
引言
變頻調速技術廣泛應用于工業(yè)領域。隨著電力電子控制技術及元器件的不斷發(fā)展,變頻調速系統(tǒng)的集成度、智能化程度越來越高,硬件構成也越來越緊湊、簡單。DSP(數(shù)字信號處理器)+IPM(智能功率模塊)就是變頻調速系統(tǒng)最新的發(fā)展方向之一。
在DSP+IPM構成的變頻調速系統(tǒng)中,充分利用了DSP高速運算、配置豐富及IPM控制信號接口簡單、保護完善的特點,使得系統(tǒng)元器件數(shù)大為減少、結構緊湊,而性能及可靠性卻大為提高,縮短了產(chǎn)品開發(fā)周期,提高了產(chǎn)品的競爭力。
筆者為某設備所做的一個變頻調速子系統(tǒng)就采用了DSP+IPM的結構。下面介紹該系統(tǒng)的硬件設計方法。
硬件設計
DSP和IPM
該系統(tǒng)工況為24小時連續(xù)工作制。要求受上位機控制,控制兩路電機的啟動、停止、轉速及加速度,同時將掉電及故障信號反饋給上位機。系統(tǒng)要求結構緊湊、體積小、保護功能完善、穩(wěn)定可靠。系統(tǒng)輸入電壓為3Φ 200VAC。控制的兩路電機功率分別為180W。根據(jù)以上要求,我們采用了DSP+IPM的硬件結構。
因為系統(tǒng)要求實時控制兩路電機的運行,我們選用了TI公司的專為電機控制設計的TMS320L2407A型DSP。該DSP采用了高性能靜態(tài)CMOS 技術,時鐘頻率可達40MHZ,指令周期僅為25ns,可實現(xiàn)3.3V低功耗設計,滿足實時控制要求。尤其值得一提的是該DSP具有用于電機控制的專用外圍配置―兩個事件管理模塊EVA和EVB,每個模塊包括:兩個16位通用定時器;8個16位PWM通道;三個外部事件的時間標記捕獲單元;可編程的死區(qū)時間以防止直通故障;在片位置編碼器接口電路;同步A./D轉換器等,可方便地實現(xiàn)對兩路電機的控制。另外,該型DSP還有多達40個可單獨編程的復合通用輸入/輸出引腳、多達5個外部中斷等配置,對實際應用帶來很大方便。
因為該系統(tǒng)輸入電壓為3Φ 200VAC,控制的兩路電機功率均為180W,考慮適當裕量,我們選用了三菱公司第三代DIP- IPM PS21563(10A/600V)。三菱DIP-IPM是面向AC100~200V級小容量電機變頻驅動、采用傳遞型封裝結構、將功率電路和驅動保護電路集成于一體的小型智能功率模塊,具有以下特點:
·3相AC變頻輸出電路搭載三菱第5代平面型IGBT和CSTBT(Carrier Stored Trench-gate Bipolar Transistor:具有載流子蓄積層的溝槽型門極構造雙極晶體管)功率芯片,實現(xiàn)更低損耗。
·采用自舉電路結構,可實現(xiàn)單電源驅動。
·內(nèi)置有IGBT驅動電路,具有過載保護、控制電源欠壓保護功能。P側具有UV(控制電源欠壓)保護功能,但不輸出故障信號F。N側具有UV及SC(過載)保護功能,同時輸出故障信號F。
·內(nèi)置專用HVIC(高壓600VIC),無需隔離絕緣電路(如光耦),可由DSP或3V級單片機直接驅動。
·輸入接口電路采用高電平驅動邏輯,消除了舊產(chǎn)品低電平驅動方式對電源投入和切斷時的時序要求,增強了模塊自保護能力。
系統(tǒng)輸入為3Φ 200VAC,經(jīng)三相全橋整流為約270VDC供給IPM,并由270V進行DC/DC轉換產(chǎn)生輔助電源,為DSP、上位機及IPM 模塊提供控制電源。上位機接受主系統(tǒng)控制,對DSP發(fā)出2路電機起停、4級加速度及8級速度的控制信號,DSP根據(jù)上位機的控制信號產(chǎn)生兩組6路脈沖分別控制兩個IPM模塊,從而控制兩路電機的起停、加速度及轉速。兩路電機的轉速通過軸編碼器反饋回上位機。IPM的故障信號反饋給DSP,DSP將故障信號及掉電信號反饋回上位機。系統(tǒng)框圖如圖1所示。
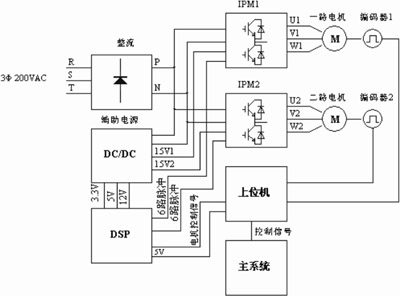
圖1 系統(tǒng)原理框圖
自舉電路
一般逆變電路中,因上臂3個IGBT的觸發(fā)脈沖的參考地是懸浮的,故上臂觸發(fā)脈沖需3組相互隔離的電源供電。下臂3個IGBT的觸發(fā)脈沖是共參考地的,只需一組供電電源。故共需多達4組相互隔離的電源。而三菱公司的DIP-IPM采用自舉電路結構,可方便地實現(xiàn)單電源驅動。具體工作原理如下:當 DIP-IPM起動時,先給下臂IGBT發(fā)出足夠的充電脈沖數(shù)或足夠寬的單個脈沖,開通下臂(N側)的IGBT,使下臂的供電電源通過IPM的內(nèi)部充電路徑使上臂的3個自舉電容完全充電,從而給上臂的3個IGBT的觸發(fā)脈沖供電。然后才開始發(fā)出PWM控制脈沖。自舉電路充電路徑及工作時序圖如圖2所示。
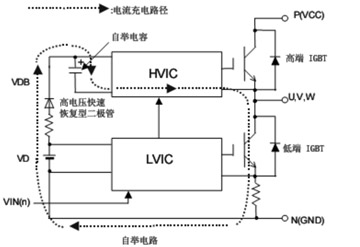
圖2 自舉電路充電路徑及工作時序圖
自舉電容C1的容值計算公式為C1=IBS X T1/△V,式中T1為上臂IGBT的最大通態(tài)(ON)脈寬,IBS為IC的驅動電流(考慮溫度和頻率特性),△V為允許的放電電壓。注意,用該式計算出的自舉電容容值應是最小值,實際選擇時應增加一定裕量。
自舉電阻R2的阻值選擇應滿足下述條件:時間常數(shù)R2 X C1能使放電電壓(△V)在下臂IGBT的最小導通脈寬(T2)內(nèi)被充電到C1上。即 R2={(VD-VDB) X T2}/(C1 X △V),式中VD為電源電壓,VDB為自舉電容C1上電壓。
自舉二極管選擇:對3Φ 200VAC電路,若電源輸入電壓波動范圍取±30%,則三相全橋整流后直流電壓 VD=200 X 1.3 X 1.35=351(V),取最小裕量為1.5,則自舉二極管耐壓應為351 X 1.5=526.5(V),取600V。故自舉二極管額定電壓最小應為600V,因為PWM載波頻率較高(最大為20KHZ),推薦選用快恢復二極管(反向恢復時間小于100nS)。
硬件設計要點
根據(jù)筆者設計該系統(tǒng)的經(jīng)驗,硬件設計應注意以下方面,以提高系統(tǒng)抗干擾性,使之在強干擾的現(xiàn)場工業(yè)環(huán)境中能可靠穩(wěn)定運行。
·雖然DIP-IPM模塊可由DSP直接驅動,但實際調試時發(fā)現(xiàn),在上電及對DSP進行flash編程過程中,DSP的引腳有時會出現(xiàn)不確定狀態(tài),產(chǎn)生干擾脈沖導致IPM的上、下臂IGBT直通引起短路保護動作。故我們在DSP到IPM的兩組觸發(fā)脈沖通道中分別加了一個八通道、雙電源3態(tài)門轉換收發(fā)芯片74LVC4245,該芯片的輸出使能端由一個簡單的邏輯門電路控制,如圖3所示。以確保在上電及對DSP進行flash編程時不會有干擾脈沖誤觸發(fā) IPM。
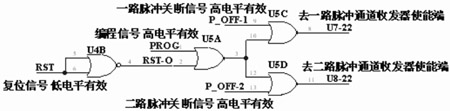
圖3 控制觸發(fā)脈沖通道通、斷的邏輯門電路
·為防止信號振蕩,應在各輸入端加RC退耦電路。對兩組觸發(fā)脈沖來說,RC電路一來可濾掉干擾脈沖,二來還可限制輸入脈沖的最小脈寬。RC容量的選擇要和PWM的載波頻率匹配,使得既能濾掉干擾信號,又不對觸發(fā)脈沖造成畸變。因為DIP-IPM輸入部分IC內(nèi)置2.5KΩ(min)下拉電阻,故RC中 R阻值的選擇應注意使分壓后的信號值滿足DIP-IPM的輸入電平閾值要求。
·DIP-IPM還有一個很實用的功能:短路保護。在本系統(tǒng)的軟件調試過程中,該功能多次發(fā)揮作用,可靠地保護了模塊,使本系統(tǒng)樣機調試過程中IPM模塊無一損壞。但要使該功能可靠發(fā)揮作用,應注意以下兩點:
1)外部電流檢測電阻的信號回路必須設置RC濾波電路,以免短路保護誤動作。RC時間常數(shù)的選擇要考慮IGBT的硬中斷能力,一般推薦為 1.5~2μS,最大不超過6μS。時間常數(shù)過短可能引起短路保護誤動作,過長則可能超出IPM模塊的耐受能力,不能有效保護IPM模塊。
2)外部電流檢測電阻應為無感電阻,該電阻及其信號引線到IPM模塊對應引腳的布線應盡可能短,以免由引線電感干擾引起短路保護誤動作。
·PCB布板時應注意采取以下抗干擾措施:
1)強電(功率部分)和弱電(控制部分)從區(qū)域上分開。
2)數(shù)字地(控制地)和模擬地(功率地)分開布局,只能在一點相接。一定要注意避免功率地線上的電流流經(jīng)控制地線,以免引入地線干擾。
3)PCB上IPM模塊相鄰觸發(fā)脈沖引腳間可開槽,避免相互干擾。
4)電流檢測電阻及其信號線、觸發(fā)脈沖信號及所有電容到IPM模塊的布線要盡可能短,盡量降低其引線電感引起的干擾。
結語:
該系統(tǒng)已批量生產(chǎn)上千臺,投入現(xiàn)場連續(xù)運行三年多。實際運行表明,該系統(tǒng)運行穩(wěn)定,工作良好。可以預計,DSP+IPM模式將是緊湊型變頻調速系統(tǒng)的發(fā)展方向之一。
參考文獻:
[1] TMS320LF2407A DSP controller,TI,2002
[2] DIP-IPM version3 應用技術資料,三菱電機株式會社,2003