
1 引 言
2001年,美國發(fā)明家Kamen發(fā)明了一種新型的方便快捷的兩輪交通工具“Segway”,行走平衡控制技術(shù)成為全球機器人控制技術(shù)的研究熱點。以平行雙輪電動車作為移動平臺為機器人的研究提供了技術(shù)支持,同時由于他的行為與火箭飛行和兩足機器人有很大的相似性,因而對其運動平衡控制研究具有重大的理論和實際意義。文獻[2]介紹了平行雙輪電動車的控制器電路,以C8051F020單片機為控制核心通過調(diào)整車體平臺的運行位置,從而使車體平臺始終保持平衡狀態(tài)。然而其并沒有考慮載人、載物的因素以及轉(zhuǎn)向和特殊路面、打滑等方面。再者,作為一種交通工具,由于沒有考慮初始自平衡的設(shè)計,將會給以后的產(chǎn)業(yè)化進程提出新的挑戰(zhàn)。因此需要尋找控制方法、原理均不同的其他控制理論來設(shè)計,如模糊控制、智能控制等。
一般的單片或多片微處理器不能滿足復(fù)雜、先進的控制算法時,DSP成為這種應(yīng)用場合的首選器件。TI公司推出的面向運動控制、電動機控制的TMS320x24xx系例DSP 控制器,把一個16位的定點DSP核和用于控制的外設(shè)、大容量的片上存儲器集成在單一芯片上,能夠?qū)崿F(xiàn)軟件包括電動機狀態(tài)值的采樣與計算,控制算法的實施以及PWM信號的輸出,此外還包括故障檢測與保護、數(shù)據(jù)交換與通信等。與單片機相比,在電機控制系統(tǒng)設(shè)計中,采用TMS320LF2407A具有更有效的控制能力,從而減小整個系統(tǒng)的成本。
2 平行雙輪電動車的組成
平行雙輪電動車像倒立擺一樣本身不能自然保持穩(wěn)定,必須施加適當?shù)氖侄尾拍苁怪€(wěn)定。他主要由車體平臺,兩只帶光電編碼器的小型無刷直流電機,左、右車輪和只有在靜止狀態(tài)才起作用的兩只保護導(dǎo)向輪組成。兩只無刷直流電機安裝在車體平臺的下面,通過齒輪減速機構(gòu)分別獨立驅(qū)動左、右車輪運動,具有尺寸小、操作靈活、節(jié)省能源等優(yōu)點。

平行雙輪電動車的行走機構(gòu)如圖1所示,是一種兩輪同軸左右平行布置、獨立驅(qū)動的結(jié)構(gòu),其行走機構(gòu)控制的關(guān)鍵是兩輪行走機構(gòu)在行走過程中的平衡控制。平行雙輪電動車行走機構(gòu)要求具有如下優(yōu)點:
(1)可以實現(xiàn)零半徑轉(zhuǎn)彎,具有極強的靈活性。由于只有兩個輪子,因而結(jié)構(gòu)尺寸可以做得較小,轉(zhuǎn)彎時占用的空間也相對較小。這一特點使他適用在狹窄和移動中需經(jīng)常轉(zhuǎn)彎的空間(如倉庫等)。
(2)三輪或四輪車輛在爬坡時重心會發(fā)生傾斜,因而對坡度有限制。平行雙輪電動車在爬坡時上體姿態(tài)和走平路時一樣,重心不發(fā)生傾斜,所以平行雙輪電動車可適應(yīng)更大的爬坡的坡度。
3 TMS320LF2407A
TI 公司的DSP產(chǎn)品TMS320LF2407A對電機的數(shù)字化控制非常有用。他將幾種先進外設(shè)集成在芯片內(nèi),以形成真正的單芯片控制器,從而將DSP的高速運算能力與面向電機的高效控制能力集于一體,是目前最具競爭力的數(shù)字電機控制器。TMS320LF2407A主要特點:
(1) 采用高性能靜態(tài)CMOS技術(shù),使得供電電壓降為3.3 V,減小了控制器的功耗;30 MIPS的執(zhí)行速度使得指令周期縮短到33 ns(30 MHz),從而提高了控制器的實時控制能力。
(2)片內(nèi)有高達32 kB的FLASH程序存儲器,高達1.5 kB的數(shù)據(jù)/程序RAM,544 B雙口RAM(DARAM)和2 kB的單口RAM(SARAM)。
(3) 兩個事件管理器模塊EVA和EVB,分別提供兩個16位通用定時器;8個16位的脈寬調(diào)制(PWM)通道;3個捕獲單元;10位的16通道A/D轉(zhuǎn)換器。他們能夠?qū)崿F(xiàn):三相反相器控制;PWM的對稱和非對稱波形的輸出;當外部引腳PDPINTx出現(xiàn)低電平時快速關(guān)閉PWM通道;可編程的PWM死區(qū)控制以防止上下橋臂同時輸出觸發(fā)脈沖;片內(nèi)光電編碼器接口電路用于對光電編碼器信號進行正反向計數(shù)。時間管理器模塊適用于控制交流感應(yīng)電機、無刷直流電機、開關(guān)磁阻電機、步進電機、多級電機和逆變器。
4 無刷直流電動機的DSP控制策略
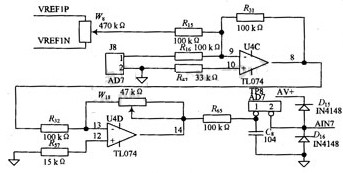
圖2是三相無刷直流電動機調(diào)速控制框圖。給定轉(zhuǎn)速與速度反饋量形成偏差,經(jīng)速度調(diào)節(jié)后產(chǎn)生電流參考值,他與電流反饋量的偏差經(jīng)電流調(diào)節(jié)后控制PWM脈沖的占空比,實現(xiàn)電動機的速度控制。電流的反饋是通過測量電阻的壓降來實現(xiàn),速度反饋則是通過霍爾位置傳感器輸出的位置量,經(jīng)過計算得到的。位置傳感器輸出的位置還用于控制換相。
5 平行雙輪電動車的控制原理
以 TMS320LF2407A為控制核心的運動控制器,根據(jù)光電編碼器和姿態(tài)傳感器檢測到的平臺運行的位移和姿態(tài)信號,通過一定的控制策略計算出控制量,再經(jīng)PWM控制及驅(qū)動器放大后驅(qū)動無刷直流電動機運轉(zhuǎn),隨時調(diào)整車體平臺的運行速度,從而使車體平臺始終保持平衡狀態(tài)。控制器電路主要由 TMS320LF2407A、電機驅(qū)動芯片、電池模塊以及外圍電路組成。其控制電路原理框圖如圖3所示。
采用微硅陀螺儀和傾角傳感器的組合構(gòu)成姿態(tài)傳感器來檢測車體平臺的運行姿態(tài)。其中,微硅陀螺儀檢測的是平臺繞轉(zhuǎn)動輪軸轉(zhuǎn)動的角速率,傾角傳感器檢測的是平臺相對于水平面的傾角。控制板采集來自傾角和角速度傳感器的信號并對信號進行調(diào)理(消波、整形、偏移),然后將信號傳送到TMS320LF2407A的 ADCIN00和ADCIN01通道中,經(jīng)過DSP的運算處理(控制算法由電動車系統(tǒng)的數(shù)學(xué)模型推導(dǎo)而出),通過DSP的兩路PWM將控制信號發(fā)出,再經(jīng)過電機驅(qū)動模塊驅(qū)動電機運轉(zhuǎn),控制小車保持平衡狀態(tài)。
6 檢測電路的工作原理
考慮到來自輸入的噪聲干擾等因素,要對傳感器的輸出電壓進行調(diào)理。相同的輸入電路共有8路(1路為傾角傳感器輸入電路;1路為角速度傳感器輸入電路;1路為小車駕駛者的轉(zhuǎn)彎信號輸入(保留功能);1路為電池電量檢測;其余4路為預(yù)留電路),下面僅就其中1路加以說明。電路圖如圖4所示。
其中U4C為多端輸入的電壓并聯(lián)負反饋電路,假設(shè)偏置電壓與傳感器輸入電壓分別為V1,V2,則:

由此得:
這里取R31=R15=R16,所以有V8=-(V1 V2),即:基本運算電路中的反相加法電路。然后將其輸出電壓V8再經(jīng)過反向放大器U4D進行放大,調(diào)節(jié)W18使輸出為0~2.4 V,其中D15與D16為過電壓保護電路。
圖5為偏置電壓產(chǎn)生電路,VREF1P,VREF1N為圖4中的偏置電壓的輸入端,由于偏置電壓值要求比較高,所以選用TL074對CPUREF這個精度比較高的電壓進行放大來提供。
7 軟件設(shè)計
軟件設(shè)計框圖如圖6所示,包括初始化部分、數(shù)據(jù)處理和轉(zhuǎn)換部分、閉環(huán)控制算法以及控制量輸出部分等。初始化程序設(shè)置用戶要求的變量和系統(tǒng)初始狀態(tài),主要完成設(shè)置系統(tǒng)寄存器初值、建立中斷、外圍部分初始化的工作。數(shù)據(jù)處理和轉(zhuǎn)換部分完成對輸入信號進行數(shù)據(jù)采集并進行平滑濾波處理。閉環(huán)控制算法根據(jù)閉環(huán)極點配置算法進行編程。
8 行走仿真
經(jīng)過對控制參數(shù)的多次調(diào)整,樣車終于能夠比較平穩(wěn)的行走。樣車在平衡狀態(tài)下(速度初始值為零)采集到有關(guān)數(shù)據(jù),通過軟件處理后生成樣車在直線行走時的速度變化折線圖,如圖7所示。樣車平臺繞輪軸的傾角變化折線圖如圖8所示。
由圖7可以看出,速度曲線首先從零點向正方向變化,且變化的速度很快,然后很快下降到零點,在零點保持一段時間后,速度曲線又很快向負方向變化,然后迅速變化到零點,保持一段時間后,速度曲線重新開始新的一個變化周期。對應(yīng)于樣車,即樣車向一個方向很快運動,然后迅速停止,保持一定時間后,又向另一個方向很快運動,然后迅速停止,保持一定時間后,再開始一個新的運動周期。
由圖8可以看出,傾角首先從零點上升到最大點,然后下降到最低點,再從最低點上升到最高點,如此周而復(fù)始,其最高點和最低點傾角絕對數(shù)值都比較小。
從速度、傾角變化折線圖可以看出:樣車在保持平衡狀態(tài)下,其直線行走的速度在一個比較窄的范圍內(nèi)繞零點周期性地變動,也就是說,樣車在有規(guī)律地做往返振蕩運動;樣車繞輪軸的傾角圍繞零點在一個較小的范圍內(nèi)做有規(guī)律的波動。從上面的變化規(guī)律可以看出,樣車處于一個動平衡的狀態(tài),因此可以得出這樣的結(jié)論:控制系統(tǒng)的建模和控制器的設(shè)計是合理有效的,完全可以通過一系列的控制手段,較好地實現(xiàn)平行雙輪電動車的行走。
9 結(jié) 語
本文針對平行雙輪電動車的技術(shù)要求和具體特點,以美國TI公司生產(chǎn)的TMS320LF2407A作為控制核心,將DSP芯片運用于平行雙輪電動車的控制系統(tǒng)設(shè)計中,可以實現(xiàn)硬件體積小、系統(tǒng)抗干擾能力強、響應(yīng)速度快、控制方案靈活等特點。對其后續(xù)的研究工作,如電機的控制可以引入多種控制策略,以求得到更好的控制性能、精度和轉(zhuǎn)矩的平穩(wěn)性,具有深遠的意義。