
0 引言
隨著現(xiàn)代控制理論、微處理技術(shù)和電力電子技術(shù)的不斷發(fā)展,基于矢量控制的高性能交流傳動(dòng)系統(tǒng)得到廣泛的應(yīng)用。異步電機(jī)是一個(gè)多變量、強(qiáng)耦合、非線性的時(shí)變參數(shù)系統(tǒng),若以轉(zhuǎn)子磁通這一旋轉(zhuǎn)的空間矢量為參考坐標(biāo),再利用坐標(biāo)變換,就可以把定子電流中的勵(lì)磁分量和轉(zhuǎn)矩分量獨(dú)立開來分別進(jìn)行控制。這就是矢量控制的出發(fā)點(diǎn)。SVPWM調(diào)制技術(shù)把逆變器和電機(jī)看成一個(gè)整體來處理,所得模型簡(jiǎn)單,便于處理器實(shí)時(shí)控制,并具有轉(zhuǎn)矩脈動(dòng)小、噪聲低、電壓利用率高等優(yōu)點(diǎn)。本文以TI公司的專用電機(jī)控制芯片TMS320F2812為核心,給出了整個(gè)異步電機(jī)矢量控制系統(tǒng)的設(shè)計(jì)方案,并通過實(shí)驗(yàn)驗(yàn)證了其有效性。
1 異步電機(jī)矢量控制原理
矢量控制技術(shù)自從上世紀(jì)60、70年代開始,國(guó)內(nèi)外眾多專家學(xué)者就已經(jīng)進(jìn)行了潛心的研究,因此,矢量控制技術(shù)發(fā)展至今,內(nèi)容已經(jīng)非常豐富。本文只討論基于轉(zhuǎn)子磁場(chǎng)定向的矢量控制原理。
1.1 異步電機(jī)控制的數(shù)學(xué)模型
鼠籠式異步電機(jī)在d,q兩相同步旋轉(zhuǎn)坐標(biāo)系下的數(shù)學(xué)模型的電壓方程為:
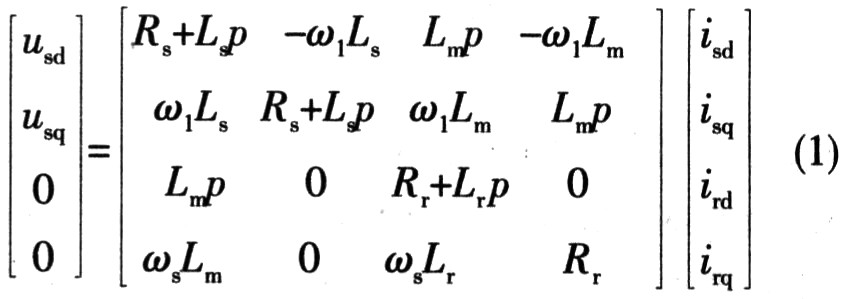
其中:usd和usq分別為d,q旋轉(zhuǎn)坐標(biāo)系下的定子電壓;isd和isq分別為d,q旋轉(zhuǎn)坐標(biāo)系下的定子電流;ird和irq分別為d,q旋轉(zhuǎn)坐標(biāo)系下的轉(zhuǎn)子電流;Rs和Ls分別為定子繞組的電阻與自感;Rr和Lr分別為定子繞組的電阻與自感;Lm為定轉(zhuǎn)子互感;P為微分算子;ω1為同步旋轉(zhuǎn)角頻率;ωs為轉(zhuǎn)差角頻率;
將轉(zhuǎn)子磁鏈?zhǔn)噶慷ㄔ赿軸方向上,可以推導(dǎo)出轉(zhuǎn)子磁鏈為:

其中:Tr為轉(zhuǎn)子時(shí)間常數(shù)。
由式(2)可見,調(diào)節(jié)定子電流的isd分量可以調(diào)節(jié)轉(zhuǎn)子磁鏈ψr,而當(dāng)保持該定子電流磁通分量不變時(shí),轉(zhuǎn)子磁通保持不變。其轉(zhuǎn)矩方程為:

其中:Te為電磁轉(zhuǎn)矩;np為電機(jī)的極對(duì)數(shù);由式(3)可見,控制定子電流isq分量可以控制電機(jī)的電磁轉(zhuǎn)矩Te,通過該轉(zhuǎn)矩分量可以調(diào)節(jié)電機(jī)的轉(zhuǎn)速。該控制系統(tǒng)采用雙閉環(huán)結(jié)構(gòu),圖1所示是其控制系統(tǒng)結(jié)構(gòu)原理圖。
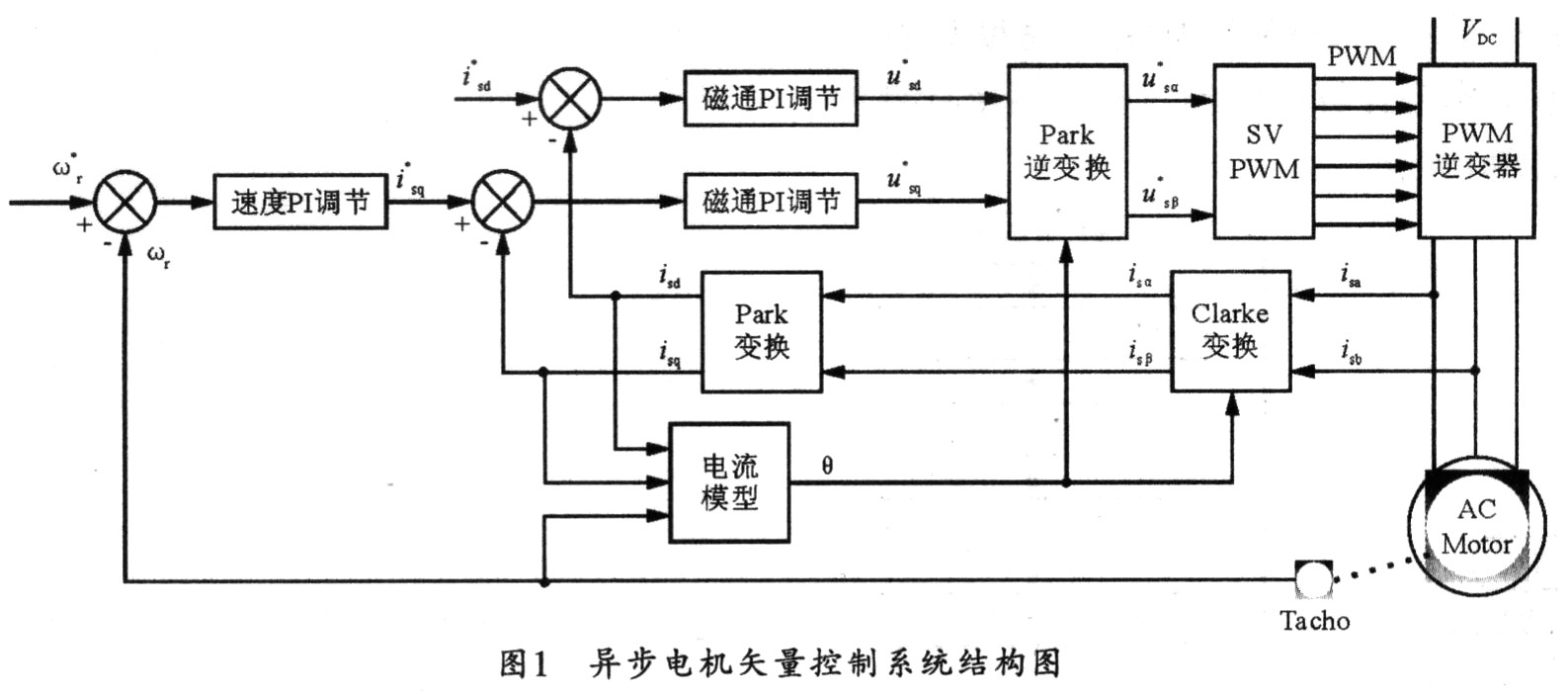
該控制系統(tǒng)所檢測(cè)的兩相定子電流經(jīng)Clarke與Park變換后可產(chǎn)生轉(zhuǎn)矩電流分量和勵(lì)磁電流分量,然后結(jié)合檢測(cè)轉(zhuǎn)速并通過電流模型計(jì)算坐標(biāo)變換所需的磁鏈角。檢測(cè)轉(zhuǎn)速與給定轉(zhuǎn)速誤差經(jīng)PI調(diào)節(jié)后將生成轉(zhuǎn)矩給定值。轉(zhuǎn)矩電流分量與勵(lì)磁電流分量的誤差經(jīng)PI調(diào)節(jié)可產(chǎn)生u小M。給定值,并在通過旋轉(zhuǎn)坐標(biāo)變換后輸入SVPWM模塊以產(chǎn)生6路PWM波,從而控制逆變器。
1.2 SVPWM原理
電壓空間矢量PWM技術(shù)是SPWM技術(shù)與電機(jī)磁鏈圓形軌跡直接結(jié)合的一種方法。它從電動(dòng)機(jī)角度出發(fā),直接以電動(dòng)機(jī)磁鏈圓形軌跡控制為目的,該方法不僅在控制上與SPWM的效果相同,而且更直觀,物理意義更明晰,實(shí)現(xiàn)起來也很方便。SVPWM調(diào)制方法是利用交替使用不同的電壓空間矢量(六個(gè)基本電壓矢量和兩個(gè)零矢量)合成實(shí)現(xiàn)的。參考矢量合成規(guī)則是:由當(dāng)前參考矢量所在扇區(qū)的兩個(gè)電壓矢量分別作用一定時(shí)間合成所得。為了補(bǔ)償參考矢量的旋轉(zhuǎn)頻率,設(shè)計(jì)時(shí)需要插入零矢量。
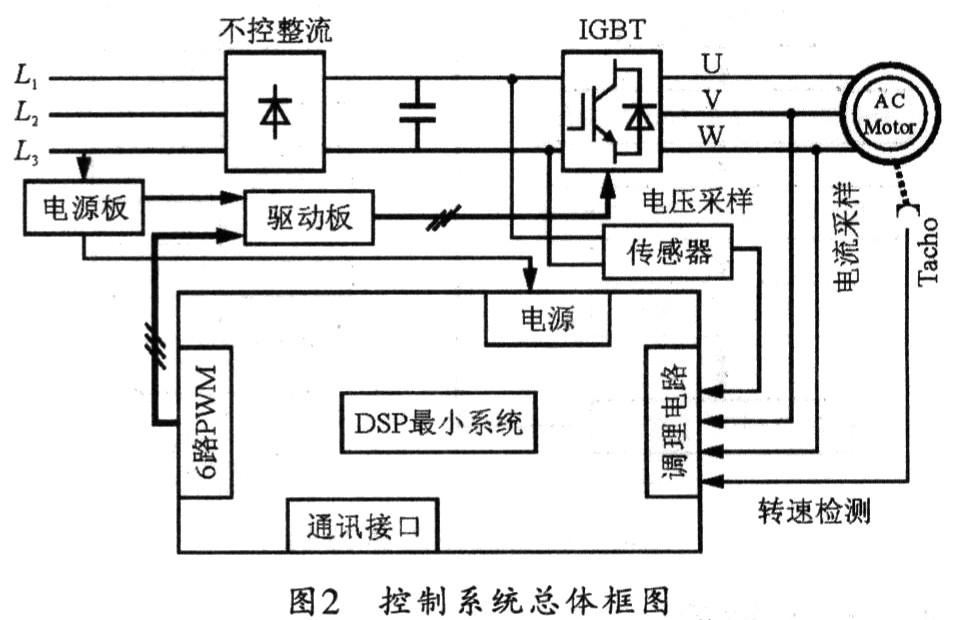
2 控制系統(tǒng)硬件組成
本系統(tǒng)主電路由整流電路、中間直流電容濾波和IGBT模塊封裝逆變器等組成。控制電路采用TI公司的電機(jī)專用控制芯片TMS320F2812為核心,由DSP最小系統(tǒng)板與控制底板構(gòu)成,用以實(shí)現(xiàn)采樣調(diào)理、矢量控制及SVPWM調(diào)制算法等。此外,該控制系統(tǒng)還包括隔離開關(guān)電源、PWM驅(qū)動(dòng)電路、轉(zhuǎn)速轉(zhuǎn)矩傳感器、以及霍爾電流傳感器等輔助電路,其中開關(guān)電源為整個(gè)控制電路提供多路隔離電源,其控制系統(tǒng)總體框圖如圖2所示。
2.1 定子電流檢測(cè)
通過霍爾電流傳感器可將采樣得到的兩相定子電流經(jīng)過調(diào)理電路后送入DSP的AD口,以將模擬信號(hào)轉(zhuǎn)換為數(shù)字信號(hào)。其采樣轉(zhuǎn)換過程如圖3所示。

2.2 轉(zhuǎn)速檢測(cè)
通過智能數(shù)字式轉(zhuǎn)矩轉(zhuǎn)速測(cè)量?jī)x可檢測(cè)轉(zhuǎn)速。當(dāng)測(cè)速碼盤連續(xù)旋轉(zhuǎn)時(shí),可通過光電開關(guān)輸出具有一定周期寬度的脈沖信號(hào),這樣,根據(jù)碼盤的齒數(shù)和輸出信號(hào)的頻率,即可計(jì)算出相應(yīng)的轉(zhuǎn)速。
3 控制系統(tǒng)軟件設(shè)計(jì)
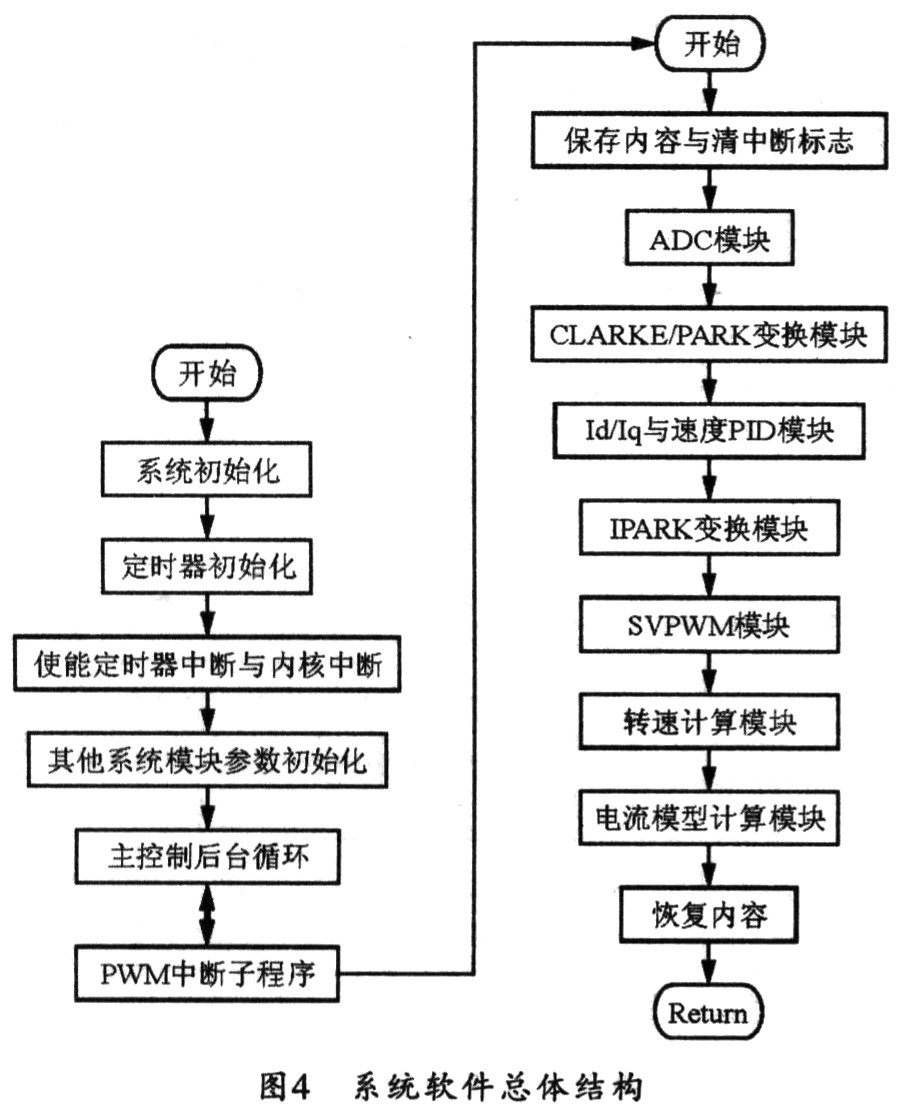
控制系統(tǒng)軟件主要分為兩部分:一是控制系統(tǒng)主程序,包括系統(tǒng)初始化、定時(shí)器初始化、使能定時(shí)器下溢中斷與CPU中斷、其他系統(tǒng)模塊參數(shù)初始化等;二是中斷子程序,包括ADC模塊、CLARKE/PARK變換模塊、Id/Iq與速度PID模塊、PARK逆變換模塊、SVPWM模塊、速度計(jì)算模塊、電機(jī)電流模型計(jì)算模塊等。整個(gè)系統(tǒng)軟件的總體結(jié)構(gòu)如圖4所示。
4 實(shí)驗(yàn)結(jié)果
通過實(shí)驗(yàn)可對(duì)上述矢量控制算法進(jìn)行實(shí)驗(yàn)驗(yàn)證,實(shí)驗(yàn)時(shí),可選功率開關(guān)管的開關(guān)頻率為5kHz,死區(qū)為5.2μs。電機(jī)為4極三相籠型異步電機(jī),其額定參數(shù)為:PN=3 kW,UN=220V,IN=7.5A,fN=50 Hz,nN=1500 r/min。圖5所示是實(shí)驗(yàn)得出的結(jié)果和響應(yīng)曲線。
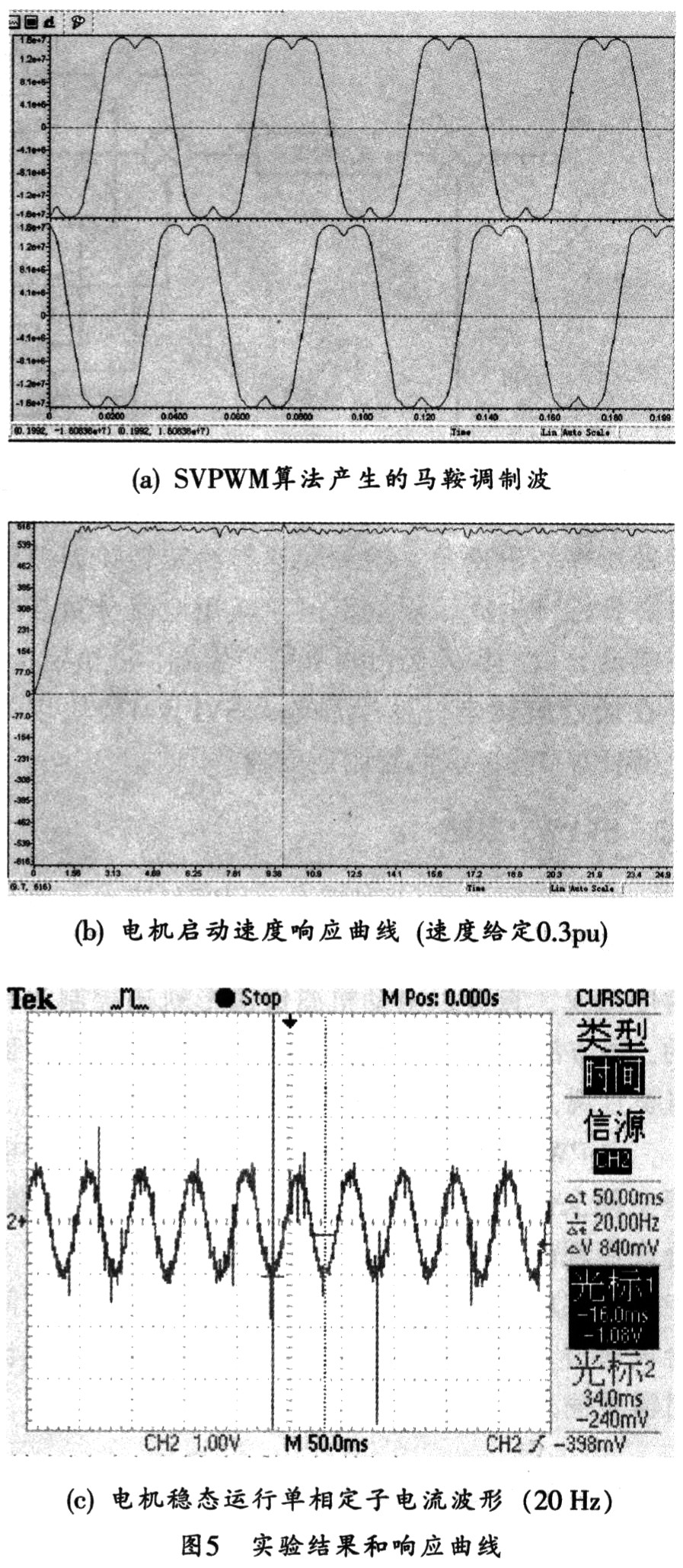
該實(shí)驗(yàn)結(jié)果顯示,該控制系統(tǒng)具有良好的動(dòng)態(tài)和靜態(tài)特性。
5 結(jié)束語(yǔ)
本文以TI公司的電機(jī)控制專用DSP芯片TMS320F2812為基礎(chǔ),采用基于轉(zhuǎn)子磁場(chǎng)定向控制和SVPWM調(diào)制技術(shù),構(gòu)建了一種異步電機(jī)矢量控制系統(tǒng),并通過實(shí)驗(yàn)驗(yàn)證了該控制算法的正確性和有效性,具有一定的實(shí)用價(jià)值。