
作者:龍甲祿,閆劍虹
0 引言
伴隨著我國中繼衛(wèi)星系統(tǒng)的建立和發(fā)展,跟蹤與數(shù)據(jù)中繼成為當(dāng)前航天工程中的一個研究熱點,其中一個重要的研究課題是用戶星天線對中繼星的精確指向跟蹤。由于中繼衛(wèi)星系統(tǒng)對天線指向精度要求小于等于0.05°,因此衛(wèi)星在高精度姿態(tài)控制的基礎(chǔ)上,還需要增加天線跟蹤控制器對天線進(jìn)行單獨控制,才能滿足中繼衛(wèi)星系統(tǒng)中星載天線的跟蹤指向要求。
星間天線的相互跟蹤可以使用程序跟蹤方式和自動跟蹤方式,由于中繼衛(wèi)星與低軌航天器間傳輸數(shù)據(jù)速率高,天線波束寬度窄(Ka頻段)只靠程控跟蹤實現(xiàn)星間Ka頻段天線的相互跟蹤,天線指向損失較大,進(jìn)而對星間鏈路性能影響較大,所以星間天線常使用自動跟蹤模式實現(xiàn)相互跟蹤,星間天線的相互自動跟蹤主要是由自動角跟蹤系統(tǒng)來完成的。
1 天線控制系統(tǒng)的組成
1.1 天線控制系統(tǒng)的指向策略
天線伺服跟蹤系統(tǒng)組成如圖1所示。
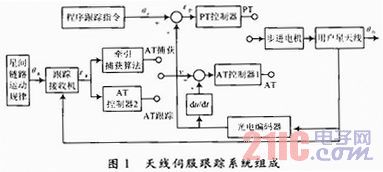
當(dāng)用戶星天線與中繼衛(wèi)星建立聯(lián)系之前,需要將衛(wèi)星單址天線指向目標(biāo)。由于初始偏差很大,衛(wèi)星根據(jù)軌道預(yù)報給出的目標(biāo)軌跡及天線當(dāng)前的位置,輸出控制命令,驅(qū)動天線轉(zhuǎn)動,從而使天線在規(guī)定的時刻指向預(yù)報的正確方向。這一過程稱為天線的程控指向模式。
由于衛(wèi)星軌道預(yù)報誤差、衛(wèi)星姿態(tài)誤差、天線機構(gòu)及控制等誤差的存在,使得天線程控指向角與真實的衛(wèi)星指向角有一定的偏差,從而造成目標(biāo)衛(wèi)星不能出現(xiàn)在跟蹤天線的半波束范圍內(nèi),也就是說,跟蹤天線未能捕獲目標(biāo)衛(wèi)星。為了捕獲目標(biāo),必須在跟蹤天線的指向附近做小范圍的掃描搜索,即用戶星的捕獲牽引模式。
當(dāng)天線指向與中繼衛(wèi)星視線之間的誤差角小于某一給定值,此時跟蹤接收機接收到的目標(biāo)信號達(dá)到某一門限值,系統(tǒng)轉(zhuǎn)入自動跟蹤模式。在自動跟蹤模式下,跟蹤接收機通過對天線饋源產(chǎn)生的和信號、差信號進(jìn)行單通道調(diào)制和基帶信號處理,完成對接收信號載波頻率的捕獲跟蹤,最后由誤差提取電路分離出方位、俯仰誤差信號,送往伺服控制單元,驅(qū)動天線向誤差減小的方向轉(zhuǎn)動,完成自動跟蹤。
在用戶星天線坐標(biāo)系內(nèi),用戶星指向中繼星的天線指向方位角和俯仰角與天線電軸夾角的關(guān)系為:

終端天線準(zhǔn)確指向中繼衛(wèi)星波束時,Ka喇叭只產(chǎn)生和模信號es,當(dāng)終端天線指向偏離中繼衛(wèi)星新標(biāo)波束時,將在Ka饋源喇叭中激勵起差模信號ed,差模信號中含有方位差信號和俯仰差信號。

1.2 跟蹤接收機
跟蹤接收機的任務(wù)就是從輸入和信號es與差信號ed中,檢測出方位誤差和俯仰誤差的電壓值。
和、差信號分別經(jīng)過低噪聲放大K∑,K△后,再對差信號進(jìn)行四相調(diào)制,然后合成一路信號:
合成信號經(jīng)過下變頻至中頻,中頻信號經(jīng)過放大,AGC調(diào)整后,對中頻信號進(jìn)行相干解調(diào),經(jīng)過檢波濾除直流分量可得:
![]()
在設(shè)備調(diào)試時,應(yīng)調(diào)整和、差信號合成前和差信道的相對相位差接近為零,即α=0,又因為△A=θcosφ,△E=θsinφ,在四相調(diào)制的一個周期內(nèi),根據(jù)β(t)的不同取值有:

該值就是系統(tǒng)完成閉環(huán)所需的方位誤差和俯仰誤差的電壓值。
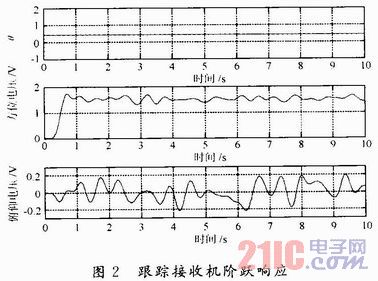
圖2為信噪比10 dB下跟蹤接收機的階躍響應(yīng)。為了便于觀察,設(shè)定θ=0.4,φ=0,則由式(1)、式(7)和式(8)可知,輸出方位誤差信號變化與θ一致,俯仰誤差信號為零。可以看出,跟蹤接收機輸出的方位、俯仰誤差信號與方位、俯仰角不是一個準(zhǔn)確的線性關(guān)系,誤差信號存在延時和干擾信息。
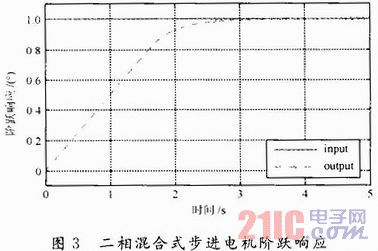
1.3 二相混合式步進(jìn)電機
混合式步進(jìn)電動機具有步距角較小,分辨率高,控制電流小,功耗低等優(yōu)點,作為控制用電動機和驅(qū)動用電動機廣泛應(yīng)用于工業(yè)領(lǐng)域。在用戶星天線跟蹤控制系統(tǒng)中,根據(jù)系統(tǒng)性能指標(biāo)和星上環(huán)境要求,選擇二相混合式步進(jìn)電機作為控制系統(tǒng)的執(zhí)行元件。
對于二相混合步進(jìn)電機,在不計定子極間和端部的漏磁,不計永磁體回路的漏磁,忽略磁滯和渦流的影響,忽略飽和的影響,忽略定子線圈自感的諧波分量,且繞組自感及繞組間互感不隨轉(zhuǎn)子機械角的變化而變化,步進(jìn)電機的數(shù)學(xué)模型可以描述為:

這里諧波減速器簡化為一個減速比為N的剛性環(huán)節(jié),并把負(fù)載轉(zhuǎn)動慣量向驅(qū)動端折算。式中,UA,UB分別表示施加在A相、B相繞組兩端的電壓;iA為A相電流,iB為B相電流;LA為A相電感,LB為B相電感;τ為變化的轉(zhuǎn)矩;p是轉(zhuǎn)子齒數(shù);ke為轉(zhuǎn)矩常數(shù);Tdm為靜態(tài)轉(zhuǎn)矩;J為轉(zhuǎn)動慣量,包括轉(zhuǎn)子轉(zhuǎn)動慣量和負(fù)載等效轉(zhuǎn)動慣量;D為粘性摩擦系數(shù);Ddθ/dt是包括風(fēng)損、機械損在內(nèi)的摩擦轉(zhuǎn)矩,它也包含磁滯渦流所致的二次電磁效應(yīng);T1為負(fù)載轉(zhuǎn)矩;θ為電機輸出角度。
為滿足天線控制系統(tǒng)高穩(wěn)定性和高可靠性的要求,選用的驅(qū)動主電路結(jié)構(gòu)是H橋電路,驅(qū)動方式為斬波恒流驅(qū)動和電流細(xì)分驅(qū)動。為了使二相混合步進(jìn)電機有恒定轉(zhuǎn)矩的輸出,需要精確控制繞組電流,在驅(qū)動電路中引入電流閉環(huán),這樣就可以實現(xiàn)精確的電流控制。電流控制器根據(jù)繞組實際電流和給定電流的差值,通過H橋?qū)崿F(xiàn)電流斬波控制,輸出繞組電壓信號。本文驅(qū)動方式采用帶有電流細(xì)分的斬波恒流驅(qū)動,給定繞組電流為:
![]()
式中:im為給定電流最大值:k為轉(zhuǎn)子步數(shù);,n為細(xì)分?jǐn)?shù)。
圖3為二相混合式步進(jìn)電機的階躍響應(yīng)。可以看出,輸出在平衡位置有輕微的抖動,這是因為步進(jìn)電機是以離散的方式運行的,所以電機的步進(jìn)角即為電機的最小前進(jìn)角度,因此可能電機無法完全運行到給定位置,造成了轉(zhuǎn)子在平衡位置來回震蕩。
2 仿真分析
根據(jù)前面的分析,在Simulink里面建立了天線控制系統(tǒng)的仿真模型,如圖4所示,控制器采用速度PID控制,當(dāng)角度偏差較大時,則轉(zhuǎn)速也隨之增大,電機以限定的最高轉(zhuǎn)速運行,使得位置偏差減小,這樣可以提高系統(tǒng)的輸出特性。控制器參數(shù)kp=1.2,kI=0.004。
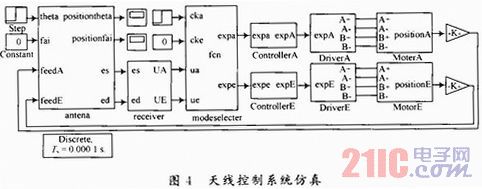
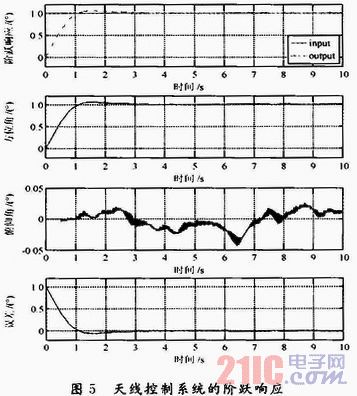
圖5為天線控制系統(tǒng)的階躍響應(yīng),可以看出,在接收機輸出信號干擾較大的情況下,天線控制系統(tǒng)能較好地跟隨目標(biāo)。方位軸角度變化與θ一致,俯仰軸角度在零值附近,天線轉(zhuǎn)動角度能跟隨給定θ,說明所建立的仿真模型能實現(xiàn)天線控制系統(tǒng)的功能。在初始角度偏差較大時,模式選擇模塊選擇程控模式,控制器作用電機以限定的最高轉(zhuǎn)速運行,使偏差快速減小。當(dāng)角度誤差小于0.4°時,牽引轉(zhuǎn)入自動跟蹤模式,控制器根據(jù)接收機輸出的方位、俯仰誤差電壓控制電機轉(zhuǎn)速增大或減小,使偏差進(jìn)一步減小,最終達(dá)到穩(wěn)定狀態(tài),穩(wěn)態(tài)時的跟蹤誤差低于0.05°。
天線控制系統(tǒng)要求跟蹤精度低于0.05°,因此給定輸入為斜坡信號,角速度為0.25(°)/s,系統(tǒng)的輸出響應(yīng)及誤差曲線如圖6所示。
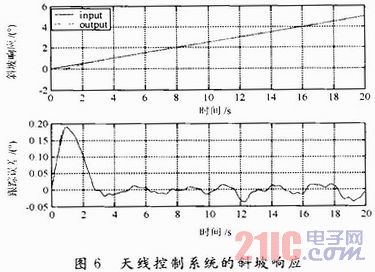
從圖6可以看出,系統(tǒng)穩(wěn)定時的跟蹤誤差低于0.05°,滿足天線控制系統(tǒng)的指向精度要求。
3 結(jié)語
在對天線控制系統(tǒng)各組成部分進(jìn)行分析的基礎(chǔ)上,在Simulink環(huán)境下完成了天線控制系統(tǒng)的仿真模型,所搭建的仿真模型能實現(xiàn)天線控制系統(tǒng)的各個功能,并能準(zhǔn)確地跟隨目標(biāo),跟蹤誤差低于0.05°,滿足天線控制系統(tǒng)的指向精度要求,證明了所設(shè)計的天線指向控制系統(tǒng)的有效性,為進(jìn)一步研究天線控制系統(tǒng)的抗干擾性能提供了基礎(chǔ)。