
針對目前采用的簡易氣象綜合觀測儀,存在著實時性差、精度不夠、作業(yè)時間長以及不能直接計算射擊條件修正量和地面風修正量等諸多問題,本文提出基于MSP430F149單片機設計一種炮兵氣象儀,以滿足炮兵分隊射擊時的簡易氣象條件和火箭炮地面風修正的需要。
氣象儀的功能和基本工作原理
氣象儀的功能包括:①實時測定風向、風速、氣溫和氣壓等氣象條件,為炮兵射擊提供簡易氣象條件修正量;②實時測定火箭炮陣地的地面風向和風速,為火箭炮分隊提供地面風修正量。
炮兵氣象儀用于實現(xiàn)地面氣象條件風向、風速、氣溫、氣壓的自動測量和射擊條件修正量及火箭炮地面風修正量的自動計算。其基本工作原理是:將氣象儀與處理機通過數(shù)據(jù)線相連,通過升降桿將氣象儀升至要求的高度后,風的作用使風標指向風吹來的方向,磁方位傳感器即感應出風向磁方位角;風速葉輪隨風速以不同的轉(zhuǎn)速旋轉(zhuǎn),每轉(zhuǎn)一圈即產(chǎn)生一個脈沖信號,通過單位時間內(nèi)計數(shù)即可計算出風速;氣溫、氣壓傳感器感應出當時的氣溫和氣壓。以上數(shù)據(jù)經(jīng)氣象儀數(shù)據(jù)處理后傳輸給處理機,處理機按要求以固定格式顯示。氣象儀組成如圖1所示。

圖1 氣象儀組成框圖
氣象儀硬件設計
氣象儀的任務是實現(xiàn)大氣壓力、溫度、風向和風速的實時測量,由壓力傳感器、溫度傳感器、風速傳感器、磁方位風向傳感器、數(shù)據(jù)采集與處理電路、風標、連接座等組成,其基本設計思想是在滿足精度和使用環(huán)境要求的前提下,體積小、重量輕,便于野戰(zhàn)條件下使用。
傳感器的選型
(1)壓力、溫度傳感器
壓力和溫度傳感器采用帶預處理電路的模擬輸出傳感器,以簡化后續(xù)電路的設計。
壓力傳感器選用美國Honeywell公司的ASDX015絕壓傳感器。
溫度傳感器選用美國Dallas公司推出的基于單總線技術的數(shù)字溫度計芯片DS1820,便于調(diào)整傳感器的位置和方向,使其能有效感應外界溫度。
(2)風速傳感器
對于風速的測量,可以選用的傳感器種類很多。綜合比較后,選用葉輪式風速傳感器,利用霍爾效應測量風速。該方式與光電編碼相比更可以做到氣象儀整體小巧、結(jié)構緊湊,攜帶使用方便。
(3)風向傳感器
磁方位傳感器,也就是通常所說的電子羅盤,軍用、民用產(chǎn)品比較多。本文選用由平面電子羅盤XW3200和風標組成磁方位風向傳感器。
該傳感器通過兩軸磁阻傳感器測量平面地磁場,雙軸傾角補償,內(nèi)置微處理器計算傳感器與磁北夾角,兩軸磁阻傳感器的方向受風標的帶動,始終指向風吹來的方向,則其輸出的角度即為風向磁方位角。整個測量過程無需定向,操作簡便靈活。
電路設計
氣象儀的電路設計的任務是對風速傳感器輸出的脈沖序列進行單位時間計數(shù),對壓力傳感器輸出的模擬信號進行A/D轉(zhuǎn)換,基于單總線技術讀溫度數(shù)據(jù),接收風向磁方位傳感器通過RS-232S輸出的數(shù)據(jù)及與處理機互傳數(shù)據(jù)等。
主控芯片簡介
數(shù)據(jù)處理部分采用MSP430F149作為系統(tǒng)的主芯片,該芯片是美國TI公司推出的超低功耗微處理器。MSP430F149有60KB+256字節(jié)FLASH,2KB RAM,包括以下模塊:
①基本時鐘模塊:包括1個數(shù)控振蕩器(DCO)和2個晶體振蕩器。
②看門狗定時器Watchdog Timer,可用作通用定時器。
③帶3個捕獲/比較寄存器和PWM輸出的16位定時器Timer A。
④帶7個捕獲/比較寄存器和PWM輸出的16位定時器Timer B。
⑤2個具有中斷功能的8位并行端口:P1和P2。
⑥4個8位并行端口:P3、P4、P5和P6。
⑦模擬比較器Comparator A。
⑧12位A/D轉(zhuǎn)換器ADC 12。
⑨2個串行通信接口USART0與USART1。
電源電路設計
該氣象儀為電池供電系統(tǒng),因此對系統(tǒng)的總體功耗有較高的要求,為了降低功耗,選用MSP430系列的單片機,該系列的單片機工作電壓為1.8V~3.6V,并且具有休眠功能,耗電電流在0.1µA~400µA之間,具有極低的功耗。
主控芯片MSP430單片機電源電壓為3.3V,外圍傳感器的工作電壓要求為5V,兩節(jié)7號充電電池電壓為2.4V,因此電源電路的設計采用升壓DC-DC芯片NCP1400ASN30T1和NCP1400ASN50T1,可將0.8V~3V的電壓升至3.3V和5V,分別為單片機和外圍器件供電,同時設計有電源關斷功能,當無需外圍器件工作時,將外圍器件的供電全部切斷,減少了整體功耗,電源電路原理見圖2。
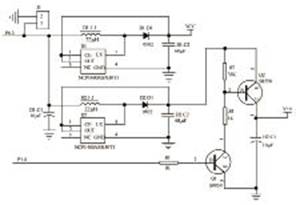
圖2 電源電路原理圖
主控電路設計
主控電路可以分為溫度測量電路,壓力測量電路,風速測量電路,風向測量電路和通信電路等。
(1)溫度測量電路
溫度測量電路如圖3所示,測量時采用數(shù)字溫度傳感器DS1820,將采集到的溫度數(shù)據(jù)通過主芯片MSP430F149的P6.5引腳傳送給主芯片。根據(jù)系統(tǒng)的需要和實際情況,采用外接電源供電方式,主芯片的P6.5腳用于DS1820的數(shù)據(jù)輸入/輸出引腳。

圖3 溫度測量電路圖
(2)壓力測量電路
壓力測量電路如圖4所示。壓力的測量采用絕壓傳感器ASDX015,其采集模擬信號,并將模擬電壓傳入主芯片,通過主芯片的A/D轉(zhuǎn)換模塊將模擬信號轉(zhuǎn)化為數(shù)字信號,所以必須連接在主芯片具有A/D轉(zhuǎn)換功能的引腳上。MSP430F149的P6口具有8路A/D轉(zhuǎn)換通道,壓力傳感器連接于主芯片的P6.4引腳。在實現(xiàn)A/D轉(zhuǎn)換功能時,使用內(nèi)部參考電壓2.5V作為A/D轉(zhuǎn)換的電壓基準,但是壓力傳感器的輸出范圍為0~4V,所以在壓力傳感器的輸出端需設計有分壓電路。
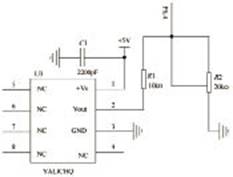
圖4 壓力測量電路圖
(3)風速測量電路
風速測量電路如圖5所示,風速的測量是采用葉輪式風速傳感器,風速傳感器與主芯片的連接只需要普通I/O接口,其連接于P1.0引腳,主芯片的P1.0引腳接收霍爾傳感器產(chǎn)生的電磁脈沖。
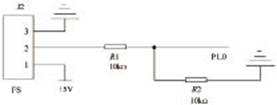
圖5 風速測量電路圖
(4)風向測量電路
風向測量電路如圖6所示。系統(tǒng)采用由平面電子羅盤XW3200和風標組成的磁方位風向傳感器來進行風向測量,采用集成電路轉(zhuǎn)換芯片MAX3232來實現(xiàn)電平轉(zhuǎn)換,MAX3232芯片能實現(xiàn)電平的雙向轉(zhuǎn)換。該芯片包含兩路接收器和驅(qū)動器IC芯片,內(nèi)部有一個電源轉(zhuǎn)換器,可以把輸入的+5V電壓變換成為RS232輸出電平所需要的-10V~+10V電壓。
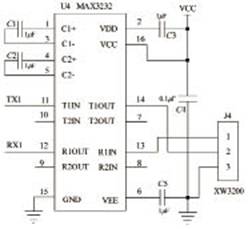
圖6 風向測量電路圖
(5)通信電路
氣象儀通過RS485實現(xiàn)與數(shù)據(jù)處理系統(tǒng)通信,RS485是一種多點通信標準,采用差分信號進行傳輸,具有較高的抗共模干擾能力;能夠檢測到200mV電壓,具有較高的靈敏度;數(shù)據(jù)最高傳輸速率為10Mb/s。MAX485連接主芯片的USART0,P3.3連接MAX485的控制引腳,當P3.3為低電平時接收數(shù)據(jù),為高電平時發(fā)送數(shù)據(jù),C1為電源濾波電容,A、B端連接有120Ω的電阻,通信電路如圖7所示。
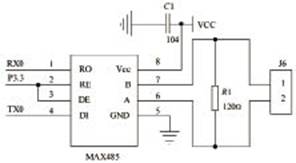
圖7 通信電路圖
(6)晶振電路和復位電路
MSP430F149可接入2個外部振蕩器,一個為低速晶體振蕩器,經(jīng)過XIN和XOUT兩個引腳相連,另一個為高速晶體振蕩器,經(jīng)過XT2IN和XT2OUT兩個引腳,根據(jù)需要外接電容,范圍可以為450KHz~8MHz。外部晶振頻率的選擇與系統(tǒng)供電電壓有著密切關系,根據(jù)氣象儀的實際需要,選擇了4M外部有源晶振,輸出直接接入晶振的XT2IN引腳,XT2OUT空。
復位電路的設計要能使系統(tǒng)可靠復位,并在各種復雜情況下穩(wěn)定工作,在MSP430F149單片機中有一RST復位管腳,它與不可屏蔽中斷功能管腳復用,可由軟件選擇其功能,正常情況下為復位功能。系統(tǒng)采用外接芯片復位,在復位腳上連接復位芯片HT7027。
氣象儀軟件設計
氣象儀的軟件設計共有以下任務:
(1)完成硬件系統(tǒng)如特殊功能寄存器和I/O口等的初始化。
(2)具有溫度、壓力、風速和風向傳感器初始化和檢查功能。
(3)具有對溫度傳感器采集的溫度數(shù)字信號接收和存儲功能。
(4)具有對壓力傳感器采集模擬信號實施A/D轉(zhuǎn)換并存儲功能。
(5)具有對風速傳感器產(chǎn)生的脈沖信號實施計數(shù)、計算和存儲功能。
(6)完成通信接口的初始化功能,實現(xiàn)與風向傳感器以及數(shù)據(jù)處理系統(tǒng)的數(shù)據(jù)傳輸。
(7)具有電源檢測,轉(zhuǎn)換低功耗狀態(tài)的功能。
(8)具有數(shù)據(jù)濾波功能,剔除采集到的誤差較大的數(shù)據(jù)。
氣象儀軟件包含主程序模塊、溫度數(shù)據(jù)采集模塊、壓力數(shù)據(jù)采集模塊、風速數(shù)據(jù)采集模塊、風向數(shù)據(jù)采集模塊、通信模塊以及數(shù)據(jù)濾波模塊等。
主程序的基本流程為氣象儀在接收到處理機的命令后,通過各傳感器采集數(shù)據(jù),并將數(shù)據(jù)存放到指定寄存器中,進行數(shù)據(jù)濾波,將采集到的數(shù)據(jù)通過RS485傳送給處理機,其流程如圖8所示。

圖8 氣象儀主程序流程圖
從風向、風速、溫度和壓力傳感器采集到的數(shù)據(jù),因受多種因素的影響,可能存在不符合條件或測量誤差較大的數(shù)據(jù),為了保證測量的精確性,必須對所得到的數(shù)據(jù)進行篩選,剔除精確性較差的數(shù)據(jù)。為此,對采集到的數(shù)據(jù),采用每十個求取平均值,剔除與平均值差值較大的數(shù)據(jù),再將剩余的精確數(shù)據(jù)求平均值,其平均值即為測量所需的風速、風向、壓力和溫度數(shù)據(jù)。
結(jié)束語
本文基于MSP430系列超低功耗單片機設計了一種高效、高精度、自動化炮兵氣象儀,用以滿足炮兵部隊訓練所需。本文根據(jù)系統(tǒng)要求,選擇了合適的壓力傳感器、溫度傳感器、風速傳感器和風向傳感器,并完成了氣象儀硬件和軟件設計。該氣象儀性能可靠、工作穩(wěn)定,能夠滿足部隊訓練使用精度和技術性能指標要求。