
本文采用PLC和變頻器實(shí)現(xiàn)電梯常規(guī)控制的基礎(chǔ)上,利用旋轉(zhuǎn)編碼器發(fā)出的脈沖信號(hào)構(gòu)成位置反饋,實(shí)現(xiàn)電梯的精確位移控制。通過PLC程序設(shè)計(jì)實(shí)現(xiàn)樓層計(jì)數(shù)、換速信號(hào)、門區(qū)和平層信號(hào)的數(shù)字控制,取代井道位置檢測(cè)裝置,提高了系統(tǒng)的可靠性和平層精度。
1 引言
隨著城市建設(shè)的不斷發(fā)展,高層建筑不斷增多,電梯作為高層建筑中垂直運(yùn)行的交通工具已與人們的日常生活密不可分。目前電梯的控制普遍采用了兩種方式,一是采用微機(jī)作為信號(hào)控制單元,完成電梯信號(hào)的采集、運(yùn)行狀態(tài)和功能的設(shè)定,實(shí)現(xiàn)電梯的自動(dòng)調(diào)度和集選運(yùn)行功能,拖動(dòng)控制則由變頻器來完成;第二種控制方式用可編程控制器(PLC)取代微機(jī)實(shí)現(xiàn)信號(hào)集選控制。從控制方式和性能上來說,這兩種方法并沒有太大的區(qū)別。國內(nèi)廠家大多選擇第二種方式,其原因在于生產(chǎn)規(guī)模較小,自己設(shè)計(jì)和制造微機(jī)控制裝置成本較高;而PLC可靠性高,程序設(shè)計(jì)方便靈活。本設(shè)計(jì)在用PLC控制變頻調(diào)速實(shí)現(xiàn)電流、速度雙閉環(huán)的基礎(chǔ)上,在不增加硬件設(shè)備的條件下,實(shí)現(xiàn)電流、速度、位移三環(huán)控制。
2 硬件電路

系統(tǒng)硬件結(jié)構(gòu)圖如圖1 所示,其各部分功能說明如下。
Q1——三相電源斷路圖
K1——電源控制接觸器
K2——負(fù)載電機(jī)通斷控制接觸器
VS——變頻器
BU——制動(dòng)單元
RB——能耗制動(dòng)電阻
M——主拖動(dòng)曳引電機(jī)
2.1 主電路
主電路由三相交流輸入、變頻驅(qū)動(dòng)、曳引機(jī)和制動(dòng)單元幾部分組成。由于采用交-直-交電壓型變頻器,在電梯位勢(shì)負(fù)載作用下,制動(dòng)時(shí)回饋的能量不能饋送回電網(wǎng),為限制泵升電壓,采用受控能耗制動(dòng)方式。
2.2 PLC控制電路
選用OMRON公司C系列60P型PLC。PLC接收來自操縱盤和每層呼梯盒的召喚信號(hào)、轎廂和門系統(tǒng)的功能信號(hào)以及井道和變頻器的狀態(tài)信號(hào),經(jīng)程序判斷與運(yùn)算實(shí)現(xiàn)電梯的集選控制。PLC在輸出顯示和監(jiān)控信號(hào)的同時(shí),向變頻器發(fā)出運(yùn)行方向、啟動(dòng)、加/減速運(yùn)行和制動(dòng)停梯等信號(hào)。
2.3 電流、速度雙閉環(huán)電路
采用YASAKWA公司的VS-616G5 CIMRG5A 4022變頻器。變頻器本身設(shè)有電流檢測(cè)裝置,由此構(gòu)成電流閉環(huán);通過和電機(jī)同軸聯(lián)接的旋轉(zhuǎn)編碼器,產(chǎn)生a、b兩相脈沖進(jìn)入變頻器,在確認(rèn)方向的同時(shí),利用脈沖計(jì)數(shù)構(gòu)成速度閉環(huán)。
2.4 位移控制電路
電梯作為一種載人工具,在位勢(shì)負(fù)載狀態(tài)下,除要求安全可靠外,還要求運(yùn)行平穩(wěn),乘坐舒適,停靠準(zhǔn)確。采用變頻調(diào)速雙環(huán)控制可基本滿足要求,但和國外高性能電梯相比還需進(jìn)一步改進(jìn)。本設(shè)計(jì)正是基于這一想法,利用現(xiàn)有旋轉(zhuǎn)編碼器構(gòu)成速度環(huán)的同時(shí),通過變頻器的PG卡輸出與電機(jī)速度及電梯位移成比例的脈沖數(shù),將其引入PLC的高速計(jì)數(shù)輸入端口0000,通過累計(jì)脈沖數(shù),經(jīng)世式(1)計(jì)算出脈沖當(dāng)量,由此確定電梯位置。電梯位移
h=SI
式中 I——累計(jì)脈沖數(shù)
S——脈沖當(dāng)量
S = lpD / (pr) (1)
本系統(tǒng)采用的減速機(jī),其減速比l = 1/32,曳引輪直徑D = 580mm,電機(jī)額定轉(zhuǎn)速ned = 1450r/min,旋轉(zhuǎn)編碼器每轉(zhuǎn)對(duì)應(yīng)的脈沖數(shù)p = 1024,PG卡分頻比r = 1/18,代入式(1)得
S = 1.0mm / 脈沖
3 程序設(shè)計(jì)
利用變頻器PG卡輸出端(TA2.1)將脈沖信號(hào)引入PLC的高速計(jì)數(shù)輸入端0000,構(gòu)成位置反饋。高速計(jì)數(shù)器(CNT47)累加的脈沖數(shù)反映電梯的位置。高速計(jì)數(shù)器的值不斷地與各信號(hào)點(diǎn)對(duì)應(yīng)的脈沖數(shù)進(jìn)行比較,由此判斷電梯的運(yùn)行距離、換速點(diǎn)、平層電和制動(dòng)停車點(diǎn)等信號(hào)。理論上這種控制方式其平層誤差可在±1個(gè)脈沖當(dāng)量范圍。在考慮減速機(jī)齒輪嚙合間隙等機(jī)械因素情況下,電梯的平層精度可達(dá)±5mm內(nèi),大大低于國標(biāo)±15mm的標(biāo)準(zhǔn),滿足電梯起制動(dòng)平滑,運(yùn)行平穩(wěn),平層準(zhǔn)確的要求。電梯在運(yùn)行過程中,通過位置信號(hào)檢測(cè),軟件實(shí)時(shí)計(jì)算以下位置信號(hào):電梯所在樓層位置、快速換速點(diǎn)、中速換速點(diǎn)、門區(qū)信號(hào)和平層位置信號(hào)等。由此省去原來每層在井道中設(shè)置的上述信號(hào)檢測(cè)裝置,大大減少井道檢測(cè)元件和信號(hào)連線,降低成本。下面針對(duì)在實(shí)現(xiàn)集選控制基礎(chǔ)上新增添的樓層計(jì)數(shù)、快速換速、中速換速、門區(qū)和平層信號(hào)5個(gè)子程序進(jìn)行介紹。
3.1 樓層計(jì)數(shù)
本設(shè)計(jì)采用相對(duì)計(jì)數(shù)方式。運(yùn)行前通過自學(xué)習(xí)方式,測(cè)出相應(yīng)樓層高度脈沖數(shù),對(duì)應(yīng)17層電梯分別存入16個(gè)內(nèi)存單元DM06 ~ DM21。
樓層計(jì)數(shù)器(CNT46)為一雙向計(jì)數(shù)器,當(dāng)?shù)竭_(dá)各層的樓層計(jì)數(shù)點(diǎn)時(shí),根據(jù)運(yùn)行方向進(jìn)行加1或減1計(jì)數(shù)。樓層計(jì)數(shù)程序流程圖如圖2 所示。
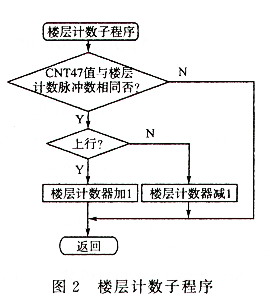
運(yùn)行中,高速計(jì)數(shù)器累計(jì)值實(shí)時(shí)與樓層計(jì)數(shù)點(diǎn)對(duì)應(yīng)的脈沖數(shù)進(jìn)行比較,相等時(shí)發(fā)出樓層計(jì)數(shù)信號(hào),上行加1,下行減1。為防止計(jì)數(shù)器在計(jì)數(shù)脈沖高電平期間重復(fù)計(jì)數(shù),采用樓層計(jì)數(shù)信號(hào)上沿觸發(fā)樓層計(jì)數(shù)器。
3.2 快速換速
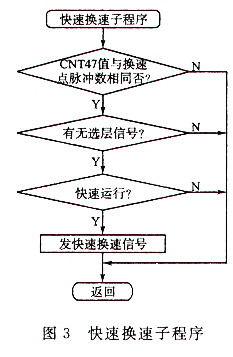
當(dāng)高速計(jì)數(shù)器值與快速換速點(diǎn)對(duì)應(yīng)的脈沖數(shù)相等時(shí),若電梯處于快速運(yùn)行且本層有選層信號(hào),發(fā)快速換速信號(hào)。若電梯中速運(yùn)行或雖快速運(yùn)行但本層無選層信號(hào),則不發(fā)換速信號(hào)。程序流程圖如圖3所示。中速換速與快速換速判斷方法類似,不再重復(fù)。
3.3 門區(qū)信號(hào)
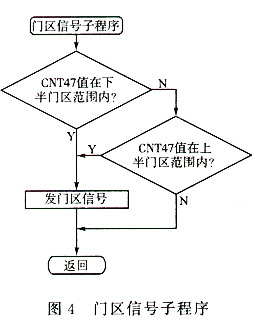
當(dāng)高速計(jì)數(shù)器CNT47數(shù)值在門區(qū)所對(duì)應(yīng)脈沖數(shù)范圍內(nèi)時(shí),發(fā)門區(qū)信號(hào)。程序流程圖如圖4所示。平層信號(hào)與區(qū)信號(hào)判斷方法類似,不再重復(fù)。
3.4 脈沖信號(hào)故障檢測(cè)
脈沖信號(hào)的準(zhǔn)確采集和傳輸在本系統(tǒng)中顯得尤為重要,為檢測(cè)旋轉(zhuǎn)編碼器和脈沖傳輸電路故障,設(shè)計(jì)了有無脈沖信號(hào)和錯(cuò)漏脈沖檢測(cè)電路,通過實(shí)時(shí)檢測(cè)確保系統(tǒng)正常運(yùn)行。為消除脈沖計(jì)數(shù)累計(jì)誤差,在基站設(shè)置復(fù)位開關(guān),接入PLC高速計(jì)數(shù)器CNT47的復(fù)位端0001。
3.5 快速換速工作原理
限于篇幅,本文僅對(duì)快速換速工作原理進(jìn)行介紹,梯形圖如圖5所示。
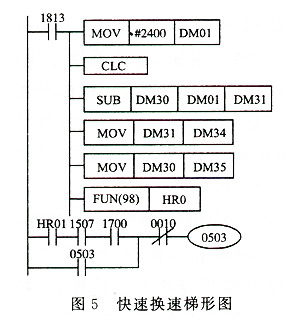
圖中數(shù)據(jù)存儲(chǔ)單元DM01為快速換速距離脈沖數(shù),DM30為樓層間距脈沖數(shù),DM31為快速換速點(diǎn)對(duì)應(yīng)的脈沖數(shù),DM34為高速換速比較區(qū)間下限,DM35為高速換速比較區(qū)間上限,HR01為快速換速點(diǎn)開始信號(hào),1507為快速運(yùn)行信號(hào),1700為選層信號(hào),0010為零速信號(hào),0503為快速換速輸出信號(hào)。
以上行為例,DM31快速換速點(diǎn)對(duì)應(yīng)的脈沖數(shù)是樓層間距DM30與快速換速舉例DM01之差;DM31和DM30的值分別賦給DM34和 DM35。運(yùn)行時(shí)高速計(jì)數(shù)器不斷累加脈沖數(shù),每個(gè)掃描周期計(jì)數(shù)器的值與DM34~ DM35區(qū)段進(jìn)行比較。當(dāng)其值進(jìn)入DM34與DM35區(qū)段時(shí),HR01 置位,表示進(jìn)入快速換速區(qū)間;若此時(shí)有選層信號(hào)且電梯為快速運(yùn)行,則發(fā)快速換速信號(hào)(0503置ON)。
4 結(jié)論
本文所述系統(tǒng)基于電氣集選控制原則,采用脈沖計(jì)數(shù)方法,用脈沖編碼器取代井道中原有的位置檢測(cè)裝置,實(shí)現(xiàn)位移控制,用軟件代替部分硬件功能,既降低系統(tǒng)成本,又提高了系統(tǒng)的可靠性和安全性,實(shí)現(xiàn)電梯的全數(shù)字化控制。
在實(shí)驗(yàn)室調(diào)試的基礎(chǔ)上,采用上述方法,實(shí)地對(duì)兩臺(tái)17層電梯進(jìn)行改造,經(jīng)有關(guān)部門檢測(cè)和近一年的實(shí)際運(yùn)行表明,系統(tǒng)運(yùn)行可靠,乘坐舒適,故障率大為降低,平層精度在±5mm以內(nèi),取得了良好的運(yùn)行效果。