(shù)據(jù);行同步信號LVAL:當(dāng)LVAL為高電平時,正輸出一個有效像元行(在兩個有效像元行中間,LVAL會跳過幾個無效的像素點,可在實際應(yīng)用時設(shè)定跳過的像素點數(shù));數(shù)據(jù)有效信號DVAL:當(dāng)FVAL和LVAL為高時,DVAL為高電平,正輸出有效的數(shù)據(jù);SPARE為備用信號。
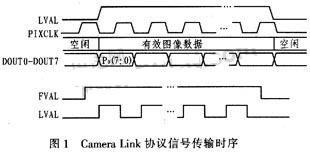
設(shè)計中使用了FVAL和LVAL信號,當(dāng)FVAL和LVAL信號都為高電平時,圖像信號源數(shù)據(jù)在像素時鐘信號PIXCLK的控制下依次發(fā)送。其接口信號時序如圖1所示。
3圖像信號源的設(shè)計實現(xiàn)
3.1設(shè)計方案
檢測圖像數(shù)據(jù)記錄裝置性能、圖像信號源的標(biāo)準(zhǔn)圖像生成有兩種方法。一種是用FPGA直接生成信號,輸出圖像為0~255的灰度值圖像;另一種是通過上位機軟件下載圖像到信號源中,F(xiàn)PGA產(chǎn)生視頻同步信號和進(jìn)行整體邏輯控制。
設(shè)計中采用了FPGA與Camera Link接口器件DS90CR-285相結(jié)合的方案,其圖像信號源數(shù)據(jù)、像素時鐘信號及視頻同步信號由FPGA內(nèi)部模塊產(chǎn)生,經(jīng)過DS90CR285器件轉(zhuǎn)換成LVDS信號,接收端使用配套器件DS90CR286進(jìn)行解調(diào)。考慮到FPGA的現(xiàn)場可編程特性,使用靈活方便,能夠降低硬件電路設(shè)計難度。
所以,該方案選擇FPGA作為主模塊。Camera Link接口器件DS90CR285是專用電平轉(zhuǎn)換器件,能將28位CMOS/TTL電平數(shù)據(jù)和一位像素時鐘信號分別轉(zhuǎn)換成4組LVDS數(shù)據(jù)流及一對LVDS時鐘信號進(jìn)行傳輸,由于采用差分傳輸方式,提高了傳輸距離及信號精度。
3.2硬件結(jié)構(gòu)
圖2給出圖像信號源的硬件結(jié)構(gòu)框圖,主要由圖像信號源和外圍電路組成。前者是設(shè)計的核心,它選用Xilinx公司的Spartan-Ⅱ系列FPGAXC2S50,用以設(shè)計系統(tǒng)時序、圖像數(shù)據(jù)及產(chǎn)生相應(yīng)的信號;后者主要包括晶體振蕩器、電平轉(zhuǎn)換器件DS90CR285及輸入輸出接口。
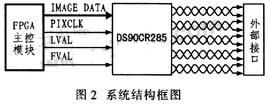
系統(tǒng)上電后,晶體振蕩器輸出時鐘信號,F(xiàn)PGA內(nèi)部主控模塊將自動產(chǎn)生與Camera Link協(xié)議相匹配的信號傳輸時序。FPGA內(nèi)部產(chǎn)生的像素時鐘信號、幀同步信號、行同步信號和圖像數(shù)據(jù)一起進(jìn)入DS90CR285,并通過該電平轉(zhuǎn)換器件轉(zhuǎn)換成LVDS信號,每對LVDS信號之間采用雙絞線傳輸,以消除耦合干擾。圖2中曲線部分即為Camera Link接口。
3.3 FPGA程序設(shè)計
設(shè)計中采用VHDL硬件描述語言進(jìn)行時序設(shè)計。系統(tǒng)時鐘為125 MHz,信號源像素時鐘信號PIXCLK為系統(tǒng)時鐘6分頻,即21 MHz。本圖像信號源數(shù)據(jù)格式為640×480,幀頻為53 Hz,即每秒傳輸53幀圖像。行同步信號LVAL和幀同步信號FVAL均由像索時鐘信號進(jìn)行計數(shù)產(chǎn)生,其時序如圖3所示。

其中P1為71個PIXCLK時鐘周期:A為640個PIXCLK;即一行包含640個像素點;Q為94個PIXCLK;P2為23個PIXCLK,幀同步信號FVAL為低電平的時間是38 074個PIXCLK。一幀圖像包含480行有效數(shù)據(jù),可計算出傳輸一幀圖像信號的時間為480×(A+Q)+38 074=390 394個PIXCLK時鐘周期,幀頻為21 MHz÷390 394=53 Hz,滿足設(shè)計要求。
產(chǎn)生行同步信號、幀同步信號和圖像數(shù)據(jù)部分程序代碼如下:

上述代碼中,lval為行同步信號;fval為幀同步信號;U12_data為圖像數(shù)據(jù)。
3.4實驗結(jié)果
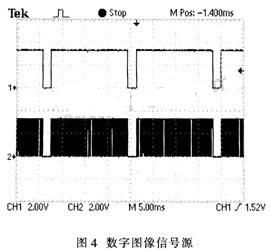
將程序下載到FPGA進(jìn)行實現(xiàn)。圖4給出該圖像信號源產(chǎn)生的視頻同步信號,即幀同步電壓信號Ufval和同步電壓信號Ulval。由圖4中可見,符合設(shè)計時序的要求。
4結(jié)語
根據(jù)提供的方案,使用FPGA設(shè)計的圖像信號源結(jié)構(gòu)簡單,實現(xiàn)方便,而且具有很強的可擴展性。基于Camera Link接口協(xié)議的圖像信號采用LVDS方式傳輸,增加了傳輸距離,提高了傳輸過程中的信號精度。在地面測試臺系統(tǒng)的應(yīng)用中,該圖像信號源運行穩(wěn)定、可靠,各項指標(biāo)均能滿足各項設(shè)計要求。