噪聲主動控制基本思想是由德國物理學(xué)家Paul Lueg于1936年發(fā)明“電子消聲器”時首次提出的。噪聲主動控制技術(shù)相對傳統(tǒng)的被動控制,具有對中、低頻段噪聲控制效果明顯、系統(tǒng)輕巧、實時性強(qiáng)等優(yōu)點,具有潛在的工程應(yīng)用價值。
噪聲控制為實時控制,需要較大的計算量,普通的單片機(jī)難以實現(xiàn)。20世紀(jì)80年代,數(shù)字信號處理(DSP)芯片的問世為信號的實時控制開辟了廣闊的發(fā)展空間。隨著芯片技術(shù)的不斷成熟和發(fā)展,DSP已成為現(xiàn)代智能控制器的核心部件。
本文采用DSP芯片TMS320F2812設(shè)計了既可以脫機(jī)獨立自主運行又可以通過USB接口在線仿真的智能控制器,并以該控制器為核心設(shè)計了汽車內(nèi)部噪聲主動智能控制系統(tǒng)。
智能控制系統(tǒng)的電路設(shè)計
1 設(shè)計過程及系統(tǒng)框圖
汽車內(nèi)部噪聲智能控制系統(tǒng)的設(shè)計過程如圖1所示。
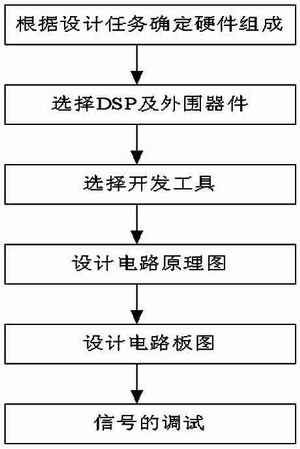
圖1 DSP智能控制器硬件設(shè)計流程圖
在器件選型時,要考慮器件之間的相互匹配性,以及器件的供貨能力和技術(shù)支持等。本設(shè)計選用的DSP芯片TMS320F2812性能如下:采用高性能的靜態(tài)CMOS低功耗設(shè)計技術(shù),主頻高達(dá)150MIPS(時鐘周期6.67ns),支持JTAG邊界掃描接口;高效32位高精度CPU;并有最多可達(dá)128K×16的FLASH存儲器等。
電路板的設(shè)計需要傳輸線理論知識以及布線工藝和系統(tǒng)結(jié)構(gòu)設(shè)計知識,以保證信號的完整性,另外著重考慮電磁干擾和電磁兼容性問題。
如圖2所示,智能控制器主要由模擬電路部分(包括數(shù)字信號采集電路和輸出信號處理電路)、DSP子系統(tǒng)(包括DSP芯片及外圍電路)、電源、時鐘及復(fù)位電路等構(gòu)成。下面將介紹幾個主要電路的設(shè)計。
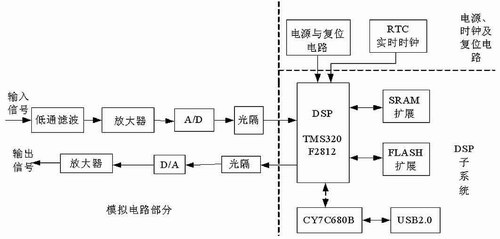
圖2 智能控制器結(jié)構(gòu)框圖
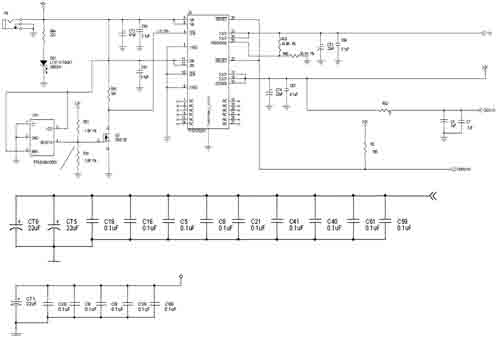
圖3 電源和復(fù)位電路
2 電源與復(fù)位電路設(shè)計
DSP系統(tǒng)對電源的性能(如紋波、上電順序等)要求較高,因此在本設(shè)計選用了線性調(diào)壓電路芯片TPS767D301。TPS767D301為雙輸出低漏電壓調(diào)整器,其特點如下:每個電源輸出都有單獨的復(fù)位和輸出使能控制;具有快速瞬態(tài)響應(yīng)功能;電壓輸出3.3V/1.8V可調(diào)。
采用TPS767D301構(gòu)成的電源電路從外部穩(wěn)壓電源引入+5V電壓,+5V電壓經(jīng)TPS767D301后輸出電壓為1.8V和3.3V。為減小電源本身對DSP的干擾,在電路中增加了濾波網(wǎng)絡(luò),如圖3所示。
3 A/D、D/A電路設(shè)計
TMS320F2812芯片上有一個12位、轉(zhuǎn)換頻率為25MHz的ADC,其前端為兩個8選1的多路轉(zhuǎn)換器和兩路同時采樣/保持器。在要求不很高時,完全可利用其構(gòu)成同步順序采樣電路,或者增加外部采樣保持器后構(gòu)成同步采樣。考慮到本系統(tǒng)對電量采集精度和速度的要求較高,采樣模塊中選用了外置的六通道16位ADC ADS8364。該器件內(nèi)部包括6個高速采樣-保持放大器、6個高速ADC、一個參考電壓源及3個參考電壓緩沖器,可以提供250KSPS的同步采樣率,還可提供具有超低功耗(69mW/每通道)的所有6個輸入通道的轉(zhuǎn)換,這樣使得所有通道的單位成本均較低。6個通道的數(shù)據(jù)輸出接口電壓介于2.7~5.5V,便于與DSP直接接口,省去了中間的電平轉(zhuǎn)換。6個完全獨立的ADC可大大提高硬件整體的并行處理速度,在50kHz輸入信號下仍可保證大于80dB的卓越共模抑制能力,特別適合用于高干擾環(huán)境。圖4為ADS8364與TMS320F2812的接口電路。
為了實現(xiàn)系統(tǒng)的控制功能,D/A轉(zhuǎn)換電路中選用四路12位電壓輸出型DAC TLV5614,它具有靈活的四線串行接口,可以與TMS320 SPI、QSPI和Microwire串行口實現(xiàn)無縫連接。TLV5614的編程控制由16位串行字組成,即兩位DAC地址、兩個獨立的DAC控制位和12位的DAC輸入值。器件采用雙電源供電:一組為串行接口使用的數(shù)字電源,即DVDD和DGND;另一組為輸出緩沖器使用的模擬電源,即AVDD和AGND。兩組電源相互獨立且可為2.7~5.5V之間的任何值。雙電源應(yīng)用的好處是DAC使用5V電源工作,而DAC的數(shù)字部分使用2.7~5.5V電源,可以和多種接口連接。
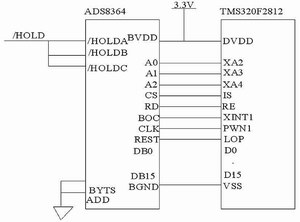
圖4 ADS8364與TMS320F2812的接口電路
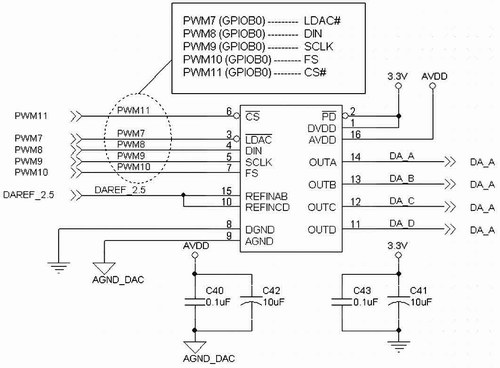
圖5 TLV5614接口電路
在設(shè)計中,D/A電路采用了2.5V的參考電壓,為了控制方便,在控制D/A時,使用TMS320F2812的GPIOB作為轉(zhuǎn)換芯片控制線,電路如圖5所示。
4 外部SRAM、FLASH擴(kuò)展電路設(shè)計
由于該控制系統(tǒng)需要存儲大量的數(shù)據(jù)以備分析和利用,根據(jù)DSP與外部存儲器之間的“零等待”原則,采用IS61LV6416-12T擴(kuò)展F2812的外部存儲器,IS61LV6416-12T為64K×16高速CMOS SRAM,3.3V供電,其與TMS320F2812的接口電路如圖6所示。
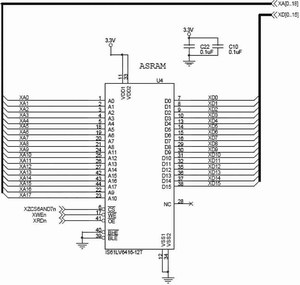
圖6 外部存儲器擴(kuò)展電路
汽車內(nèi)部噪聲主動控制實驗系統(tǒng)設(shè)計
本控制實驗系統(tǒng)主要由4部分組成:汽車被控系統(tǒng)模型(含執(zhí)行器)、外部聲源、控制器和信號監(jiān)視(含傳感器),如圖7所示。需要說明的一點是:在控制系統(tǒng)中,被控汽車模型包含多塊鋁板,在此為了表達(dá)方便,只畫出其中一塊。
在實驗系統(tǒng)中,采用外部揚聲器模擬艙體從外部受到的激勵。揚聲器發(fā)出的聲波迫使汽車模型的一個由鋁板構(gòu)成的面發(fā)生受迫振動,從而使汽車內(nèi)部出現(xiàn)較大的噪聲;當(dāng)放置在箱體內(nèi)部指定位置的聲壓傳感器檢測到該處的聲壓變化,就把最新的聲壓值向DSP控制器傳送,控制器根據(jù)此時系統(tǒng)的輸入和輸出情況,及時做出判斷,對系統(tǒng)施加控制,此控制功能是通過粘貼在封閉艙體薄鋁板壁上的PZT執(zhí)行器完成的,因為PZT在控制信號的作用下能夠產(chǎn)生振動能量,同樣使鋁板受迫振動,以此來降低汽車內(nèi)部指定位置的噪聲。
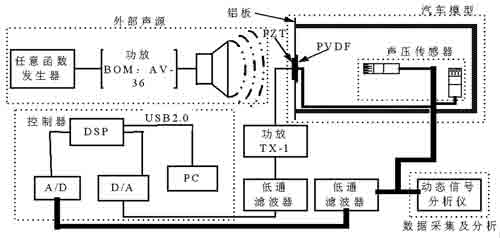
圖7 實驗系統(tǒng)組成示意圖
1 汽車被控系統(tǒng)模型
由于本設(shè)計是針對汽車內(nèi)部噪聲展開的,為了研究方便,采用了粗略的轎車模型作為被控對象。該模型的四面由1mm的鋁板組成,在車身上和車身內(nèi)部安裝有控制傳感器,其中該控制系統(tǒng)的執(zhí)行器是PZT,對稱地安裝在模型上。
由于壓電陶瓷具有把電能轉(zhuǎn)變?yōu)闄C(jī)械能的能力,因此當(dāng)應(yīng)用系統(tǒng)通電給壓電陶瓷時,材料的自發(fā)偶極矩發(fā)生變化,從而使材料的尺寸發(fā)生改變,這種效應(yīng)可在20ms內(nèi)產(chǎn)生50μm的位移,響應(yīng)速度之快是其他材料無法比擬的,而且頻帶很寬,對溫度不敏感,隨著加壓次數(shù)的增加,性能趨于穩(wěn)定,并且容易集成,是高精度、高速驅(qū)動器所必須的材料。本設(shè)計選用了壓電材料PZT作為執(zhí)行器。
2 外部聲源
實驗中的外部聲源是由揚聲器代替的,揚聲器由信號發(fā)生器發(fā)出的信號經(jīng)過功率放大器后驅(qū)動。
3 智能控制器
以TMS320F2812DSP芯片為核心的智能控制器既可以脫機(jī)獨立自主運行又可以通過USB接口在線仿真。
4 信號監(jiān)視器
為了能夠監(jiān)視箱內(nèi)的控制誤差信號和壓電片驅(qū)動信號并進(jìn)行信號處理,本控制系統(tǒng)的信號監(jiān)視器采用了自行開發(fā)的多功能信號采集和處理系統(tǒng)。
本設(shè)計所選用的座位傳感器的壓電材料為壓電薄膜PVDF,PVDF感知的信號作為系統(tǒng)的參考信號。PVDF很薄、柔軟、密度低且靈敏度很高,其機(jī)械柔韌性比壓電陶瓷高10倍。PVDF壓電材料的壓電性比石英高3~5倍,壓電系數(shù)更高,可貼在物體表面。
結(jié)論
本文以TMS320F2812 DSP為基礎(chǔ)設(shè)計了既可以脫機(jī)獨立自主運行又可以通過USB接口在線仿真的智能控制器。并以該控制器為核心設(shè)計了汽車內(nèi)部噪聲主動智能控制實驗系統(tǒng)。通過理論分析, 該控制系統(tǒng)具有較高的數(shù)據(jù)處理能力和處理速度,因此在實時控制中能夠發(fā)揮重要的作用。
