
FPGA技術(shù)實(shí)現(xiàn)智能導(dǎo)盲犬
摘要: 本系統(tǒng)主要解決的是盲人在出行和人際交往中遇到的問題,主要功能有:行進(jìn)中的障礙物檢測(cè)、識(shí)別與定位,其中包括移動(dòng)的物體與靜止的物體識(shí)別;測(cè)定障礙物的速度與距離;對(duì)周圍的路線的特定環(huán)境標(biāo)志進(jìn)行環(huán)境辨認(rèn),檢測(cè)出熟悉的地點(diǎn),方便盲人了解情況,并同時(shí)也以此為信息主動(dòng)控制導(dǎo)盲犬,實(shí)現(xiàn)人的主觀控制;人性化的語(yǔ)音提示,能夠根據(jù)信息重要程度主動(dòng)提示當(dāng)前情況,幫助盲人獲取必要信息,幫助盲人決策;系統(tǒng)還可以對(duì)周邊環(huán)境發(fā)生的特殊情況向家屬發(fā)送短消息,必要時(shí)可以發(fā)送圖片,實(shí)現(xiàn)進(jìn)一步的安全性。
Abstract:
Key words :
隨著信息化和數(shù)字化的發(fā)展,現(xiàn)在社會(huì)中人們的生活變得更加豐富多彩,生活更加便利。但是有一種人群卻不容忽視,社會(huì)上形形色色、豐富多彩的物是與他們無緣的,他們就是盲人。眾所周知眼晴是“心靈之窗”,而對(duì)于突然失去或從未擁有過“心靈之窗”的盲人來說,生活上的困難與心理上的痛苦是可想而知的。他們的衣食住行存在諸多不便,而在出行與人際交往中遇到的困難更加突出,基于此設(shè)計(jì)了智能導(dǎo)盲犬。生活中,導(dǎo)盲犬習(xí)慣于頸圈、導(dǎo)盲牽引帶和其他配件的約束;懂得“來”、“前進(jìn)”、“停止”等口令;可以帶領(lǐng)盲人安全地走路,當(dāng)遇到障礙和需要拐彎時(shí),會(huì)引導(dǎo)主人停下以免發(fā)生危險(xiǎn)。但是,導(dǎo)盲犬的培訓(xùn)過程長(zhǎng)達(dá)18個(gè)月,綜合費(fèi)用達(dá)2.5~3萬美元,如此昂貴的價(jià)格不是普通用戶能承擔(dān)的,所以這里設(shè)計(jì)一個(gè)智能導(dǎo)盲犬,從而為盲人帶來便利。
本系統(tǒng)主要解決的是盲人在出行和人際交往中遇到的問題,主要功能有:行進(jìn)中的障礙物檢測(cè)、識(shí)別與定位,其中包括移動(dòng)的物體與靜止的物體識(shí)別;測(cè)定障礙物的速度與距離;對(duì)周圍的路線的特定環(huán)境標(biāo)志進(jìn)行環(huán)境辨認(rèn),檢測(cè)出熟悉的地點(diǎn),方便盲人了解情況,并同時(shí)也以此為信息主動(dòng)控制導(dǎo)盲犬,實(shí)現(xiàn)人的主觀控制;人性化的語(yǔ)音提示,能夠根據(jù)信息重要程度主動(dòng)提示當(dāng)前情況,幫助盲人獲取必要信息,幫助盲人決策;系統(tǒng)還可以對(duì)周邊環(huán)境發(fā)生的特殊情況向家屬發(fā)送短消息,必要時(shí)可以發(fā)送圖片,實(shí)現(xiàn)進(jìn)一步的安全性。
1 設(shè)計(jì)結(jié)構(gòu)
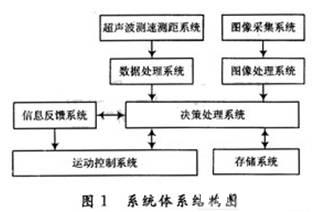
本設(shè)計(jì)系統(tǒng)通過數(shù)據(jù)采集、處理、存儲(chǔ)、反饋等子系統(tǒng)構(gòu)架而成。首先由兩路信息采集系統(tǒng)——超聲波測(cè)速測(cè)距系統(tǒng)及圖像采集系統(tǒng)采集外部環(huán)境信息,經(jīng)決策處理系統(tǒng)對(duì)信息進(jìn)行處理,并進(jìn)行多模塊輸出,其中有信息的反饋系統(tǒng)可以面向使用者提供足夠的信息提示,同時(shí),又可通過運(yùn)動(dòng)系統(tǒng)對(duì)“導(dǎo)盲犬”進(jìn)行實(shí)時(shí)控制。存儲(chǔ)系統(tǒng)可以將采集和處理的環(huán)境信息進(jìn)行存取,方便查詢。
1.1 系統(tǒng)的體系結(jié)構(gòu)
圖1為系統(tǒng)的體系結(jié)構(gòu)圖。
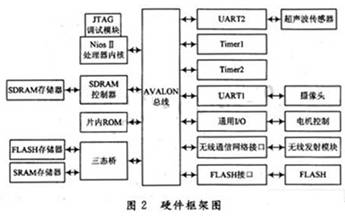
1.2 硬件設(shè)計(jì)結(jié)構(gòu)
本設(shè)計(jì)主要功能模塊有:攝像頭監(jiān)測(cè)及智能識(shí)別模塊,超聲波測(cè)速與測(cè)距模塊,電機(jī)驅(qū)動(dòng)與控制模塊,NiosⅡ處理器模塊,語(yǔ)音播報(bào)模塊,通信與定位模塊,實(shí)時(shí)存儲(chǔ)模塊,即插即用液晶顯示模塊。
硬件框架圖如圖2所示。
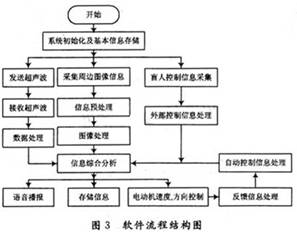
1.3 軟件流程結(jié)構(gòu)
軟件流程結(jié)構(gòu)如圖3所示。
2 具體模塊
本設(shè)計(jì)基于NiosⅡ硬件平臺(tái),運(yùn)用其強(qiáng)大的擴(kuò)展及處理功能,將數(shù)字圖像處理技術(shù)、超聲波測(cè)距定位技術(shù)、智能控制技術(shù)協(xié)調(diào)的組合在一起,構(gòu)成一個(gè)既功能強(qiáng)大又非常人性化的“導(dǎo)盲犬”。以下為各模塊的設(shè)計(jì)特點(diǎn)及方法:
2.1 Nios II處理器
Nios II處理器運(yùn)算速度快,能滿足對(duì)圖像檢測(cè)與處理的要求;具有完善的軟件開發(fā)套件,包括編譯器、集成開發(fā)環(huán)境(IDE)、JTAG調(diào)試器、實(shí)時(shí)操作系統(tǒng)(RTOS)和TCP/IP協(xié)議棧;其次,Altera DEl的外圍接口豐富,可以滿足不同的需求,必要時(shí)可以自定義外圍電路進(jìn)行擴(kuò)展。在FPGA中使用軟核處理器也是其優(yōu)勢(shì)所在,硬核實(shí)現(xiàn)沒有靈活性,通常無法使用最新的技術(shù)。基于標(biāo)準(zhǔn)處理器的方案會(huì)被淘汰,而基于NiosⅡ處理器的方案是基于HDL源碼構(gòu)建的,能夠修改以滿足新的系統(tǒng)需求。將處理器實(shí)現(xiàn)為HDL的IP核,開發(fā)者能夠完全定制CPU和外設(shè),獲得恰好滿足需求的處理器。
2.2 圖像采集模塊
利用的地貌比對(duì)是對(duì)被檢測(cè)到的環(huán)境特征在環(huán)境圖像庫(kù)中進(jìn)行目標(biāo)搜索以及進(jìn)行地點(diǎn)的確認(rèn)。實(shí)際上,將采樣到的環(huán)境圖像與庫(kù)存的圖像依次進(jìn)行比對(duì),并找出最佳的匹配對(duì)象。所以,環(huán)境的描述決定了環(huán)境識(shí)別的具體方法與性能。該應(yīng)用的核心是“圖形識(shí)別算法”,這種算法是利用了環(huán)境中的各主要特點(diǎn)及一些特征部分而形成的方法。
圖像采集系統(tǒng)主要由視頻信號(hào)A/D轉(zhuǎn)換,PFGA控制模塊,邏輯控制模塊,存儲(chǔ)模塊等組成。系統(tǒng)采集圖像的命令由計(jì)算機(jī)發(fā)出,通過Avalon總線將命令傳送至FPGA同步采集模塊。同步采集模塊則發(fā)出采集信號(hào)采集一幀圖像,利用寫信號(hào)將數(shù)據(jù)存儲(chǔ)至SRAM1中。經(jīng)過邊緣檢測(cè)處理后存儲(chǔ)到SRAM2中,將圖像信息讀出傳送給FPGA至處理。對(duì)比FPGA中環(huán)境圖片的數(shù)據(jù)庫(kù)的數(shù)據(jù)與當(dāng)前圖像數(shù)據(jù),對(duì)數(shù)字信息進(jìn)行分析,在合理誤差范圍之內(nèi),可確定特定的位置,達(dá)到環(huán)境識(shí)別的目的。
2.3 超聲波測(cè)距模塊
利用超聲波測(cè)距模塊可實(shí)現(xiàn)多障礙物的定位及運(yùn)動(dòng)狀態(tài)的跟蹤,可以精確地測(cè)出物體距離盲人的距離、物體相對(duì)于盲人的運(yùn)動(dòng)方向及運(yùn)動(dòng)速度。由于超聲波測(cè)距誤差是由超聲波的傳播速度誤差和測(cè)量距離傳播的時(shí)間誤差引起的。而超聲波的傳播速度的誤差影響最大,且其與環(huán)境的溫度有關(guān),故本設(shè)計(jì)中采用了帶溫度補(bǔ)償?shù)某暅y(cè)距,通過高精度的溫度傳感器實(shí)時(shí)跟蹤外界溫度的變換,能很好地補(bǔ)償超聲波在不同溫度的傳播速度。而傳播時(shí)間的誤差則通過NiosⅡ來消除,NiosⅡ內(nèi)部具有高頻晶振信號(hào),通過其內(nèi)部計(jì)數(shù)器計(jì)數(shù)可以滿足超聲波測(cè)距的微秒級(jí)要求,能保證測(cè)距1 cm的誤差。
2.4 電機(jī)控制模塊
本設(shè)計(jì)中用到的電機(jī)為直流電機(jī),控制著導(dǎo)盲儀的運(yùn)動(dòng),以及超聲波傳感器的循環(huán)掃描和攝像頭的動(dòng)態(tài)攝取,運(yùn)用工程整定方法,通過試驗(yàn),然后按照工程經(jīng)驗(yàn)公式對(duì)控制器參數(shù)進(jìn)行整定,由控制器輸出控制各個(gè)電機(jī)協(xié)調(diào)運(yùn)動(dòng),可以實(shí)現(xiàn)導(dǎo)盲儀的自動(dòng)運(yùn)動(dòng)及多個(gè)超聲波測(cè)量?jī)x的平面覆蓋式掃描,消除掃描中的死角。測(cè)速電路用于測(cè)量導(dǎo)盲小車的速度,反饋電路輸出控制調(diào)速系統(tǒng)可控制預(yù)先設(shè)定的速度。
2.5 短信息發(fā)送功能
能夠?qū)⒚と擞龅降那闆r的描述自動(dòng)發(fā)送給其家人。短信息的發(fā)送需要GSM模塊和FPGA處理器共同協(xié)作完成。發(fā)送中文短信采用PDU模式Unicode編碼方式,將所要發(fā)送的信息存儲(chǔ)在SIM卡中。發(fā)送過程中,F(xiàn)PGA通過發(fā)送及接收AT命令與GSM模塊形成回路,通過AT命令實(shí)現(xiàn)對(duì)GSM模塊的操作。通過簡(jiǎn)單的按鍵分配各個(gè)對(duì)應(yīng)的信息內(nèi)容,能夠使不同的信息通過短信息模塊發(fā)送。
本設(shè)計(jì)基于FPGA技術(shù)在Altera公司的DEl開發(fā)平臺(tái)進(jìn)行開發(fā),設(shè)計(jì)中需要大量進(jìn)行實(shí)時(shí)圖像處理,波形處理,以及多個(gè)進(jìn)程的并行處理,對(duì)處理器的性能要求比較高,而基于Altera NiosⅡ可以很好地滿足算法的速度和精度的雙重要求。同時(shí)豐富的IP盒可供直接使用,方便高效。在設(shè)計(jì)構(gòu)架過程中,需要將Avalon總線上各個(gè)IP的時(shí)序進(jìn)行綜合,方便FPGA處理器進(jìn)行處理,避免錯(cuò)誤和損失。同時(shí),如何提高導(dǎo)盲系統(tǒng)的魯棒性也是一個(gè)值得解決的有意義的工作。
此內(nèi)容為AET網(wǎng)站原創(chuàng),未經(jīng)授權(quán)禁止轉(zhuǎn)載。