
近年來以微電子學(xué)和計(jì)算機(jī)技術(shù)為基礎(chǔ)的信息技術(shù)飛速發(fā)展,超聲無損檢測儀器也得到了前所未有的發(fā)展動力,為了提高檢測的可靠性和提高檢測效率,研制數(shù)字化、智能化、自動化、圖像化的超聲儀是當(dāng)今無損檢測領(lǐng)域發(fā)展的一個重要趨勢。而傳統(tǒng)的超聲波檢測儀存在準(zhǔn)確性差、精度低、體積大、功耗大、人機(jī)界面不友好等問題。而超聲波發(fā)射與控制電路正是在一種基于ARM的超聲波檢測系統(tǒng)的基礎(chǔ)上,以ARM微控制器為核心,使用C語言編程,方便地實(shí)現(xiàn)了發(fā)射頻率與激勵電壓脈沖幅度的調(diào)節(jié)。
1 超聲波檢測系統(tǒng)的總體設(shè)計(jì)結(jié)構(gòu)
基于ARM超聲波檢測系統(tǒng)的總體結(jié)構(gòu)框圖,如圖1所示。該系統(tǒng)主要由3部分組成:超聲波前端發(fā)射接收電路、DSP和ARM處理器。
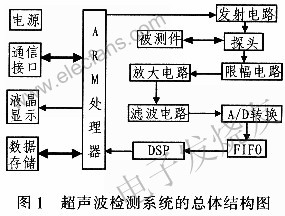
超聲波前端發(fā)射電路負(fù)責(zé)產(chǎn)生激勵脈沖電壓和重復(fù)頻率可調(diào)的超聲波。接收電路首先將反射回來的微弱信號經(jīng)放大、濾波等電路處理,然后通過A/D轉(zhuǎn)換電路對信號進(jìn)行采集并將采集的信號經(jīng)數(shù)據(jù)緩沖FIF0送入DSP。
DSP接收由A/D轉(zhuǎn)換器經(jīng)FIF0緩沖后的數(shù)據(jù),主要完成計(jì)算結(jié)構(gòu)復(fù)雜的信號處理算法,提高超聲探傷儀器的精度和數(shù)據(jù)處理能力。
ARM處理器主要完成兩部分功能:一是控制功能,調(diào)節(jié)激勵脈沖的寬度和重復(fù)頻率以及放大電路的放大倍數(shù);二是實(shí)現(xiàn)信號的實(shí)時顯示、存儲以及和外部的通信等功能。ARM微處理器采用基于ARM920T的16/32位RISC微處理器S3C2440A。其內(nèi)核頻率最高為400 MHz,功耗低,體積小,集成外設(shè)多,數(shù)據(jù)處理能力好,因而可廣泛應(yīng)用于手持設(shè)備等。
2 超聲波發(fā)射電路
根據(jù)被測件的材料、厚度等不同條件,所需的相應(yīng)超聲波探頭的頻率、發(fā)射電壓也不同。發(fā)射的超聲波頻率一般為幾MHz,高壓激勵脈沖一般為幾十到幾百伏,脈沖的上升時間不超過100 ns。根據(jù)頻譜分析,激勵脈沖寬度探頭頻率之間存在著最佳關(guān)系式,當(dāng)脈沖寬度滿足這一關(guān)系式時,接收探頭的接收信號質(zhì)量最好。該關(guān)系式即為:

式中,f0為探頭頻率,2a為脈沖寬度。本設(shè)計(jì)所選探頭頻率為2.5 MHz,由式(1)確定的脈沖寬度為600 ns,所以放電時間應(yīng)盡量控制在600 ns。
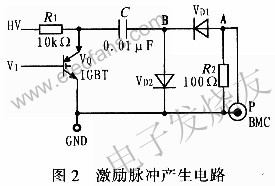
超聲波探傷法的種類很多,實(shí)際運(yùn)用中,大部分選用脈沖反射法,其發(fā)射電路多選用非調(diào)諧式,超聲波發(fā)射電路如圖2所示。電路由可調(diào)高壓電源、電阻R1和R2、能量存儲電容C、絕緣柵型雙極晶體管(IGBT)VQ、快速恢復(fù)型二極管VD1、VD2和探頭組成,設(shè)二極管等效電阻為R3,開關(guān)等效電阻為R4。ARM微處理器的PWM模塊產(chǎn)生頻率和占空比可調(diào)的脈沖,經(jīng)IGBT的驅(qū)動和保護(hù)電路后送入開關(guān)管VQ的柵極形成控制脈沖V1。當(dāng)V1為負(fù)脈沖時,IGBT關(guān)斷,高壓電源通過R1、VD2對電容C充電,充電時間常數(shù)為τ1=C(R1+R3)。當(dāng)t>5τ1時,認(rèn)為電容C充滿。當(dāng)V1為正脈沖時,IGBT開通,電容C通過開關(guān)管VQ、R2和二極管VD1對探頭放電,放電時間常數(shù)為τl=C(R2+R3+R4)。超聲波探頭收到高壓負(fù)脈沖的激勵后便產(chǎn)生一定頻率的超聲波。
電路中元件作用:
1)電阻R1用來限制充電時高壓電源對電容C的充電電流,即起到限流作用,并減小發(fā)射單元工作時對電源的影響,從這點(diǎn)考慮,要求電阻R1阻值越大越好。另一方面,電路的重復(fù)頻率f較高,為了使電容C在觸發(fā)前能充滿電,就必須滿足CR1<1/5f。所以要選擇合適的電阻R1的阻值。
2)電阻R2有2個作用:一是調(diào)節(jié)放電時間和發(fā)射功率,二是作為阻尼電阻,調(diào)節(jié)超聲脈沖寬度。R2的阻值越小,發(fā)射功率越小,發(fā)射脈沖越窄;R2阻值越大,發(fā)射功率越大,發(fā)射脈沖越寬。
3)快速恢復(fù)型二極管Vd1、Vd2濾去充電脈沖,使A點(diǎn)只有放電時的負(fù)電壓激勵脈沖。
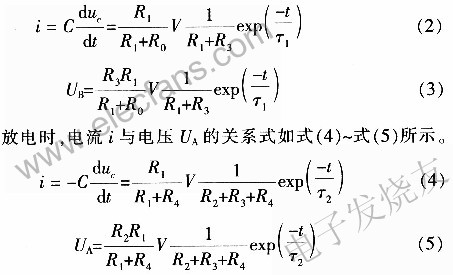
充電時,電流i與電壓UR的關(guān)系式如式(2)~式(3)所示。
所研制的電路板可激發(fā)探頭產(chǎn)生0.5~10 MHz的超聲波,激勵脈沖電壓最高可達(dá)830 V,脈沖的上升時間小于50 ns。
3 基于ARM的PWM脈沖的產(chǎn)生
ARM嵌入式處理器是具有極低功耗、極低成本的高性能處理器,運(yùn)算速度快、精度高,而且便于實(shí)時操作系統(tǒng)的移植,真正成為實(shí)時多任務(wù)系統(tǒng)。S3C2440A內(nèi)嵌PWM脈沖模塊含4通道16位定時器,占空比、頻率、極性可編程,且具有自動重載和雙緩沖功能。主頻FCLK最高達(dá)400M-Hz,APB總線設(shè)備使用的PCLK最高達(dá)68 MHz。具體過程為:首先,開啟自動重載功能,對PWM脈沖的各個參數(shù)通過PWM寄存器進(jìn)行設(shè)置,如定時器配置寄存器(TCFGn),定時器控制寄存器(TCON),定時器計(jì)數(shù)緩存寄存器(TCNTBn),定時器比較緩存寄存器(TCMPBn),定時器計(jì)數(shù)觀察計(jì)數(shù)器(TCNTOn)等的設(shè)置。其次,設(shè)置相應(yīng)定時器的手動更新位,然后設(shè)置開始位,在等待時間后定時器開始倒計(jì)數(shù),當(dāng)TCNTn和TCMPn的值相同時,TOUTn的邏輯電平由低變?yōu)楦摺.?dāng)TCNTn為0,TCNTn用TCNTBn的值自動重載。如果要重新設(shè)置TCNTn的初始值,則要執(zhí)行手動更新。
通過使用TCMPBn來執(zhí)行PWM功能,PWM的頻率由TCNTBn來決定。雙緩沖功能允許對下個PWM周期在當(dāng)前PWM周期任意時間點(diǎn)由ISR或其他程序改寫TCMPBn。
4 高壓電源及其控制
超聲波發(fā)射電路對激勵電壓脈沖要求較高,需要一定的幅值,而且脈沖寬度要求越小越好,且須有一定的發(fā)射功率,這決定了超聲波探傷的靈敏度,還關(guān)系到工件探傷的深度。如果要穿透較厚的工件,就需將較大的電功率轉(zhuǎn)換成聲功率。發(fā)射功率為:
![]()
式中,uA0為電容放電時的瞬間電壓,C為電容容量,t為放電時間,
![]()
為有效功率。
當(dāng)放電時間常數(shù)確定后,放電時間和C即確定。所以加大發(fā)射電壓是提高發(fā)射功率的主要途徑,由放電電壓公式可知,除電路中的各個電阻影響外,高壓電源的電壓是一個主要因素。但電壓又不能太高,否則會使壓電晶片加速老化。一般發(fā)射電壓不超過1 800 V。
這里采用美國Ultravoh公司的高壓電源模塊。其中“V”系列的型號為1V12-P0.4電源模塊,能完全滿足該設(shè)計(jì)的需求,其輸入電壓為12 V,輸出電壓為0~1 000 V,控制電壓為0~5 V,功率為0.4 W。低功耗、體積小、重量輕,并帶有輸出電壓監(jiān)測和自保護(hù)電路。高壓電源控制電路如圖3所示。
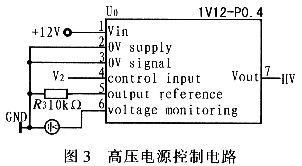
ARM微處理器輸出的控制信號經(jīng)D/A轉(zhuǎn)換后可輸出0~5 V的控制信號V2,相應(yīng)的高壓電源模塊即可輸出0~1 000 V的電壓。
5 仿真及分析
為驗(yàn)證本設(shè)計(jì)是否能滿足實(shí)驗(yàn)的需要,對電路進(jìn)行軟件仿真。因?yàn)閠=5τ1,約為500μs時認(rèn)為充電電容充滿,所以把開關(guān)頻率設(shè)置為1kH-z。仿真結(jié)果如圖4和圖5所示。
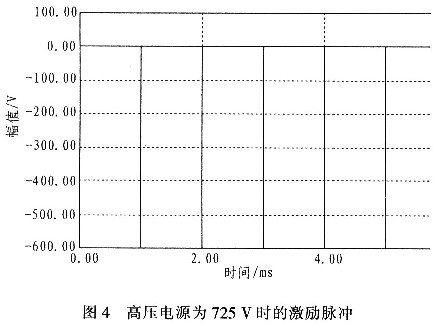
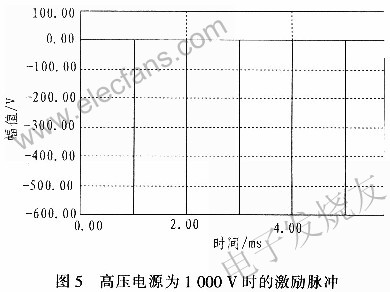
圖4中,高壓電源輸出為725V,R1=10 kΩ,R2=100 Ω,C=0.01μF,得到的激勵脈沖約為600 V,寬度為600 ns。此脈沖滿足本設(shè)計(jì)中超聲波頻率為2.5 MHz時,探頭對激勵脈沖寬度的要求。
圖5中,當(dāng)高壓電源輸出最大為1 000 V,R1=10 kΩ,R2=100 Ω,C=0.01μF時,得到的激勵脈沖約為830 V,寬度為600 ns。
由于帶充電電阻器的高壓直流電源效率不是很高,所以激勵脈沖的電壓也不能達(dá)到高壓電源的電壓。通過ARM微處理器發(fā)射不同頻率和占空比的控制脈沖,可以控制發(fā)射電路發(fā)射寬度和重復(fù)頻率可調(diào)的激勵脈沖。
6 結(jié)論
通過對發(fā)射電路工作原理以及各個元件作用的分析,得出了各個元件對超聲波所起的不同作用,以及ARM的PWM模塊如何對激勵脈沖寬度和重復(fù)頻率進(jìn)行調(diào)制。經(jīng)驗(yàn)證。該電路發(fā)射的超聲波功率、脈沖寬度和重復(fù)頻率均可調(diào)。能滿足多種檢測需求。