
1 引 言
本文從實(shí)時(shí)性和大容量兩方面介紹了在某型導(dǎo)彈景象匹配制導(dǎo)系統(tǒng)中通用計(jì)算機(jī)上加入DSP加速卡實(shí)現(xiàn)的圖像采集系統(tǒng)。利用DSP芯片的高速處理特性完成大部分的圖像處理工作,上位機(jī)只完成輔助操作和存儲(chǔ)系統(tǒng)。這種方法發(fā)揮了DSP的高速性能又具有相當(dāng)大的靈活性,而且開發(fā)工具比較完善。導(dǎo)彈景象匹配制導(dǎo)系統(tǒng)在傳輸實(shí)時(shí)景物圖像時(shí)要求足夠的傳輸速度,PCI總線速度最高可達(dá)528MB/S(66MHz、64位)。這是其他總線無法比擬的速度,如ISA總線速度只有5MB/S。另外,該系統(tǒng)中DSP的可擴(kuò)展存儲(chǔ)空間高達(dá)1GB。這完全可以滿足導(dǎo)彈景象匹配制導(dǎo)系統(tǒng)中圖像處理的需要。
2 基于PCI總線的DSP圖像采集系統(tǒng)
本系統(tǒng)主要用于敏感導(dǎo)彈飛行航線下面或目標(biāo)地區(qū)的實(shí)時(shí)景物圖像,系統(tǒng)拍下敏感到的圖像數(shù)據(jù)并傳送到DSP進(jìn)行處理,然后經(jīng)PCI總線把處理后的數(shù)據(jù)上傳到上位機(jī),與預(yù)存在相關(guān)器中的基準(zhǔn)景物圖像比較,以獲取誤差信號(hào),形成導(dǎo)引指令,控制導(dǎo)彈飛向目標(biāo)。當(dāng)然這套系統(tǒng)也可用于其他的視頻會(huì)議、視頻點(diǎn)播以及監(jiān)控系統(tǒng),如大型超市監(jiān)控、寫字樓監(jiān)控等,其硬件系統(tǒng)基本一致,只是軟件功能有所區(qū)別。
系統(tǒng)采用了TI公司C6000系列DSP中的TMS320C6211[1] [2]作為系統(tǒng)的CPU。圖像數(shù)據(jù)通過光學(xué)成像或微波成像裝置采集并輸出模擬圖像信號(hào)。這些信號(hào)經(jīng)視頻解碼芯片轉(zhuǎn)換為數(shù)字信號(hào);再經(jīng)FIFO輸入DSP進(jìn)行圖像的增強(qiáng)、分割、特征提取和數(shù)據(jù)壓縮等;然后輸出信號(hào)經(jīng)PCI解碼芯片轉(zhuǎn)換為符合PCI總線規(guī)范的標(biāo)準(zhǔn)信號(hào),通過PCI總線接口傳到上位機(jī)。系統(tǒng)的控制邏輯由EPLD(Erasable Programmable Logic Device)控制器實(shí)現(xiàn)。系統(tǒng)結(jié)構(gòu)圖如圖1所示:

(1)視頻解碼芯片
系統(tǒng)中采集的圖像信號(hào)采用Philips公司的SAA7111A[3]完成A/D轉(zhuǎn)換。SAA7111A允許四路模擬視頻輸入,具有兩個(gè)模擬處理通道,支持四路CVBS模擬信號(hào)或二路Y/C模擬信號(hào)或二路CVBS信號(hào)和一路Y/C信號(hào)。SAA7111A對(duì)攝像頭輸入的標(biāo)準(zhǔn)PAL格式的模擬圖像信號(hào)進(jìn)行A/D轉(zhuǎn)換,然后輸出符合CCIR601格式的4:2:2的16位YUV數(shù)據(jù)到FIFO。其中亮度信號(hào)Y為8位、色度信號(hào)Cr和Cb合為8位數(shù)據(jù)。FIFO采用IDT公司的IDT72V215LB芯片,F(xiàn)IFO的深度為512×18bit,支持STANDARD(標(biāo)準(zhǔn))和FWFT(First Word Fall-Through,首字直接通過)兩種工作模式。按照CCIR601[4]格式,YUV圖像分辨率為720×576象素,當(dāng)按行輸出時(shí),SAA7111A輸出數(shù)據(jù)流大小為:720×16=1440bit。因?yàn)镈SP通過32位的SBSRAM接口與FIFO通信,故YUV數(shù)據(jù)寫入FIFO時(shí)需要在FIFO之間實(shí)現(xiàn)乒乓切換。這時(shí)一行720×16bit的數(shù)據(jù)在兩片F(xiàn)IFO中存儲(chǔ)變?yōu)?60×32bit。兩片F(xiàn)IFO可以滿足上述要求。FIFO的初始化及時(shí)序由
EPLD實(shí)現(xiàn)。
(2)DSP圖像處理模塊
TMS320C6211是TI公司發(fā)布的面向視頻處理領(lǐng)域的新款高速數(shù)字處理芯片,適用于移動(dòng)通信基站、圖像監(jiān)控、雷達(dá)系統(tǒng)等對(duì)速度要求高和高度智能化的應(yīng)用領(lǐng)域。存儲(chǔ)空間分兩部分:
運(yùn)行過程的臨時(shí)數(shù)據(jù)存在Winbond公司的兩片128Mbit的W981216BH[5]中;系統(tǒng)程序則固化在FLASH存儲(chǔ)器中,該存儲(chǔ)器選用AMD公司生產(chǎn)的8Mbit的AM29LV800B。Flash存儲(chǔ)器具有在線重寫入功能。這對(duì)系統(tǒng)啟動(dòng)程序的修改和升級(jí)都帶來了很大的方便。基于TMS320C6211的圖像處理系統(tǒng)框圖如圖2所示:

TMS320C6211 DSP的高速性能主要體現(xiàn)在以下方面:
①TMS320C6211的存儲(chǔ)空間最大可擴(kuò)展到1GB,完全可以滿足各種圖像處理系統(tǒng)所需的內(nèi)存空間,而且其最高時(shí)鐘可達(dá)200MHz,峰值性能可達(dá)1600MIPS(百萬條指令/秒)、2400MOPS(百萬次操作/秒)。
②并行處理結(jié)構(gòu)。TMS320C6211芯片內(nèi)有8個(gè)并行處理單元,分為相同的兩組,并行結(jié)構(gòu)大大提高芯片的性能。
③芯片體系采用VelociTI結(jié)構(gòu)。VelociTI是一種高性能的甚長指令字(VLIW)結(jié)構(gòu),單指令字字長為32bit,8個(gè)指令組成一個(gè)指令包,總字長為256bit。即每秒鐘可以執(zhí)行8條指令。VelociTI結(jié)構(gòu)大大提高了DSP芯片的性能。
④采用流水線操作實(shí)現(xiàn)高速度、高效率。TMS320C6211只有在流水線充分發(fā)揮作用的情況下,才能達(dá)到最高的峰值性能。與其他系列DSP相比,優(yōu)勢在于簡化了流水線的控制以消除流水線互鎖,并增加流水線的深度來消除傳統(tǒng)流水線的取指、數(shù)據(jù)訪問和乘法操作上的瓶頸。
本系統(tǒng)DSP主要完成從FIFO讀出數(shù)據(jù)的處理以及壓縮等。數(shù)據(jù)處理由自行編寫的算法實(shí)現(xiàn),數(shù)據(jù)壓縮算法采用JPEG(Joint Photographic Expert Group)標(biāo)準(zhǔn)。當(dāng)光學(xué)成像或微波成像裝置采集速度為每秒25幀圖像時(shí),它留給DSP處理的時(shí)間最多為每幀40ms。如果考慮系統(tǒng)有一定的延時(shí)以及處理后圖像的存儲(chǔ)時(shí)間,那么DSP處理一幅圖像時(shí)間不能超過30ms。按照C6211的處理速度,在30ms內(nèi)可以處理48M(0.03×1600MIPS)條指令。DSP讀出FIFO中的行數(shù)據(jù)并存入SDRAM,一幀圖像有576行,在最后一行時(shí)會(huì)收到系統(tǒng)的幀中斷,這時(shí)SDRAM中的圖像數(shù)據(jù)總共有1440×576=810KB。讓C6211用36M條指令周期的時(shí)間處理810KB的數(shù)據(jù)顯然綽綽有余。粗略的計(jì)算過程如下:
系統(tǒng)采用快速DCT(離散余弦變換),每8×8矩陣需要11次乘法、29次加法,因此一幀圖像的FDCT,共需要(11+29)×720×576×2/64=518400個(gè)指令周期;對(duì)于量化模塊,每8×8矩陣需要64個(gè)量化指令周期,一幀需要64×720×576×2/64=829440個(gè)指令周期;對(duì)于編碼部分,假設(shè)編碼后非0元素占25%,對(duì)每8×8矩陣進(jìn)行Zig-Zag掃描、編碼估計(jì)需要120個(gè)指令周期,則共需120×720×576×2/64=1555200個(gè)指令周期。按以上計(jì)算,在系統(tǒng)中進(jìn)行JPEG編碼大約需要2903040個(gè)指令周期,耗時(shí)19.3536ms(TMS320C6211工作在150MHz時(shí))。可以看出,實(shí)際需要的指令遠(yuǎn)小于36M條,而時(shí)間也遠(yuǎn)小于30ms,DSP完全可以實(shí)時(shí)處理從FIFO傳過來的數(shù)據(jù)。
(3)PCI總線模塊
PCI總線規(guī)范吸引人的地方不僅是其高速度,更在于它適應(yīng)了現(xiàn)代I/O設(shè)備對(duì)系統(tǒng)的要求,對(duì)PCI擴(kuò)展卡及器件能進(jìn)行全自動(dòng)配置,并且只需很少的接口邏輯就可以實(shí)現(xiàn)并支持其他總線系統(tǒng)。TMS320C6211的HPI口不支持PCI總線的無縫接口。
本系統(tǒng)采用TI公司的PCI2040實(shí)現(xiàn)DSP的HPI與PCI總線的連接。DSP處理后的數(shù)據(jù)經(jīng)HPI口輸出到PCI2040進(jìn)行解碼,然后輸出到PCI總線上。其邏輯結(jié)構(gòu)如圖3所示:
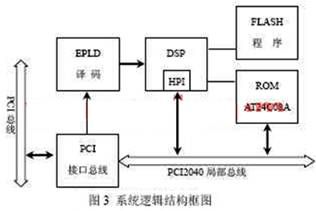
PCI2040是TI公司設(shè)計(jì)的專門用來完成C5000系列和C6000系列DSP與PCI總線進(jìn)行接口的專用芯片。PCI2040符合PCI局部總線2.2規(guī)范[6],能夠方便地實(shí)現(xiàn)PCI總線與TMS320C54X或TMS320C6X DSP的HPI接口的無縫連接。PCI2040可以兼容3.3V和5V,以適應(yīng)不同的PCI總線電壓。PCI2040與C6211之間不需要信號(hào)的電平轉(zhuǎn)換,也不需要額外的控制邏輯電路,接口電路十分簡單。
在本系統(tǒng)中,PCI2040上存在兩種電壓:5V和3.3V。其中3.3V是HPI口電壓,5V是PCI總線電壓。PCI2040啟動(dòng)時(shí)需要對(duì)其PCI總線寄存器和HPI寄存器參數(shù)進(jìn)行預(yù)加載。系統(tǒng)中PCI解碼模塊包括一塊配置ROM—AT24C08A,屬于EEPROM型ROM,便于對(duì)配置參數(shù)修改和升級(jí)。當(dāng)系統(tǒng)啟動(dòng)時(shí),存儲(chǔ)在AT24C08A的數(shù)據(jù)下載到PCI2040的寄存器中并進(jìn)行配置。
3 系統(tǒng)的軟件設(shè)計(jì)
本嵌入式圖像采集系統(tǒng)軟件包括兩部分:底層軟件和系統(tǒng)軟件。
底層軟件主要是DSP圖像處理算法以及啟動(dòng)等運(yùn)行程序。這些程序主要在CCS環(huán)境下由C語言編寫并進(jìn)行匯編優(yōu)化。CCS即Code Composer Studio,是TI公司發(fā)布的DSP軟件運(yùn)行環(huán)境。
系統(tǒng)軟件方面,在Windows操作系統(tǒng)下,可以充分利用Windows的窗口特性,一方面,因?yàn)閃indows技術(shù)成熟,軟件編寫相對(duì)比較簡單;另一方面,在Windows平臺(tái)下,PCI驅(qū)動(dòng)無需開發(fā),可以直接利用Windows的PCI驅(qū)動(dòng)程序?qū)崿F(xiàn)圖像卡的驅(qū)動(dòng)。但是Windows操作系統(tǒng)比較龐大,而且無法依照系統(tǒng)的需要進(jìn)行自由裁減,不適合做成嵌入式系統(tǒng)。因而本系統(tǒng)采用了VxWorks[7]操作系統(tǒng)。相對(duì)于Windows操作系統(tǒng),VxWorks的優(yōu)點(diǎn)表現(xiàn)在:
●VxWorks系統(tǒng)具有較好的可裁減性,可裁剪的組件超過80個(gè),用戶可根據(jù)自己系統(tǒng)的功能目標(biāo)通過交叉開發(fā)環(huán)境方便地配置。
●VxWorks支持應(yīng)用程序的動(dòng)態(tài)鏈接和動(dòng)態(tài)下載,開發(fā)者省去了每次調(diào)試都將應(yīng)用程序與操作系統(tǒng)內(nèi)核進(jìn)行鏈接和下載的步驟,縮短了編輯/調(diào)試周期。
●VxWorks具有較好的兼容性,它是最早兼容POSIX1003.1b標(biāo)準(zhǔn)的嵌入式實(shí)時(shí)操作系統(tǒng)之一。
●VxWorks具有很高的可靠性和穩(wěn)定性。
●VxWorks具有很好的實(shí)時(shí)性,實(shí)時(shí)性的強(qiáng)弱以完成規(guī)定功能和做出響應(yīng)時(shí)間的長短來衡量。VxWorks的多任務(wù)機(jī)制對(duì)任務(wù)的控制采用了優(yōu)先級(jí)搶占(Preemptive Priority Scheduling)和輪轉(zhuǎn)調(diào)度(Round-Robin Scheduling)機(jī)制。這充分保證了可靠的實(shí)時(shí)性,使同樣的硬件配置能滿足更強(qiáng)的實(shí)時(shí)性要求,為應(yīng)用的開發(fā)留下更大的余地。
PCI設(shè)備的驅(qū)動(dòng)過程主要包括下面幾個(gè)步驟:
首先,PCI設(shè)備的查找。在嵌入式操作系統(tǒng)中一般提供相應(yīng)的API函數(shù)查找。在VxWorks操作系統(tǒng)中通過函數(shù)pci FindDevice (PCI_VENDOR_ID,PCI_DEVICE,index, &pci Bus,&pci Device,&pci Func_可以找到供應(yīng)商代碼為PCI_VENDOR_ID、設(shè)備標(biāo)識(shí)為PCI_DEVICE的第n(index+1)個(gè)設(shè)備,并且返回總線號(hào)、設(shè)備號(hào)以及功能號(hào),分別保存于&pci Bus、&pci Device、&pci Func中。
其次,PCI設(shè)備的配置。通過操作系統(tǒng)提供的API函數(shù)訪問PCI設(shè)備的配置空間,配置PCI設(shè)備基址寄存器的配置、中斷配置、ROM基地址寄存器的配置等,這樣可以得到PCI的存儲(chǔ)器空間和I/O地址空間映射、設(shè)備的中斷號(hào)等。在VxWorks操作系統(tǒng)中訪問PCI設(shè)備配置空間的API函數(shù)有pciConfigOutLong、pciConfigInLong等,它們分別完成對(duì)PCI設(shè)備配置空間的讀寫操作。
最后,根據(jù)PCI設(shè)備的配置參數(shù),對(duì)不同的設(shè)備編寫初始化程序、中斷服務(wù)程序以及對(duì)PCI設(shè)備存儲(chǔ)空間的訪問程序。
很顯然,用VxWorks操作系統(tǒng)實(shí)現(xiàn)雖然有一定的難度,但是系統(tǒng)具有很大的靈活性,系統(tǒng)比較小、適應(yīng)性強(qiáng),并且可以在工業(yè)控制計(jì)算機(jī)上運(yùn)行。
5 結(jié)束語
圖像采集系統(tǒng)的關(guān)鍵在于如何對(duì)大容量的信息進(jìn)行暫存、壓縮和傳輸?shù)葐栴}進(jìn)行處理。本文作者的創(chuàng)新點(diǎn)是在某型導(dǎo)彈景象匹配制導(dǎo)系統(tǒng)中通用計(jì)算機(jī)上加入DSP加速卡實(shí)現(xiàn)的圖像采集系統(tǒng)實(shí)現(xiàn)了實(shí)時(shí)圖像采集、傳輸以及處理功能,解決了以往導(dǎo)彈景象匹配制導(dǎo)系統(tǒng)中圖像采集不穩(wěn)定、數(shù)據(jù)傳輸速度慢、暫時(shí)緩存處理能力低等問題。本系統(tǒng)既可以作為視頻圖像采集使用,也可以進(jìn)行視頻壓縮、匹配跟蹤等圖像處理的算法驗(yàn)證,具有使用靈活的特點(diǎn)。