
本課題來(lái)源于一個(gè)無(wú)紙記錄儀的項(xiàng)目。在該項(xiàng)目中要求無(wú)紙記錄儀中有一路通道將工業(yè)現(xiàn)場(chǎng)采集到的頻率信號(hào)測(cè)量并顯示出來(lái)。傳統(tǒng)的 測(cè)頻系統(tǒng)大多采用單片機(jī)加邏輯器件構(gòu)成,而這類測(cè)頻系統(tǒng)存在測(cè)頻速度慢、準(zhǔn)確度低、可靠性差的缺點(diǎn),故而使測(cè)量?jī)x表達(dá)不到工業(yè)現(xiàn)場(chǎng)的要求。鑒于此,本文設(shè) 計(jì)了一種基于嵌入式微處理器SEP 3203和FPGA的測(cè)頻系統(tǒng)。將嵌入式微處理器靈活的控制功能與FPGA的設(shè)計(jì)靈活、高速和高可靠性的特點(diǎn)有機(jī)結(jié)合,從而達(dá)到工業(yè)現(xiàn)場(chǎng)的實(shí)時(shí)測(cè)量要求, 而且該測(cè)頻系統(tǒng)具有可重構(gòu)性。
2 測(cè)頻原理
常用的直接測(cè)頻方法主要有測(cè)頻法和測(cè)周期法2種。測(cè)頻法就是在確定的閘門(mén)時(shí)間 tw內(nèi),記錄被測(cè)信號(hào)的變化周期數(shù)(或脈沖個(gè)數(shù))Nχ,被測(cè)信號(hào)的頻率為fχ=Nχ/tw。測(cè)周期法需要有標(biāo)準(zhǔn)信號(hào)的頻率fs,在待測(cè)信號(hào)的一個(gè)周期內(nèi) tχ,記錄標(biāo)準(zhǔn)頻率的周期數(shù)Ns,被測(cè)信號(hào)的頻率為fχ=fs/Ns。這2種方法的計(jì)數(shù)值會(huì)產(chǎn)生±1個(gè)字的誤差,并且測(cè)試精度與計(jì)數(shù)器中記錄的數(shù)值Nχ或 Ns有關(guān)。為了保證測(cè)試精度,一般對(duì)于低頻信號(hào)采用測(cè)周期法,對(duì)于高頻信號(hào)采用測(cè)頻法,這樣測(cè)試時(shí)很不方便,所以人們提出了等精度測(cè)頻的方法。
等精度測(cè)頻方法是在直接測(cè)頻方法的基礎(chǔ)上發(fā)展起來(lái)的,他的閘門(mén)時(shí)間不是固定的值,而是被測(cè)信號(hào)周期的整數(shù)倍,即與被測(cè)信號(hào)同步,消除了對(duì)被測(cè)信號(hào)計(jì)數(shù)所產(chǎn)生±1個(gè)字的誤差,達(dá)到了在整個(gè)測(cè)試頻段內(nèi)保持等精度測(cè)量。其測(cè)頻原理如圖1所示。
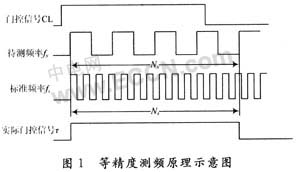
在 測(cè)量過(guò)程中,有2個(gè)計(jì)數(shù)器分別對(duì)標(biāo)準(zhǔn)信號(hào)和被測(cè)信號(hào)同時(shí)計(jì)數(shù)。首先給出閘門(mén)開(kāi)啟信號(hào)(預(yù)置閘門(mén)上升沿),此時(shí)計(jì)數(shù)器并不開(kāi)始計(jì)數(shù),而是等到被測(cè)信號(hào)的上升 沿到來(lái)時(shí),計(jì)數(shù)器才真正開(kāi)始計(jì)數(shù)。然后預(yù)置閘門(mén)關(guān)閉信號(hào)(下降沿)到時(shí),計(jì)數(shù)器并不立即停止計(jì)數(shù),而是等到被測(cè)信號(hào)的上升沿到來(lái)時(shí)才結(jié)束計(jì)數(shù),完成1次測(cè) 量過(guò)程。從而實(shí)現(xiàn)了實(shí)際門(mén)控信號(hào)與被測(cè)信號(hào)的同步,進(jìn)而消除對(duì)被測(cè)信號(hào)計(jì)數(shù)產(chǎn)生的一個(gè)脈沖的誤差。
設(shè)在1次實(shí)際閘門(mén)時(shí)間τ中計(jì)數(shù)器對(duì)被測(cè)信號(hào)的計(jì)數(shù)值為Nχ,對(duì)標(biāo)準(zhǔn)信號(hào)的計(jì)數(shù)值為Ns。標(biāo)準(zhǔn)信號(hào)的頻率為fs,則被測(cè)信號(hào)的頻率為:
fχ=(Nχ/Ns)×fs (1)
3 誤差分析
由式(1)可知,若忽略標(biāo)頻的誤差,則等精度測(cè)頻可能產(chǎn)生的相對(duì)誤差為:
δ=(fχ-fe/fe)×100% (2)
其中,fe為被測(cè)信號(hào)頻率的準(zhǔn)確值。在測(cè)量中,由于fχ計(jì)數(shù)的起停時(shí)間都是由該信號(hào)的上升沿觸發(fā)的,在閘門(mén)時(shí)間τ內(nèi)對(duì)fχ的計(jì)數(shù)Nχ無(wú)誤差(τ=Nχtχ);對(duì)fs的計(jì)數(shù)Ns最多相差1個(gè)數(shù)的誤差,即│△Ns│≤1,其測(cè)量頻率為:
fe=[Nχ/(Ns+△Ns)]/fs (3)
將式(1)和式(3)代入式(2),并整理得:
δ=│△Ns│/Ns≤1/Ns-1/(τ×fs) (4)
由 上式可以看出:測(cè)量頻率的相對(duì)誤差與被測(cè)信號(hào)頻率的大小無(wú)關(guān),僅與閘門(mén)時(shí)間和標(biāo)準(zhǔn)信號(hào)頻率有關(guān),即實(shí)現(xiàn)了整個(gè)測(cè)試頻段的等精度測(cè)量。閘門(mén)時(shí)間越長(zhǎng),標(biāo)準(zhǔn)頻 率越高,測(cè)頻的相對(duì)誤差就越小。標(biāo)準(zhǔn)頻率可由穩(wěn)定度好、精度高的高頻晶體振蕩器產(chǎn)生,在保證測(cè)量精度不變的前提下,提高標(biāo)準(zhǔn)信號(hào)頻率,可使閘門(mén)時(shí)間縮短, 即提高測(cè)試速度。
4設(shè)計(jì)框圖及實(shí)現(xiàn)
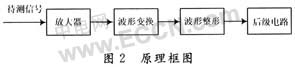
(1)前級(jí)電路
即首先對(duì)待測(cè)信號(hào)進(jìn)行處理使其達(dá)到與后級(jí)電路相兼容的脈沖信號(hào)。原理框圖如圖2所示。具體實(shí)現(xiàn)電路如圖3所示。
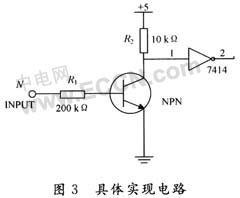
第 一級(jí)電路是由開(kāi)關(guān)三極管組成的零偏置放大電路,以保證放大電路具有良好的高頻響應(yīng),當(dāng)輸入信號(hào)為零或負(fù)電壓時(shí),三極管工作在截止?fàn)顟B(tài),輸出為高電平,當(dāng)輸 入為正電壓時(shí),三極管工作在飽和狀態(tài)(導(dǎo)通),輸出電壓隨輸入電壓上升而下降。零偏置放大電路把如正弦波樣的正負(fù)交替波形變換成單向脈沖,這使得該電路可 以測(cè)量任意方波信號(hào)、正弦波信號(hào)、鋸齒波信號(hào)、三角波信號(hào)等頻率。
第二級(jí)采用的是施密特非門(mén)觸發(fā)器CC74HC14,是對(duì)放大器輸出的信號(hào)進(jìn)行整形,使其輸出的信號(hào)成為與后級(jí)電路相兼容的脈沖信號(hào)。
(2)后級(jí)電路
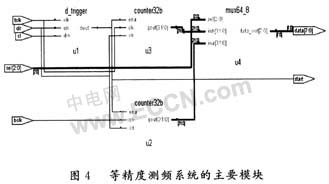
圖4為測(cè)頻系統(tǒng)的主要模塊。圖4中各模塊用硬件描述語(yǔ)言Verilog HDL描述,通過(guò)EDA工具(ModelSim,Synplify,QuartusⅡ)進(jìn)行編譯、仿真、延時(shí)分析、管腳調(diào)整、綜合等步驟,最后燒錄到FPGA芯片中。將芯片與被測(cè)信號(hào)的放大整形模塊等外圍電路相連接,通過(guò)調(diào)試便完成了整個(gè)設(shè)計(jì)。
工作過(guò)程表示如下:
d_trigger 實(shí)體實(shí)現(xiàn)門(mén)控信號(hào)和被測(cè)信號(hào)TCLK同步控制功能,內(nèi)部有一個(gè)受被測(cè)信號(hào)TCLK上升沿同步的D觸發(fā)器和預(yù)置門(mén)控信號(hào)CL共同作用產(chǎn)生實(shí)際的門(mén)控信號(hào)。 counter32b1和counter32b2分別對(duì)標(biāo)準(zhǔn)頻率BCLK和被測(cè)頻率TCLK計(jì)數(shù),內(nèi)部為帶異步復(fù)位的32位二進(jìn)制計(jì)數(shù)器的時(shí)序進(jìn)程。 mux64_8是數(shù)據(jù)選擇器,根據(jù)地址信號(hào)se1不同取值,64位數(shù)據(jù)依次從data_out[7:0]端輸出。
即當(dāng)CLR為1,D觸發(fā) 器及兩個(gè)計(jì)數(shù)器清零。當(dāng)預(yù)置門(mén)控信號(hào)CL為1時(shí),及經(jīng)放大整形后的被測(cè)信號(hào)TCLK上升沿到來(lái)時(shí),同步電路輸出dout=1,帶使能端的2個(gè)計(jì)數(shù)器開(kāi)始計(jì) 數(shù);當(dāng)預(yù)置門(mén)控信號(hào)CL為0時(shí),被測(cè)信號(hào)TCLK下一個(gè)上升沿到來(lái)時(shí),同步電路輸出dout=0,即ena1=ena2=0,2個(gè)計(jì)數(shù)器停止計(jì)數(shù)。然后根 據(jù)地址信號(hào)se1不同取值,64位數(shù)據(jù)依次從data_out[7:0]端輸出送入后端的乘法器和除法器模塊,按公式計(jì)算出被測(cè)頻率的值。
(3)嵌入式微處理器讀取測(cè)頻結(jié)果
本系統(tǒng)采用東南大學(xué)國(guó)家集成電路工程中心自主研發(fā)的嵌入式微處理器SEP 3203,并通過(guò)JTAG仿真器連接到PC機(jī)上的集成調(diào)試環(huán)境(IDE)軟件平臺(tái),在IDE中統(tǒng)一完成C語(yǔ)言的編輯、編譯、連接。IDE選擇了ARM公司的開(kāi)發(fā)軟件ADS 1.2,利用處理機(jī)的Embedded-ICE性能,通過(guò)JTAG接口實(shí)現(xiàn)實(shí)時(shí)的仿真調(diào)試。整個(gè)系統(tǒng)具有高性能、低功耗、低成本的特點(diǎn)。本系統(tǒng)的平臺(tái)結(jié)構(gòu)如圖5所示: 
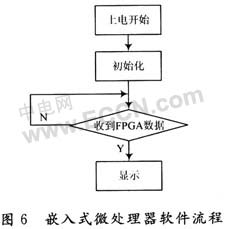
FPGA與嵌入式微處理器SEP 3203之間采用總線的方式進(jìn)行數(shù)據(jù)交換,也就是將FPGA看作總線上的一個(gè)并行外部設(shè)備。FPGA通過(guò)一個(gè)SRAM接口與嵌入式微處理器SEP 3203相通信。即從嵌入式微處理器SEF'3203的角度來(lái)看,F(xiàn)PGA與嵌入式微處理器SEP3203之間的通信就相當(dāng)于SEP 3203與一個(gè)SRAM之間的通信。在程序中讀寫(xiě)指定區(qū)域的地址,可以實(shí)現(xiàn)對(duì)FPGA的讀寫(xiě)操作。嵌入式微處理器的軟件流程圖如圖6所示:
處 理器SEP 3203的外部存儲(chǔ)器接口(EMI)提供了6個(gè)可配置的片選信號(hào):CSA,CSB,CSC,CSD,CSE,CSF,用來(lái)實(shí)現(xiàn)對(duì)ROM,SRAM,NOR FLASH的片選。其中CSE,CSF、可以配置成SDRAM片選信號(hào)。FPGA模塊使用的是CSB片選信號(hào)。CSB片選的默認(rèn)地址范圍為 0x24000000~0x27FFFFFF,即FPGA組成的外設(shè)映射在SEP3203的地址空間為0x24000000~0x27FFFFFF,所以 SEP3203在訪問(wèn)FPGA時(shí)只需讀寫(xiě)該地址空間中的任何一個(gè)地址,SEP3203能自動(dòng)產(chǎn)生相應(yīng)的總線操作,從而讀取到FPGA的測(cè)頻結(jié)果。
5 仿真及驗(yàn)證
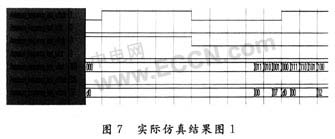
取fs=1 MHz為例,實(shí)際仿真的結(jié)果如圖7,圖8所示,由此驗(yàn)證了等精度測(cè)頻的高精確度。
例1:標(biāo)準(zhǔn)頻率Fs為1 MHz;待測(cè)頻率Fχ為1 kHz。
由圖7看出Ns=0x7DOH=2 000;Nχ=0x2H=2,故測(cè)得頻率Fχ=(N=/Ns)*Fχ=1 kHz。
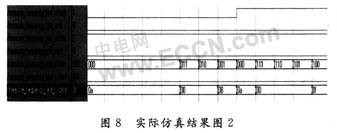
例2:標(biāo)準(zhǔn)頻率Fs為1 MHz;待測(cè)頻率Fχ為7.288 kHz。
由圖8看出Ns=0x80AH=2 058;Nχ=0xFH=15,故測(cè)得頻率Fχ=(Nχ/Ns)*Fs=7 288.630 Hz。
采用等精度頻率測(cè)量方法測(cè)量精度保持恒定,不隨所測(cè)信號(hào)的變化而變化,再結(jié)合FPGA集成度高、高速和高可靠性的特點(diǎn),使頻率的測(cè)頻范圍可達(dá)到0.1~1×10 8Hz,測(cè)頻全域的相對(duì)誤差恒定。
6 結(jié) 語(yǔ)
本測(cè)頻系統(tǒng)將嵌入式微處理器靈活的控制功能與FPGA器件的結(jié)合,突破了傳統(tǒng)電子系統(tǒng)的設(shè)計(jì)模式,使系統(tǒng)開(kāi)發(fā)速度快、成本低、系統(tǒng)性能大幅度提高。因此,在目前的電子設(shè)計(jì)中,充分利用嵌入式微處理器+FPGA結(jié)構(gòu)將起到事半功倍的效果。
1 引 言