
*基金項(xiàng)目:沈陽航空航天大學(xué)大學(xué)生創(chuàng)新創(chuàng)業(yè)訓(xùn)練計(jì)劃項(xiàng)目(X202210143008)
本文引用地址:http://www.eepw.com.cn/article/202302/443559.htm
1 前言
現(xiàn)有智能垃圾車一般沒有配備衛(wèi)星導(dǎo)航裝置,不能實(shí)現(xiàn)全自主行進(jìn)功能,是智能化垃圾車難以實(shí)際應(yīng)用的重要因素之一。
北斗衛(wèi)星導(dǎo)航系統(tǒng)是我國(guó)自主建設(shè)、獨(dú)立運(yùn)行的衛(wèi)星導(dǎo)航定位系統(tǒng),系統(tǒng)能提供時(shí)間和空間基準(zhǔn),以及與位置相關(guān)的實(shí)時(shí)動(dòng)態(tài)信息,將北斗系統(tǒng)導(dǎo)入垃圾清掃機(jī)器車中,符合國(guó)家將北斗衛(wèi)星全行業(yè)植入發(fā)展的科技戰(zhàn)略和保護(hù)環(huán)境的基本宗旨,也是改善社會(huì)公共服務(wù)和提高人民生活環(huán)境水平的重要舉措。
表1 基于北斗的輪履復(fù)合式清掃車各功能模塊概述

2 系統(tǒng)總體方案設(shè)計(jì)
系統(tǒng)功能模塊包括:中心控制模塊、北斗路況檢測(cè)模塊、北斗導(dǎo)航定位模塊、自主動(dòng)態(tài)避障模塊、工作行進(jìn)模塊、垃圾撿取模塊,各模塊功能簡(jiǎn)介見表1。
根據(jù)上述分析,本項(xiàng)目主要實(shí)現(xiàn)功能如下:
1)本車采用北斗導(dǎo)航定位彌補(bǔ)不足,規(guī)劃出多種線路,進(jìn)行擇優(yōu)選擇;
2)采用自主避障模式保證人員與車輛安全,利用北斗衛(wèi)星對(duì)周圍環(huán)境人員密集度的實(shí)時(shí)檢測(cè),避免大規(guī)模人群;
3)用輪履復(fù)合結(jié)構(gòu)有效應(yīng)對(duì)多種復(fù)雜環(huán)境,3 種工作模式的適時(shí)切換,可通過絕大部分復(fù)雜地形。
3 主要功能模塊設(shè)計(jì)
3.1 清掃車中心控制模塊
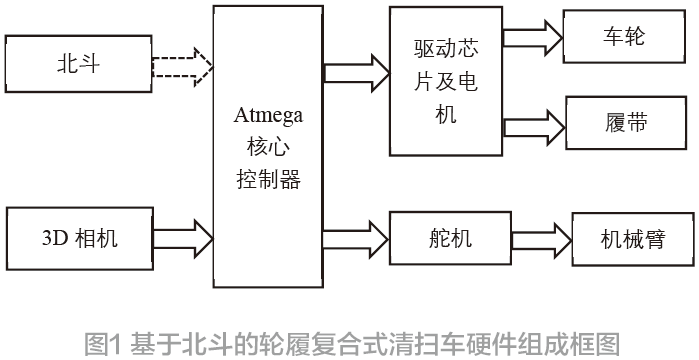
清掃車硬件組成框圖如圖1 所示,圖中的中心控制模塊對(duì)北斗和3D 相機(jī)傳遞回來的信息分析處理,之后對(duì)工作行進(jìn)模塊以及垃圾撿拾模塊進(jìn)行控制。
基于功能需求、成本和資源豐富性考慮,清掃車中心控制模塊采用Atmega 為核心控制器。Atmega 具有高性能、低功耗的8 位AVR 微處理器,兩個(gè)具有獨(dú)立預(yù)分頻器和比較器功能的8 位定時(shí)器、比較器,使得其在圖像處理上有更大優(yōu)勢(shì),便于基于VSLAM 技術(shù)構(gòu)建清掃車所在區(qū)域的三維地圖。
3.2 北斗路況檢測(cè)模塊
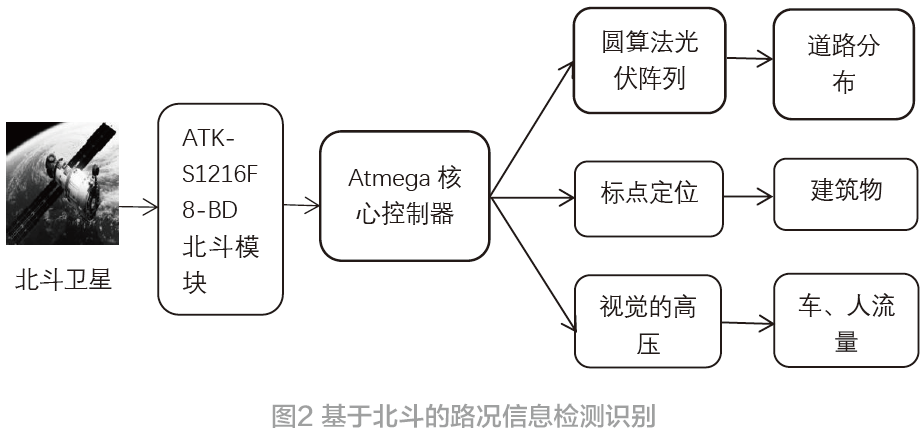
北斗衛(wèi)星可以采集一定范圍內(nèi)的路況信息,通過ATK -S1216F8-BD 北斗模塊將數(shù)據(jù)傳輸?shù)紸tmega 控制器中。系統(tǒng)在其與北斗導(dǎo)航系統(tǒng)信號(hào)傳輸?shù)耐瑫r(shí)將地理位置傳輸?shù)街行目刂颇K,并通過數(shù)據(jù)存儲(chǔ)相關(guān)模塊進(jìn)行短期的地理位置的數(shù)據(jù)存儲(chǔ),最終將實(shí)時(shí)的地理位置數(shù)據(jù)傳輸?shù)娇刂浦行牡臄?shù)據(jù)處理系統(tǒng)終端。
后Atmega 控制器采用圓算法的光伏陣列、標(biāo)點(diǎn)定位、視覺的高壓方法檢測(cè)識(shí)別不同的路況信息。路況信息檢測(cè)識(shí)別過程如圖2所示。
1)檢測(cè)道路分布情況
使用圓算法的光伏陣列法,首先建立道路模型、城市模型和定位子系統(tǒng),掃描大致路況,然后構(gòu)建數(shù)學(xué)模型,采用圓算法對(duì)道路的分布情況進(jìn)行檢測(cè),使清掃車可以得到可行進(jìn)的道路,避免清掃車在道路上亂行。
2)檢測(cè)識(shí)別建筑物
使用標(biāo)點(diǎn)定位法,首先用柵格法建立路況的模型,其中用小方格代表所檢測(cè)的環(huán)境,并對(duì)環(huán)境矩形建模。接著建立道路上高大建筑物、樹木等數(shù)學(xué)模型,根據(jù)模型進(jìn)行訓(xùn)練,檢測(cè)識(shí)別出建筑物,避免發(fā)生危險(xiǎn)。
3)檢測(cè)車、人流量
使用視覺高壓法,北斗衛(wèi)星具有自動(dòng)化視覺檢測(cè)定位子系統(tǒng),根據(jù)全局搜索與區(qū)域細(xì)分檢驗(yàn)相結(jié)合的原理,進(jìn)行投影變換。可對(duì)車流量、人流量密集的道路進(jìn)行檢測(cè),當(dāng)一些車流量、人流量密集的時(shí)候,清掃車可以暫時(shí)排除此道路。
3.3 導(dǎo)航定位模塊
導(dǎo)航定位模塊分為兩個(gè)部分:北斗定位和自主規(guī)劃最優(yōu)路線。
1)北斗定位
利用北斗衛(wèi)星的定位技術(shù)將清掃車出發(fā)點(diǎn)的地理位置、終點(diǎn)的地理位置、清掃車實(shí)時(shí)位置相比較,通過北斗導(dǎo)航定位中的二維定位法,確定位置信息的經(jīng)緯度。同時(shí)采用圓算法的光伏陣列法,將從出發(fā)點(diǎn)到終點(diǎn)的所有路徑進(jìn)行整合,為下一步進(jìn)行路線規(guī)劃打好基礎(chǔ)。
2)自主動(dòng)態(tài)地規(guī)劃最優(yōu)清掃路線
采用柵格法構(gòu)建清掃車行進(jìn)的路線模擬圖,從所有由出發(fā)點(diǎn)到終點(diǎn)的清掃路線中,結(jié)合實(shí)時(shí)路況擁堵情況,選擇出清掃時(shí)間最短的最優(yōu)路線。
如圖3 所示,假設(shè)清掃車要清掃A 位置到B 位置的所有道路,圖中白色區(qū)域?yàn)橐鍜叩牡缆罚谏珔^(qū)域?yàn)榻ㄖ铩A環(huán)區(qū)域?yàn)榧t燈、斜杠區(qū)域?yàn)閾頂D路段, 其中一個(gè)小格代表的實(shí)際距離為500 m。由于清掃車在建筑物拐角處要進(jìn)行拐彎,可根據(jù)清掃車要拐彎的數(shù)量計(jì)算出所有可能的路線數(shù)量S 為:

式中n 為拐點(diǎn)數(shù)。清掃車由A走向B要經(jīng)過14 個(gè)拐點(diǎn)( 經(jīng)過建筑物的數(shù)量),所以清掃車有S = 105 條路線可供選擇。理想情況下,即當(dāng)沒有紅燈、道路并不擁擠的情況下,經(jīng)過拐點(diǎn)數(shù)量最少的道路即為最短路線,清掃用時(shí)最短。但是若出現(xiàn)道路擁堵等特殊情況,按理想路線行駛并不能省時(shí)節(jié)能。因此本項(xiàng)目在規(guī)劃路徑時(shí),結(jié)合北斗衛(wèi)星檢測(cè)到的實(shí)時(shí)路況,自主動(dòng)態(tài)的調(diào)整行駛路線。
如圖4 可知,當(dāng)存在紅燈和擁擠時(shí),清掃車在建筑物②左上角處拐彎然后在建筑物⑧右下角處拐彎再在建筑物?右上角處拐彎,最后在建筑物?左下角處拐彎,共需要經(jīng)過27 個(gè)小格,為最優(yōu)路線。采用柵格法將城市道路轉(zhuǎn)化為數(shù)學(xué)模型,通過計(jì)算,分析清掃車的工作時(shí)的車速。清掃車的行駛速度應(yīng)在3~20 km/h,清掃車根據(jù)路面的實(shí)際情況來調(diào)整車速。清掃路線模擬圖如圖6 所示。圖中深黑色箭頭,在沒有經(jīng)過紅燈和人群路段時(shí)會(huì)加快車速。例如,箭頭經(jīng)過路線為27 小格,代表實(shí)際距離為13.5 km。此時(shí)為節(jié)約時(shí)間保證清掃干凈,車速將控制在15~20 km/h。所以所需要的時(shí)間為0.675~0.9 h。在工作途中遇到行人、車輛會(huì)停止避免發(fā)生危險(xiǎn)。例如,圖6 灰色箭頭所示,途中經(jīng)過紅燈、人群擁堵路段,清掃車會(huì)降低車速。箭頭經(jīng)過路線為31 小格,代表實(shí)際距離為15.5 km。車速應(yīng)保持在8~15 km/h,避免發(fā)生意外。其中等待紅燈的時(shí)間為30 s、經(jīng)過人群車速為3~8 km/h。所以所需時(shí)間為2.66~5.225 h。

圖3 清掃路線示意圖

圖4 清掃路線模擬圖
3.4 自主動(dòng)態(tài)避障模塊
在清掃車工作過程中,清掃車應(yīng)對(duì)隨時(shí)出現(xiàn)的人或物體采取及時(shí)、精確、自主的避讓措施,這就要求清掃車能夠?qū)ξ蛔藢?shí)時(shí)改變的人或物體進(jìn)行分析,并進(jìn)行自主動(dòng)態(tài)避障,為清掃車在所處實(shí)時(shí)變化的環(huán)境下的工作安全提供保障。
對(duì)比幾種在二維平面中進(jìn)行測(cè)距實(shí)現(xiàn)避障的策略,本設(shè)計(jì)選用3D 相機(jī)作為采集信息的視覺傳感器,利用3D 相帶有的測(cè)距功能,采用VSLAM 技術(shù),通過構(gòu)建三維地圖的方式搭建清掃車周邊的環(huán)境地圖,相比其它距離傳感器而言,應(yīng)用3D 視覺傳感器更能獲取足夠豐富的圖像信息。
VSLAM 處理流程如圖5 所示。通過VSLAM 處理相機(jī)采集的多幀圖像來估計(jì)自身的位姿變化,而后通過累計(jì)位姿的變化計(jì)算出清掃車與人或物體的距離,并進(jìn)行地圖構(gòu)建與全局定位;采用圖像處理技術(shù)進(jìn)行閉環(huán)檢測(cè),即采用邊緣描述法和體積描述法描述VSLAM 構(gòu)建地圖中的人或物體的幾何特性,并對(duì)目標(biāo)位姿進(jìn)行數(shù)據(jù)標(biāo)注;對(duì)經(jīng)由閉環(huán)檢測(cè)得到的信息,由核心控制器對(duì)所構(gòu)建的三維地圖中的物體的幾何特性信息、位姿信息進(jìn)行分析比對(duì)和優(yōu)化處理,完成全局軌跡和地圖的構(gòu)建;最后進(jìn)行自主動(dòng)態(tài)避障決策,實(shí)現(xiàn)清掃車的自主動(dòng)態(tài)避障。

3.5 面對(duì)復(fù)雜地形的行走模式自主切換
1)履帶模式
履帶模式采用履帶接觸地面,車輪附著在履帶兩側(cè)。履帶模式特點(diǎn)為行進(jìn)平穩(wěn),行進(jìn)速度較為緩慢,重心低,附著系數(shù)大,具有良好的抗側(cè)翻和抗滑坡性能,同時(shí)還具有轉(zhuǎn)彎半徑小的機(jī)動(dòng)性,爬坡能力強(qiáng)等優(yōu)越的越野性能,屬于全地形的作業(yè)機(jī)械。
2)車輪模式
車輪模式采用車輪接觸地面,傳動(dòng)桿伸長(zhǎng)以抬高車體。車輪模式特點(diǎn)為行進(jìn)速度較快,效率高,車輪可180 度調(diào)節(jié)故其方向調(diào)整靈活度高,機(jī)動(dòng)性強(qiáng)。適用于較為平坦的路面以及水洼等需要抬高車體的情況,因其高機(jī)動(dòng)性能也適用于人員較為密集的場(chǎng)所。
3)輪履復(fù)合模式
輪履復(fù)合模式采用車輪與履帶的同時(shí)作用,傳動(dòng)桿伸縮自身長(zhǎng)度以改變車輪與履帶間距。輪履復(fù)合模式特點(diǎn)為可實(shí)時(shí)調(diào)節(jié)車輛重心,保持車身穩(wěn)定性,車輪履帶相互作用,可彌補(bǔ)各自缺點(diǎn)。適用于臺(tái)階、樓梯等復(fù)雜路況。
4 結(jié)束語
本文針對(duì)垃圾清掃車自主規(guī)劃清掃路線這一特殊要求,在自主避障研究的基礎(chǔ)上與北斗衛(wèi)星相結(jié)合,提高了自主清掃能力。并且對(duì)復(fù)雜地形進(jìn)行了分析,對(duì)車體結(jié)構(gòu)進(jìn)行改良,效果良好。
參考文獻(xiàn):
[1] 蔣勇.地面清潔機(jī)器人結(jié)構(gòu)及控制系統(tǒng)設(shè)計(jì)[D].南京:南京理工大學(xué),2018.
[2] 李延斌,牛雷,佟賀.基于GPS的智能車自動(dòng)駕駛系統(tǒng)的研制[J].電子產(chǎn)品世界,2018,25(11):61-63,50.
[3] 冉冬東.輪履切換型道路垃圾清理機(jī)器人的設(shè)計(jì)[J].工程科技Ⅱ輯,2021,40(5):42-44.
[4] 李雪艷.智能掃地車系統(tǒng)設(shè)計(jì)與研究[J].機(jī)電信息,2015(33):179-180.
[5] 許俊勇.移動(dòng)機(jī)器人全景vSLAM研究[D].上海:上海交通大學(xué),2008.
[6] 尹韜儒.無人駕駛垃圾清掃車的設(shè)計(jì)與北斗導(dǎo)航定位系統(tǒng)應(yīng)用[J].中國(guó)新技術(shù)新產(chǎn)品,2016(16):19-20.
[7] 張明路,李敏,田穎,等.輪履復(fù)合被動(dòng)自適應(yīng)機(jī)器人設(shè)計(jì)與參數(shù)分析[J].機(jī)械科學(xué)與技術(shù),2019,38(2):198-204.
(本文來源于《電子產(chǎn)品世界》雜志2023年2月期)
更多信息可以來這里獲取==>>電子技術(shù)應(yīng)用-AET<<
