
1、引言
隨著工業(yè)控制系統(tǒng)逐步的自動化,現(xiàn)代化,現(xiàn)場總線控制系統(tǒng)得到越來越多的重視和應(yīng)用,CAN總線是目前開發(fā)簡單,性能價格比高的一種現(xiàn)場總線 。相對其他現(xiàn)場總線而言,CAN通信控制器的生產(chǎn)廠家最多、品種最全、應(yīng)用也最為廣泛。基于現(xiàn)場總線控制系統(tǒng)智能化、復(fù)雜度的提高,作為現(xiàn)場總線的核心部件微處理器,傳統(tǒng)的51芯片,甚至ARM7已經(jīng)逐漸不能滿足需要,ARM9成為合適的選擇。但許多ARM9并沒有集成CAN接口,擴展CAN接口成為當務(wù)之急。且ARM9將數(shù)據(jù)地址總線分開,而CAN控制器為數(shù)據(jù)地址總線復(fù)用,使得CAN的擴展不能一味照搬51處理器的方式。在CAN模塊驅(qū)動開發(fā)上,現(xiàn)有資料往往只針對Linux系統(tǒng)上的驅(qū)動開發(fā) 進行介紹,而現(xiàn)場總線控制系統(tǒng)對實時性的要求使得Linux系統(tǒng)要讓位于更多的實時操作系統(tǒng)。
本文介紹了一種基于ARM920T現(xiàn)場總線的控制系統(tǒng),詳細說明了其上擴展CAN總線的兩種方式,并給出具體的CAN模塊在實時操作系統(tǒng)eCos 上驅(qū)動程序開發(fā)的步驟,最后對兩種擴展進行了簡要的比較。
2、現(xiàn)場總線控制系統(tǒng)簡介
該現(xiàn)場總線控制系統(tǒng)采用EP9315為核心處理器。EP9315是Cirrus Logic公司開發(fā)的一款基于ARM920T的工業(yè)級處理器。該現(xiàn)場總線控制系統(tǒng)除了外擴的CAN總線接口、還外擴64Mb SDRAM和32MB FLASH、并帶有PCMCIA 接口、E PROM接口、512kb SRAM、IDE接口、實時時鐘、視頻顯示、彩色VGA TFT LCD觸摸屏、支持模擬VGA連接、視頻解碼支持壓縮視頻輸出和S-VIDEO輸出、PS/2鍵盤,三個USB接口、三個串行接口、音頻接口、1/10/100Mbps以太網(wǎng)接口、紅外線接收口;實現(xiàn)了控制系統(tǒng)的數(shù)字化、智能化;可實現(xiàn)多種功能,使系統(tǒng)的控制功能本地化,提高了系統(tǒng)的可靠性、實時性;簡化了系統(tǒng)的結(jié)構(gòu)。多接口的系統(tǒng)結(jié)構(gòu)使系統(tǒng)的擴展,變更,拆裝更加靈活便利。
3、硬件系統(tǒng)擴展
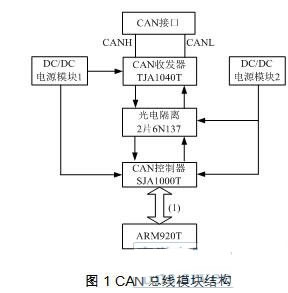
3.1 CAN總線模塊結(jié)構(gòu)
本文使用SJA1000T作為CAN控制器擴展CAN模塊 。SJA1000T是使用于汽車和一般工業(yè)環(huán)境的獨立CAN總線控制器,具有完成CAN高性能通信協(xié)議所要求的全部必要特性;具有簡單總線連接的SJA1000T可完成物理層和數(shù)據(jù)鏈路層的所有功能。支持CAN2.0協(xié)議。
CAN總線收發(fā)器TJA1040T是CAN控制器和物理總線之間的接口芯片,增強了總線的驅(qū)動能力,從而增加CAN總線的通信距離并使得一條總線上可以掛更多的節(jié)點。
為增強CAN總線節(jié)點的抗干擾能力 ,SJA1000T的TXO和RXO并不直接與TJA1040的TXD和RXD相連,而是通過兩片光耦隔離芯片6N137與TJA1040T相連。很好地實現(xiàn)了收發(fā)器與控制器之間的電氣隔離,保護智能節(jié)點核心電路安全工作;并實現(xiàn)了總線上各CAN節(jié)點間的電氣隔離。需要強調(diào)的是:為實現(xiàn)這種電氣隔離,光耦器件兩側(cè)的直流電源必須是兩個無直接電氣聯(lián)系、相互隔離的直流電源。因而采用兩路DC-DC隔離電源實現(xiàn)。為進一步加強安全性和抗干擾能力,可在總線收發(fā)器TJA1040T與CAN總線間串接限流電阻,避免TJA1040T受過流沖擊。同時,在CANH和CANL,與地之間并聯(lián)了濾波電容,可以起到濾除總線上的高頻干擾,并具備一定的防電磁輻射能力。此外,通信信號在線路上傳輸時,信號傳輸?shù)綄?dǎo)線的端點時會發(fā)生反射,反射信號會干擾正常信號的傳輸。為消除這種影響,可在CAN總線兩端并接匹配電阻,起到匹配總線阻抗和消除反射的雙重作用。若忽略這些措施,會使數(shù)據(jù)通信的抗干擾性和可靠性大大降低,甚至無法通信。
3.2 CAN模塊與ARM9的兩種連接方式
SJA1000T數(shù)據(jù)地址總線復(fù)用,而整個ARM9系列包括ARM920T數(shù)據(jù)和地址總線分開。這就使得它與ARM9系列的連接不能像傳統(tǒng)的用于51單片機系列方式擴展連接,本文給出兩種擴展方式 :全部IO口連接方式和最少IO口的數(shù)據(jù)信號線連接方式。
3.2.1 IO接口連接
微處理器的通用IO口可以提供一個簡便的方法來控制SJA100T。EP9315的GPIO信號提供了很大的靈活度來滿足SJA1000T時間上的要求。將SJA1000T數(shù)據(jù)地址復(fù)用總線全部與EP9315的通用IO接口連接。其它信號線WR、RD、ALE……也與IO接口連接。具體連接方式參考圖2。

3.2.2 數(shù)據(jù)信號線連接
除了全部由IO端口來控制CAN模塊,還可利用ARM9的數(shù)據(jù)線和信號線來實現(xiàn)CAN模塊的擴展。連接電路如圖3所示,凡SJA1000T以外的信號均為EP9315芯片上的信號管腳,SJA1000T數(shù)據(jù)地址復(fù)用總線與EP9315數(shù)據(jù)線相連,GPIOx、GPIOy、GPIOz可以是EP9315任意GPIO引腳,但選擇同一個通道的GPIO口將使編程更容易。注意SJA100T的INT可以連接CPU的INT也可以連接到帶有中斷的通用IO上。在EP9315中,GPIO的通道A,B,F(xiàn)有中斷功能。

圖2和圖3是示意圖,具體的由于EP9315信號高電平為3.3V,而SJA1000T高電平為5V,故需要通過74LVC245這類電平匹配芯片進行電平匹配后再連接。
4、驅(qū)動開發(fā)
由于現(xiàn)場總線控制系統(tǒng)在許多場合具有實時性的要求,本現(xiàn)場總線控制系統(tǒng)采用實時性高的eCos作為操作系統(tǒng),CAN驅(qū)動程序也在eCos操作系統(tǒng) 上進行擴展。
對eCos系統(tǒng)的設(shè)備驅(qū)動程序的設(shè)計主要圍繞著DEVTAB_ENTRY和DEVIO_TAB進行,添加新設(shè)備的工作就是對這兩個表項的各個域進行實現(xiàn),并且編寫與硬件相關(guān)的底層函數(shù)。通過對驅(qū)動程序結(jié)構(gòu)層次的剖析,CAN總線驅(qū)動的開發(fā)分為四步:
第一步:向內(nèi)核注冊新設(shè)備;
第二步:開發(fā)驅(qū)動程序基本IO函數(shù);
第三步:實現(xiàn)中斷處理函數(shù);
第四步:綁定設(shè)備中斷并進行驗證。
具體實現(xiàn)過程如下:
4.1 向內(nèi)核注冊新設(shè)備
在向內(nèi)核注冊新設(shè)備時,原有的驅(qū)動程序中和硬件無關(guān)的部分仍然可以使用,例如設(shè)備I/O函數(shù)表,硬件相關(guān)的部分需要自行設(shè)計,包括設(shè)備描述符、設(shè)備名、設(shè)備初始化程序init、查找程序lookup和拓展CAN總線的數(shù)據(jù)結(jié)構(gòu)。
拓展CAN總線的數(shù)據(jù)結(jié)構(gòu)Can_bus時一組用于描述對設(shè)備進行的全部操作的數(shù)據(jù)結(jié)構(gòu)。通過宏Can_bus產(chǎn)生can總線的數(shù)據(jù)結(jié)構(gòu),宏Can_bus的原型為:
Can_bus(1,funs,modereg,intrenreg,bustime,outpctr,clkdiv,acptcode,acptmask,flag)
參數(shù)說明如下:
l-該數(shù)據(jù)結(jié)構(gòu)的語言標識符
funs接口函數(shù)組,即硬件接口函數(shù)。
flags驅(qū)動程序初始表示值。
modereg工作模式初始值
intrenreg中斷允許初始值
bustime總線時鐘1,和總線時鐘2初始值
outpctr輸出控制
clkdiv分時
acptcode驗收代碼
acptmask驗收屏蔽
在產(chǎn)生CAN總線的設(shè)備表入口時首先要創(chuàng)建can總線的數(shù)據(jù)對象Can_bus,并且初始化以上所有參數(shù)。拓展CAN總線的Can_bus數(shù)據(jù)對象標識符為EP9315_can_bus。
拓展CAN總線的設(shè)備表入口對象實現(xiàn)如下:
DEVTAB_ENTRY(EP9315_can_io0,
CYGDAT_IO_CAN_EP9315_CAN0_NAME,
0,
&cyg_io_can_devio,
EP9315_can_init, //拓展CAN的初始化函數(shù)
EP9315_can_lookup, //拓展CAN的查找函數(shù)
&EP9315_can_bus //CAN數(shù)據(jù)結(jié)構(gòu)Can_bus
);
4.2 開發(fā)驅(qū)動程序基本IO函數(shù)
這部分函數(shù)指的是驅(qū)動程序接口函數(shù)中與硬件相關(guān)的部分,也就是Can_bus數(shù)據(jù)結(jié)構(gòu)中的funs接口函數(shù)表。funs函數(shù)表通過以下宏進行定義:
CAN_FUNS(l,putc,getc,set_config,start_xmit,stop_xmit)
參數(shù)說明如下:
l是該funs函數(shù)表的C語言標實符。
putc函數(shù):bool (*putc)(can_bus *priv,unsigned char c)該函數(shù)發(fā)送一個字符到串口。如果發(fā)送成功,則返回true,否則返回false。
getc函數(shù):unsigned char (*getc)(can_bus *priv)該函數(shù)從設(shè)備接口讀取一個字符,它只用于非中斷方式,通過查詢設(shè)備是否處于準備(ready)狀態(tài)來等待一個字符。
set_config函數(shù):bool (*set_config)(can_bus *priv,cyg_can_info_t *config)該函數(shù)用于對指定的端口配置。如果對硬件配置成功,則返回true;如果端口不支持給定的配置參數(shù),則返回false。
start_xmit函數(shù):void (*start_xmit)can_bus *priv)在中斷方式下,該函數(shù)使能發(fā)送端,允許發(fā)送中斷的產(chǎn)生。
stop_xmit函數(shù):void (*stop_xmit)(can_bus *priv)在中斷方式下,當數(shù)據(jù)發(fā)送結(jié)束后,該函數(shù)進制發(fā)送端,進制發(fā)送中斷產(chǎn)生。
start_recv函數(shù):void (*stop_xmit)(can_bus *priv)
stop_recv函數(shù):void (*stop_xmit)(can_bus *priv)
4.3 發(fā)送中斷處理函數(shù)
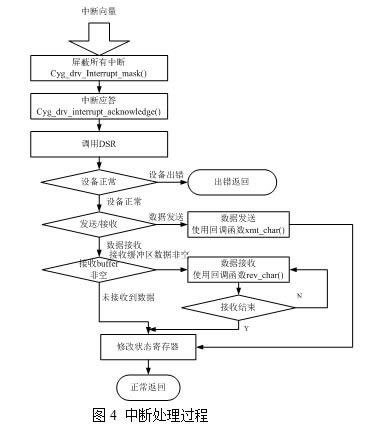
CAN總線在中斷方式下的負責(zé)對中斷進行處理函數(shù)是中斷服務(wù)程序ISR和中斷滯后服務(wù)程序DSR。對中斷的處理主要有三種模式,第一種模式是在中斷服務(wù)程序ISR內(nèi)完成所有設(shè)備處理工作,第二種是在中斷滯后服務(wù)程序DSR內(nèi)實現(xiàn),第三中是將對設(shè)備的處理推遲到中斷線程內(nèi)進行。在驅(qū)動程序的設(shè)計中采用的是第二種模式。
在這種模式中,中斷處理程序ISR只是簡單的通過對設(shè)備進行編程或者直接調(diào)用cyg_drv_interrupt_mask()函數(shù)防止新中斷的產(chǎn)生,然后將調(diào)用DSR作進一步的處理。DSR完成大部分的硬件處理工作,并有可能對某個條件變量產(chǎn)生一個信號來喚醒新的中斷。最后,DSR調(diào)用cyg_drv_interrupt_unmask(),重新使能中斷。中斷處理過程如圖所示:
4.4 綁定設(shè)備中斷
設(shè)備驅(qū)動程序的初始化函數(shù)在系統(tǒng)初始化過程或者設(shè)備初始使用時被調(diào)用,初始化函數(shù)不僅要設(shè)置設(shè)備的參數(shù),還要為設(shè)備分配相應(yīng)的數(shù)據(jù)結(jié)構(gòu):例如輸入輸出緩沖區(qū)等,最后還將設(shè)備中斷進行綁定。
每一個設(shè)備在初始化時會產(chǎn)生一個對應(yīng)的中斷對象,所有的中斷對象存儲在系統(tǒng)的中斷向量鏈表中。當某個中斷發(fā)生時,系統(tǒng)根據(jù)中斷碼到中斷向量鏈表中尋找相應(yīng)的中斷對象,再跳轉(zhuǎn)到中斷對象記錄的中斷處理程序的位置執(zhí)行。
宏cyg_drv_interrupt_create(vector,priority,data,isr,dsr,handle,intr)用于產(chǎn)生設(shè)備的中斷對象。其中,vector是中斷向量,priority中斷優(yōu)先級,data是數(shù)據(jù)指針,isr是中斷處理程序ISR的地址,dsr是中斷滯后處理程序DSR的地址,handle是返回句柄,intr是中斷對象存放的位置。
宏cyg_drv_interrupt_attach(interrupt)用于將中斷向量加入到中斷向量鏈表。參數(shù)interrupt是將要連接的中斷的句柄。
設(shè)備中斷綁定后,當設(shè)備產(chǎn)生中斷時系統(tǒng)會找到相應(yīng)的中斷向量,然后把控制權(quán)交給中斷處理程序,進行中斷的處理。
5、兩種擴展方式比較
對于兩種不同的CAN與ARM9連接方式,IO口連接直觀簡單;而利用數(shù)據(jù)信號線連接能節(jié)省IO口,給CPU更多開發(fā)空間。兩者在驅(qū)動程序上差異不大,主要體現(xiàn)在底層數(shù)據(jù)讀寫時序?qū)崿F(xiàn)上。前者簡單易于編寫和理解,后者只是在對時序的理解上略有難度,并不會使代碼更加冗長。
6、結(jié)束語
本文通過在現(xiàn)場總線控制系統(tǒng)上擴展CAN總線模塊,詳細講解了如何在ARM9上擴展CAN總線模塊,給出了全IO口擴展和利用數(shù)據(jù)信號線擴展兩種方式;并詳細說明如何在高實時性操作系統(tǒng)eCos上開發(fā)CAN驅(qū)動程序;最后對兩種擴展方式做了簡單的比較。該現(xiàn)場總線控制系統(tǒng)在國家十一五某國防項目中得到了很好的應(yīng)用。同時也為大中型國有企業(yè)自動化生產(chǎn)線的建設(shè)和改造,電力系統(tǒng)自動化的實現(xiàn)提供很好的借鑒。
參考文獻
[1] 史久根等. CAN現(xiàn)場總線系統(tǒng)設(shè)計技術(shù)[M]. 北京:國防工業(yè)出版社,2004.
[2] 鄔寬明. CAN總線原理和應(yīng)用系統(tǒng)設(shè)計[M]. 北京:北京航空航天大學(xué)出版社,1995.
[3] 王京起等. 嵌入是可配置實時操作系統(tǒng)eCos技術(shù)及實現(xiàn)機制[M] . 北京:電子工業(yè)出版社,2005.
[4] 張紹忠,王輝. 基于SJA1000的CAN總線智能節(jié)點實現(xiàn)[J].電子技術(shù)應(yīng)用,2006(8):22-25.
[5] 王松月,楊福興. 基于ARM920T嵌人式通信控制系統(tǒng)設(shè)備驅(qū)動開發(fā)[J].電力自動化設(shè)備, 2006.26(6):75-78.WANG Song-yue, YANG Fu-xing,Driver development for embedded communication control system based on ARM920T[J]. Electric power Automation Equipment,2006,26(6):75-78.
[6] Freund L, Dupont D, Israel M, Rousseau F. Overview of the ECOS project[J]. Rapid System Prototyping, 1997’Shortening the Path from Specification to Prototype’. Proceedings, 8th IEEE International Workshop on 24-26, 1997.6:39-43.
[7] Anthony J. Massa. Embedded Software Development with eCos[J]. PRENTICE HALL, Publishing as Prentice Hall Professional Technical Reference, 2003, 7-10, 315-322.
[8] How to Connect NAND Flash Memory to an EP93xx[J]. http://www.cirrus.com. 2005.2.