
由于火箭炮發(fā)射的是簡(jiǎn)易控制火箭彈,因此其定向管與火箭彈之間的電氣信號(hào)接口除了與普通無(wú)控火箭彈一樣具有點(diǎn)火信號(hào)接口外,還另有一個(gè)32芯參數(shù)裝定信號(hào)接口。在發(fā)射程序中,如果火控系統(tǒng)計(jì)算的火箭彈的飛行控制參數(shù)能夠準(zhǔn)確地裝定至火箭彈的控制系統(tǒng)中,則火箭彈按照簡(jiǎn)易控制方式飛行,否則按照無(wú)控方式飛行,導(dǎo)致火箭彈的射擊精度大大下降。為了確保火箭彈能夠順利發(fā)射以及射擊的準(zhǔn)確性,在技術(shù)陣地進(jìn)行裝填之前,需要對(duì)火箭炮上的點(diǎn)火信號(hào)線路以及參數(shù)裝定線路進(jìn)行嚴(yán)格檢測(cè),確保信號(hào)線路處于良好的工況。
對(duì)于發(fā)控系統(tǒng)的檢測(cè),在火箭炮配套的機(jī)電檢測(cè)維修車上有發(fā)控時(shí)序檢測(cè)裝置,用于定性檢查定向管的發(fā)控時(shí)序。該檢測(cè)裝置不能對(duì)檢測(cè)結(jié)果進(jìn)行量化處理與顯示,檢測(cè)時(shí)只能通過(guò)LED的亮滅來(lái)確定發(fā)控系統(tǒng)是否正常,對(duì)于處于臨界故障狀態(tài)的線路則不能定量觀察,具有一定的局限性。
本文基于MSP430F149單片機(jī),設(shè)計(jì)一種發(fā)控時(shí)序檢測(cè)系統(tǒng)。該系統(tǒng)運(yùn)用數(shù)字信號(hào)處理技術(shù)、計(jì)算機(jī)自動(dòng)控制技術(shù)等,在點(diǎn)火觸頭和對(duì)接插頭采集發(fā)控信號(hào),并對(duì)信號(hào)的電壓幅值、電流大小、信號(hào)噪聲、信號(hào)上升、下降沿寬度進(jìn)行分析,顯示檢測(cè)信號(hào)與標(biāo)準(zhǔn)值的偏差并給出評(píng)估值;同時(shí)檢測(cè)對(duì)接的可靠性,對(duì)同一號(hào)管進(jìn)行三次對(duì)接并分析信號(hào)的差異,從而評(píng)估對(duì)接的可靠性;詳細(xì)記錄每次的檢測(cè)數(shù)據(jù),每次檢測(cè)時(shí)都與歷史數(shù)據(jù)進(jìn)行對(duì)比分析,得出同一號(hào)管數(shù)據(jù)的變化規(guī)律及與其他所有管數(shù)據(jù)的一致性,從而確定發(fā)控系統(tǒng)的潛在故障,給出維修指導(dǎo)。該檢測(cè)系統(tǒng)不僅使檢測(cè)數(shù)據(jù)準(zhǔn)確、過(guò)程簡(jiǎn)化,還節(jié)省時(shí)間,能有效提高火箭炮的作戰(zhàn)效能。
發(fā)控時(shí)序檢測(cè)系統(tǒng)總體方案設(shè)計(jì)
檢測(cè)系統(tǒng)主要功能
本系統(tǒng)主要實(shí)現(xiàn)對(duì)火箭炮發(fā)控裝置的日常維護(hù)和故障檢測(cè),系統(tǒng)具有如下功能:
(1)定向管發(fā)控時(shí)序信號(hào)的檢測(cè);
(2)火箭發(fā)動(dòng)機(jī)點(diǎn)火信號(hào)的檢測(cè);
(3)直觀顯示檢測(cè)內(nèi)容和檢測(cè)結(jié)果;
(4)系統(tǒng)自檢;
(5)檢測(cè)過(guò)程聲音提示;
(6)超標(biāo)參數(shù)聲音和燈光報(bào)警;
(7)檢測(cè)結(jié)果現(xiàn)場(chǎng)打印;
(8)檢測(cè)結(jié)果斷電保存和回查;
(9)與串行主機(jī)通信。
檢測(cè)系統(tǒng)結(jié)構(gòu)組成
為了能實(shí)現(xiàn)系統(tǒng)的靈活性,系統(tǒng)利用串口來(lái)實(shí)現(xiàn)與微機(jī)之間的通信;同時(shí),系統(tǒng)要便于攜帶。根據(jù)系統(tǒng)功能,檢測(cè)系統(tǒng)結(jié)構(gòu)如圖1所示。
由圖1可知,本系統(tǒng)主要由直流穩(wěn)壓電源模塊、模擬輸入多芯切換單元、模數(shù)轉(zhuǎn)換單元、數(shù)據(jù)處理單元、LCD顯示模塊及串行通信接口等部分組成。
發(fā)控時(shí)序檢測(cè)系統(tǒng)硬件設(shè)計(jì)

圖1 系統(tǒng)結(jié)構(gòu)框圖
基于MSP430F149的最小系統(tǒng)設(shè)計(jì)
MSP430F149單片機(jī)適合于許多較復(fù)雜控制應(yīng)用場(chǎng)合,選用該芯片來(lái)構(gòu)建最小系統(tǒng),完全能滿足系統(tǒng)正常工作的要求。本系統(tǒng)基于MSP430F149所設(shè)計(jì)的最小系統(tǒng)作為硬件的核心控制部分,系統(tǒng)除了包括單片機(jī)正常工作所必須的電源電路和復(fù)位電路外,還包括多芯切換電路、鍵盤和液晶顯示電路、通信接口電路、數(shù)據(jù)存儲(chǔ)電路和聲音報(bào)警電路等。
電源電路設(shè)計(jì)
在單片機(jī)應(yīng)用中必須提供復(fù)位信號(hào),以保證單片機(jī)能正確復(fù)位,從而進(jìn)入正確的工作狀態(tài)。此外,單片機(jī)也需要穩(wěn)定的電壓信號(hào),因此必須提供電源電路。電源電路及復(fù)位電路如圖2所示。圖中,輸入的電壓經(jīng)TPS70633芯片轉(zhuǎn)換成3.3V的電壓,以滿足單片機(jī)的工作電壓要求。通過(guò)MAX809STR產(chǎn)生復(fù)位信號(hào)送給單片機(jī)。為了減小干擾,每個(gè)芯片的電源端都加上一個(gè)0.1μF的電容進(jìn)行濾波處理。
多芯自動(dòng)切換電路設(shè)計(jì)
在自動(dòng)測(cè)試系統(tǒng)中,經(jīng)常需要對(duì)多路數(shù)據(jù)進(jìn)行采集,有時(shí)還需在不同的測(cè)試流程中獲取不同通道的數(shù)據(jù)信號(hào)。以前人們常通過(guò)增加A/D采樣前端的模擬開關(guān)數(shù)目來(lái)解決,但是如果檢測(cè)系統(tǒng)中含有高壓電路的切換,模擬開關(guān)則不再合適,繼電器在這方面則具有明顯的優(yōu)勢(shì),其具有能夠切換較大電流和電壓的能力,同時(shí)還可以使驅(qū)動(dòng)控制電路與被控觸點(diǎn)電路完全隔離,使用安全系數(shù)高。
在選擇繼電器時(shí),綜合考慮實(shí)際的技術(shù)要求、功能特性和環(huán)境適應(yīng)性,參照繼電器的性能參數(shù)、體積大小、安裝方式、負(fù)載特性等,本方案選擇了松下公司生產(chǎn)的TX2-5V繼電器作為測(cè)量電路切換的開關(guān)器件。該繼電器具有響應(yīng)時(shí)間快、耐壓值高、體積小和功耗低等優(yōu)點(diǎn),可以滿足測(cè)試時(shí)的長(zhǎng)時(shí)間連續(xù)掃描和在高壓下工作的要求。
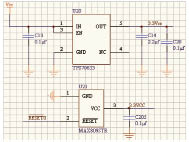

圖3 多芯自動(dòng)切換電路原理圖
32芯電纜的點(diǎn)火裝置的端電壓和回路電阻的測(cè)量,是相對(duì)于火箭炮系統(tǒng)地,檢測(cè)系統(tǒng)還需對(duì)模擬信號(hào)進(jìn)行調(diào)整、模數(shù)轉(zhuǎn)換、單片機(jī)處理數(shù)據(jù),因此,多芯自動(dòng)切換電路,既要實(shí)現(xiàn)恒壓、恒流的自動(dòng)切換,又要實(shí)現(xiàn)多路信號(hào)之間的切換。電路設(shè)計(jì)時(shí)每芯采用一個(gè)雙路繼電器實(shí)現(xiàn)切換,既能實(shí)現(xiàn)該芯電纜的恒壓、恒流的加載,又能實(shí)現(xiàn)多路信號(hào)的測(cè)量與切換。自動(dòng)切換電路原理如圖3所示,圖中,在IN31之前省略了IN1~IN30,IN1~IN30的線路連接與IN31的相同;J32的1引腳與J1的6引腳相連接。
數(shù)據(jù)采集電路設(shè)計(jì)
A/D芯片選型
模/數(shù)轉(zhuǎn)換器是一種器件,簡(jiǎn)稱為A/D,它把采集到的采樣模擬信號(hào)經(jīng)量化和編碼后,轉(zhuǎn)換成數(shù)字信號(hào)并輸出。為滿足雷達(dá)、圖像處理、高速數(shù)據(jù)采集系統(tǒng)等對(duì)于高速度、高精度A/D轉(zhuǎn)換器的需求,一些IC廠家相繼推出了流水線結(jié)構(gòu)的A/D轉(zhuǎn)換器,德州儀器公司的ADS1241芯片便是其中一款。
ADS1241是一款高性能、寬動(dòng)態(tài)范圍、高精度的24位A/D轉(zhuǎn)換芯片。該芯片具有以下特性:①24位的A/D轉(zhuǎn)換;②可以通過(guò)程序來(lái)設(shè)置增益和輸出速率;③外部提供差分方式的參考電壓源,外部參考電壓為0.1V~5V;④具有片內(nèi)自校正功能;⑤采用SPI串口與其他芯片接口;⑥低功耗:功耗只有600μW;⑦具有較寬的工作電壓,電壓范圍為2.7V~5.5V;⑧最多可以實(shí)現(xiàn)8路模擬采集。ADS1241芯片內(nèi)部提供復(fù)用器和緩沖區(qū)來(lái)實(shí)現(xiàn)多路采集,此外,芯片內(nèi)部還進(jìn)行濾波處理。
A/D芯片接口電路設(shè)計(jì)
ADS1241需要外部時(shí)鐘才能工作,因此需要在XIN和XOUT管腳外接晶體,提供芯片工作時(shí)所需要的時(shí)鐘。本系統(tǒng)采用的是頻率為2.4576MHz的晶體,電容為20pF,電容的選擇是與晶體的頻率有關(guān)系的。ADS1241通過(guò)SPI串口與單片機(jī)進(jìn)行連接,這里使用的是4線方式,即SCLK、DIN、DOUT和CS管腳與單片機(jī)進(jìn)行連接。另外,ADS1241的DRDY管腳與單片機(jī)的一般I/O管腳進(jìn)行連接,這樣可以通過(guò)該管腳來(lái)判斷是否準(zhǔn)備好,由于該管腳輸出低電平有效,因此需要將該管腳拉高。ADS1241接口電路如圖4所示。
在圖4中,數(shù)字電源和模擬電源都采用3.3V電壓供電,為了減小電源處的干擾,因此需要加0.1μF的電容進(jìn)行濾波處理。本系統(tǒng)中也將數(shù)字地和模擬地接在一起,但在某些具體的應(yīng)用中可能需要將數(shù)字地和模擬地分開。AS1241的外部參考電源可以是差分方式,也可以是非差分方式,本系統(tǒng)中采用非差分方式,因此只需要將Vref+管腳接外部參考電源,Vref-管腳接地就可以了。在本系統(tǒng)中,將PWND管腳接高電平,使該芯片一直處于工作狀態(tài);低功耗場(chǎng)合下,可以將該管腳與單片機(jī)的一般I/O進(jìn)行連接,通過(guò)單片機(jī)來(lái)控制ADS1241的低功耗狀態(tài)。
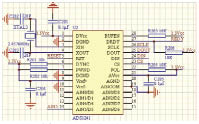
圖4 ADS1241接口電路圖
數(shù)據(jù)存儲(chǔ)電路設(shè)計(jì)
檢測(cè)系統(tǒng)數(shù)據(jù)存儲(chǔ)選用大容量的EEPROM CAT24WC256,它是一個(gè)256K位串行CMOS EEPROM,內(nèi)部含有32768個(gè)字節(jié),每字節(jié)為8位。CATALYST公司的先進(jìn)CMOS技術(shù)減少了器件的功耗,CAT24WC256有一個(gè)64字節(jié)頁(yè)寫緩沖器,該器件通過(guò)I2C總線接口進(jìn)行操作,如圖5所示。
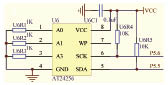
圖5 數(shù)據(jù)存儲(chǔ)電路原理圖
測(cè)量電路設(shè)計(jì)
發(fā)控時(shí)序電壓測(cè)量電路設(shè)計(jì)
輸出電壓VS分壓后進(jìn)行差分采樣,采樣后送給單片機(jī)進(jìn)行AD采樣,通過(guò)AD采樣值與設(shè)定值進(jìn)行比較實(shí)現(xiàn)過(guò)壓警告和過(guò)壓保護(hù),同時(shí)AD采樣值可以通過(guò)通訊接口上傳計(jì)算機(jī),進(jìn)行該路輸出電壓顯示,電壓檢測(cè)電路如圖6所示。
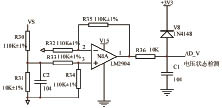
圖6 電壓測(cè)量電路圖
發(fā)控時(shí)序電流測(cè)量電路設(shè)計(jì)
采樣電流用平衡式電流互感器進(jìn)行電流檢測(cè),輸出電流信號(hào)轉(zhuǎn)化成電壓信號(hào)送給單片機(jī)進(jìn)行AD采樣,通過(guò)AD采樣值與設(shè)定值進(jìn)行比較實(shí)現(xiàn)過(guò)流警告和過(guò)流保護(hù),電流檢測(cè)電路如圖7所示。電流信號(hào)產(chǎn)生兩路模擬電壓信號(hào)送給單片機(jī)進(jìn)行采樣,保障在電流全范圍內(nèi)的精度。

點(diǎn)火負(fù)載阻值測(cè)量電路設(shè)計(jì)
火箭炮發(fā)動(dòng)機(jī)點(diǎn)火負(fù)載電阻值通常很小,使用通用器材和方法測(cè)量達(dá)不到要求的精度。雙臂電橋測(cè)小電阻很準(zhǔn)確,但是測(cè)量使用大電流,線纜容易發(fā)熱,影響檢測(cè)結(jié)果,如要精確測(cè)定,則需調(diào)平衡,所以不能滿足快速測(cè)試的要求。為了準(zhǔn)確測(cè)定點(diǎn)火電阻,本系統(tǒng)采用帶溫控反饋的恒流源以及高精度比例運(yùn)放測(cè)量點(diǎn)火負(fù)載電阻,而且儀器通過(guò)自檢的方式排除系統(tǒng)誤差(包括系統(tǒng)線路阻值和接觸點(diǎn)阻值等),點(diǎn)火回路電阻的測(cè)量原理如圖8所示。
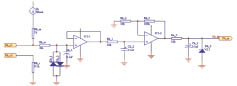
圖8 點(diǎn)火負(fù)載阻值測(cè)量原理圖
本系統(tǒng)中,根據(jù)測(cè)定電阻的范圍和精度要求,選擇DH900型精密恒流三極管,使用電阻調(diào)節(jié),測(cè)定標(biāo)準(zhǔn)恒流為20mA。
恒流三極管有極好的恒流和調(diào)整特性,溫度系數(shù)低、電流穩(wěn)定度高,是一種精密的集成電路恒流器件。國(guó)產(chǎn)的DH900系統(tǒng)為新型超精密恒流源器件,恒流范圍擴(kuò)展到1μA~20A,可并聯(lián)使用、可遠(yuǎn)距離傳輸,負(fù)載可斷開等。
單片機(jī)控制電路設(shè)計(jì)
鍵盤電路設(shè)計(jì)
在單片機(jī)應(yīng)用系統(tǒng)中,通常具有人機(jī)對(duì)話功能,能隨時(shí)發(fā)出各種控制命令和數(shù)據(jù)輸入以及報(bào)告應(yīng)用系統(tǒng)的運(yùn)行狀態(tài)與運(yùn)行結(jié)果。本系統(tǒng)人機(jī)交互的主要作用是選擇檢測(cè)內(nèi)容、查看檢測(cè)結(jié)果、控制通信和打印等,沒(méi)有設(shè)計(jì)數(shù)據(jù)輸入,而且檢測(cè)過(guò)程是自動(dòng)控制,所以只需要幾個(gè)功能按鍵。系統(tǒng)采用獨(dú)立式端口鍵,每個(gè)按鍵接入一個(gè)中斷引腳,采用端口中斷方式獲取鍵值,如圖9所示。
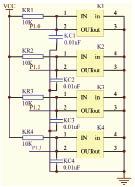
圖9 鍵盤電路圖
液晶顯示電路設(shè)計(jì)
液晶顯示的原理是利用液晶的物理特性,通過(guò)電壓對(duì)其顯示區(qū)域進(jìn)行控制,有電就有顯示,這樣即可顯示出圖形。液晶顯示器按其顯示方式分為點(diǎn)陣式、段式、字符式等。點(diǎn)陣液晶顯示器具有體積小、重量輕、外形薄、耗能小、工作電壓低、無(wú)輻射,特別是視域?qū)挕@示信息量大等優(yōu)點(diǎn)。
本文選用的LM2029-6液晶顯示屏是一種圖形點(diǎn)陣液晶顯示器,它主要由行驅(qū)動(dòng)器/列驅(qū)動(dòng)器及320×240全點(diǎn)陣液晶顯示器組成,可完成圖形顯示,也可以顯示漢字。主要技術(shù)參數(shù)和性能:①電源VDD為+5V,模塊內(nèi)自帶-10V負(fù)壓,用于LCD的驅(qū)動(dòng)電壓;②顯示內(nèi)容為320(列)×240(行)點(diǎn);③全屏幕點(diǎn)陣;④七種指令;⑤與CPU接口采用8位數(shù)據(jù)總線并行輸入輸出和8條控制線;⑥占空比1/64;⑦工作溫度為-10℃~+55℃。
液晶顯示屏通過(guò)一個(gè)20腳的插座與主芯片相連,通過(guò)一個(gè)50K的可調(diào)電阻調(diào)節(jié)驅(qū)動(dòng)電壓的大小控制液晶的亮度,通過(guò)兩個(gè)三極管控制液晶的背光,如圖10所示。P1.5控制液晶顯示數(shù)據(jù)/顯示指令數(shù)據(jù),P1.6控制數(shù)據(jù)的讀/寫,P1.7控制使能信號(hào),P2的8個(gè)引腳作為數(shù)據(jù)引腳,P3.0和P3.1作為液晶的片選信號(hào),P4.1控制液晶的背光顯示。

圖10 液晶顯示電路圖
通信接口電路設(shè)計(jì)
通信接口擔(dān)負(fù)與外圍的串行主機(jī)數(shù)據(jù)交換和支持打印等任務(wù)。
串行通訊只需較少的端口就可以實(shí)現(xiàn)單片機(jī)和PC機(jī)的互通,具有無(wú)可比擬的優(yōu)勢(shì)。MSP430系列都有USART模塊來(lái)實(shí)現(xiàn)串行通信。在本設(shè)計(jì)中,MSP430F149的USART模塊通過(guò)RS232串口與外圍的串行主機(jī)通信。系統(tǒng)采用專用電平轉(zhuǎn)換芯片MAX3232來(lái)實(shí)現(xiàn)電平轉(zhuǎn)換,如圖11所示。MAX3232芯片是MAXIM公司生產(chǎn)的電平轉(zhuǎn)換芯片,包含兩路接收器和驅(qū)動(dòng)器,性能可靠。
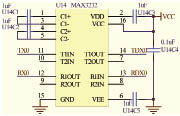
圖11 通信接口電路原理圖
聲音蜂鳴報(bào)警電路設(shè)計(jì)
聲音報(bào)警使用蜂鳴器,通過(guò)I/O端口輸出脈沖控制,改變脈沖的頻率和作用時(shí)間進(jìn)行不同種類的提示或者報(bào)警。為了提高驅(qū)動(dòng)能力,讓蜂鳴器產(chǎn)生一定強(qiáng)度的聲音,采用了對(duì)稱的晶體管驅(qū)動(dòng),其電路如圖12所示。
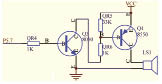
圖12 聲音蜂鳴報(bào)警電路原理圖
發(fā)控時(shí)序檢測(cè)系統(tǒng)軟件設(shè)計(jì)
為了便于軟件系統(tǒng)的維護(hù)和以后硬件系統(tǒng)升級(jí)與改動(dòng),本系統(tǒng)軟件采用模塊化、結(jié)構(gòu)化設(shè)計(jì)和程序編寫,各個(gè)硬件模塊獨(dú)立開發(fā)驅(qū)動(dòng)接口,同時(shí)提供與硬件無(wú)關(guān)的應(yīng)用程序接口,這樣如果硬件因資源問(wèn)題需要改動(dòng)時(shí),只需要修改該硬件的驅(qū)動(dòng)程序,省去了修改與該硬件相關(guān)的應(yīng)用軟件和主系統(tǒng)軟件的繁瑣,大大提高了軟件開發(fā)和維護(hù)效率。系統(tǒng)軟件結(jié)構(gòu)如圖13所示。

圖13 系統(tǒng)軟件結(jié)構(gòu)框圖
系統(tǒng)軟件共分四層:硬件層、驅(qū)動(dòng)層、接口層和應(yīng)用層。硬件層提供系統(tǒng)數(shù)據(jù)采集、數(shù)字處理和輸入輸出控制支持;驅(qū)動(dòng)層提供各個(gè)硬件使用和操作的驅(qū)動(dòng)支持,保證軟件功能通過(guò)相應(yīng)的硬件設(shè)備完成;接口層提供與各個(gè)硬件模塊無(wú)關(guān)的應(yīng)用程序使用接口以及系統(tǒng)時(shí)序和邏輯控制服務(wù);應(yīng)用層主要完成檢測(cè)任務(wù)和相關(guān)的環(huán)境設(shè)置等功能。
結(jié)束語(yǔ)
本文根據(jù)某型火箭炮發(fā)控時(shí)序信號(hào)的特點(diǎn)和檢測(cè)需求,基于MSP430F149單片機(jī)設(shè)計(jì)了發(fā)控時(shí)序檢測(cè)系統(tǒng)。論文給出了系統(tǒng)總體設(shè)計(jì)方案,詳細(xì)介紹了發(fā)控時(shí)序檢測(cè)系統(tǒng)各個(gè)部分硬件和軟件的具體實(shí)現(xiàn)方法。該系統(tǒng)工作穩(wěn)定可靠、效率高,且檢測(cè)數(shù)據(jù)精度高。