
順應(yīng)消費(fèi)者對(duì)更佳用戶體驗(yàn)和智能自動(dòng)化控制的需求,光學(xué)接近式傳感器已經(jīng)廣泛應(yīng)用到具備臉部檢測(cè),、手部動(dòng)作和距離檢測(cè)等各種技術(shù)上,,例如智能手機(jī),、液晶電視顯示屏,、計(jì)算機(jī)和鍵盤背光顯示、數(shù)碼相機(jī)取景器,、自動(dòng)光度切換和衛(wèi)生間龍頭控制等應(yīng)用,。
本文將介紹接近式傳感器的工作原理,以及使用時(shí)在信號(hào)放大,、濾波和信號(hào)調(diào)整方面所面臨的挑戰(zhàn),。此外,也將討論設(shè)計(jì)工程師如何通過使用全方位的接近式傳感器方案解決LED長(zhǎng)時(shí)間高電流保護(hù),、陽(yáng)光和環(huán)境光源消除等問題,,確保光學(xué)接近式傳感器的穩(wěn)固性和性能。
反射型光學(xué)接近式傳感器介紹和工作原理
光學(xué)接近式傳感器基本上是由紅外LED發(fā)射器和PIN光檢測(cè)器所組成,,圖1為典型接近式傳感器的功能方塊圖,。
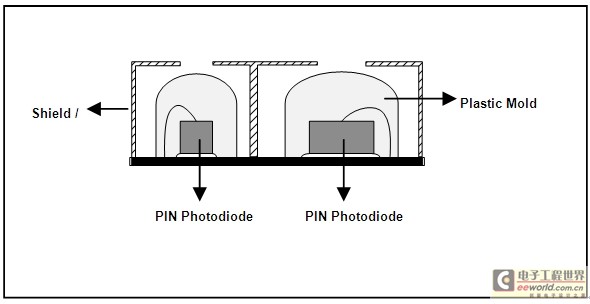
圖1:接近式傳感器的功能方塊圖,。
作為電到光的轉(zhuǎn)換器,LED發(fā)射器會(huì)發(fā)射紅外脈沖,,并通過提供由光轉(zhuǎn)換回到電氣信號(hào)的光二極管檢測(cè)器感應(yīng)由遮蔽物體或表面反射的紅外脈沖,,請(qǐng)參考圖2中的功能方塊圖說明。
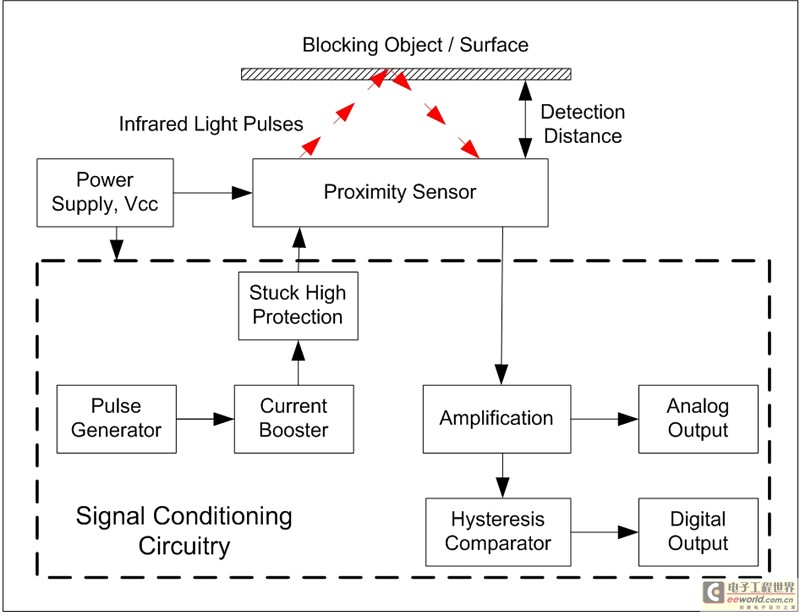
圖2:接近式傳感器的工作原理圖,。
接近式傳感器的基本工作原理非常簡(jiǎn)單,,紅外脈沖由LED發(fā)射器發(fā)出,到達(dá)離開傳感器特定檢測(cè)距離的障礙物體或表面,,并發(fā)生穿透,、散射或反射回到光二極管檢測(cè)器,接著光二極管會(huì)產(chǎn)生可以通過外部負(fù)載電阻轉(zhuǎn)換成為輸出電壓的光電流,,輸出光電流的大小則由檢測(cè)距離和LED的驅(qū)動(dòng)電流大小決定,,在特定LED光度輸出條件下,物體或表面越接近傳感器,,反射的光強(qiáng)度越高,,因此光二極管傳感器所提供的光電流輸出也越大。
接近式傳感器信號(hào)放大,、濾波和信號(hào)調(diào)整面臨的挑戰(zhàn)
在實(shí)際設(shè)計(jì)上,,接近式感應(yīng)電路可能非常復(fù)雜,目前的設(shè)計(jì)大多采用分立方案實(shí)現(xiàn),,通常會(huì)在光學(xué)接近式傳感器的輸入和輸出加上信號(hào)調(diào)整電路來強(qiáng)化傳感器的能力和相率,,以便在盡可能遠(yuǎn)檢測(cè)距離檢測(cè)到物體,為微控制器提供可靠且適當(dāng)?shù)妮敵鲂盘?hào),。
在輸入端,,由LED發(fā)射器所產(chǎn)生的光脈沖強(qiáng)度基本上由LED的電源大小決定,通常產(chǎn)生電氣脈沖信號(hào)的微控制器并無法提供足夠驅(qū)動(dòng)LED的電流,,因此會(huì)加上如晶體管等的電流放大電路,。
LED長(zhǎng)時(shí)間高電流保護(hù)的重要性,高PSSR:要避免LED導(dǎo)通時(shí)間過長(zhǎng)造成壽命縮短,,我們可以加入長(zhǎng)時(shí)間高電流保護(hù)電路,,這個(gè)電路可以避免LED上出現(xiàn)不必要的長(zhǎng)脈沖寬度。
接近式傳感器的電源輸入電路也必須具備高紋波抑制能力,,以避免因輸入電壓變化所造成的波動(dòng),。
陽(yáng)光和環(huán)境光消除的重要性:環(huán)境光和人工光源,例如白熾燈和熒光燈可能會(huì)影響光二極管檢測(cè)器的靈敏度,,任何由光二極管檢測(cè)器所感應(yīng)到的雜散陽(yáng)光或明亮背光將會(huì)產(chǎn)生不小的持續(xù)直流或低頻尖峰電壓,,另外,由于大部分的陽(yáng)光都包含有一定數(shù)量的紅外光,,因此普通的濾波電路并無法有效地降低噪聲,。
在接近式傳感器輸出上通常會(huì)希望有干凈的光電流輸出,,因此必須在輸出電路上設(shè)計(jì)帶有超窄帶寬特性并匹配目標(biāo)噪聲波長(zhǎng)的復(fù)雜濾波電路以進(jìn)行陽(yáng)光消除,請(qǐng)參考圖3,。
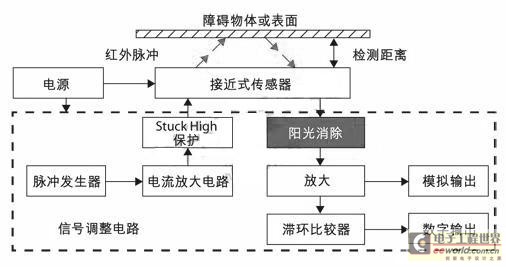
圖3:加入陽(yáng)光消除電路的接近式傳感器工作原理圖,。
信號(hào)放大的重要性:要讓微控制器可靠并適當(dāng)?shù)刈x取,通常微小的輸出光電流必須經(jīng)過放大電路進(jìn)一步放大,。
適當(dāng)信號(hào)形式接口的重要性:在放大后,,輸出光電流信號(hào)可以連接到電流電壓轉(zhuǎn)換電路以提供電壓輸出信號(hào),同樣地,,也可以依目標(biāo)控制功能的形式加入其他電路,,例如滯環(huán)比較器和施密特觸發(fā)器。
印刷電路板占用空間和實(shí)現(xiàn)成本的重要性:通常LED驅(qū)動(dòng)電路,、放大電路和窄帶寬濾波電路采用分立電路設(shè)計(jì),,從而導(dǎo)致PCB費(fèi)用和實(shí)現(xiàn)成本昂貴。
如何選用反射型集成接近式傳感器
集成型光學(xué)接近式傳感器的最重要好處是不用接觸,,由于在傳感器和物體間沒有實(shí)體接觸,,因此可以避免污染。帶魯棒性屏蔽的光隔離可以帶來幾近于零的光學(xué)互擾,、更低的功耗,、更小的尺寸以及優(yōu)化的檢測(cè)距離,從而使得集成反射型傳感器的市場(chǎng)接受度更高,,不過集成型接近式傳感器的檢測(cè)范圍固定,,因此在選擇上就必須依應(yīng)用的形式?jīng)Q定。
通過全方位光學(xué)接近方案加快產(chǎn)品上市速度
安華高科技(Avago Technologies)光學(xué)接近式傳感器方案可針對(duì)各種應(yīng)用提供智能感應(yīng),,該方案包含接近式傳感器和信號(hào)調(diào)整芯片,,完整的方案提供有以下幾個(gè)重要優(yōu)點(diǎn):
* 加強(qiáng)性能和魯棒性
* 適合低功耗應(yīng)用
* 加快產(chǎn)品上市速度
* 提高設(shè)計(jì)靈活度
Avago的APDS-9700是一款通過提供適當(dāng)信號(hào)調(diào)整,例如以足夠電流驅(qū)動(dòng)發(fā)射器并強(qiáng)化傳感器輸出來向微控制器提供適當(dāng)且可靠的連接,,增強(qiáng)光學(xué)傳感器電路性能和魯棒性的ASIC,。除了為物體檢測(cè)系統(tǒng)添加智能外,該芯片同時(shí)還能處理環(huán)境光干擾問題,,而且其小型且緊湊的 QFN封裝(2x2mm)更是有效降低電路板占用空間并節(jié)省外部元器件需求,。
圖4顯示了APDS-9700信號(hào)調(diào)整芯片的功能方塊圖,。
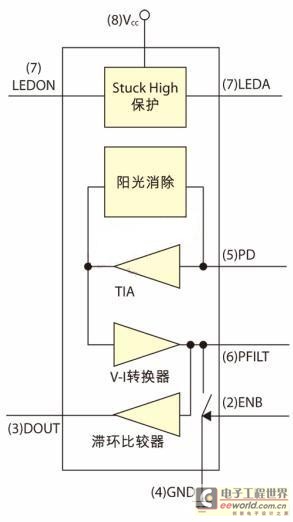
圖4:APDS-9700信號(hào)調(diào)整芯片功能方塊圖,。
使用HSDL-9100和APDS-9700的接近感應(yīng)應(yīng)用電路
圖5為使用Avago APDS-9700信號(hào)調(diào)整芯片搭配Avago HSDL-9100構(gòu)成的接近感應(yīng)應(yīng)用電路參考設(shè)計(jì),在這個(gè)設(shè)計(jì)中,,接近式傳感器的發(fā)射器以脈沖串信號(hào),、掃頻(chirp)信號(hào)或偽隨機(jī)信號(hào)方式送出串行脈沖,通過特定檢測(cè)距離,,并由障礙物體或表面反射回到接收器,。
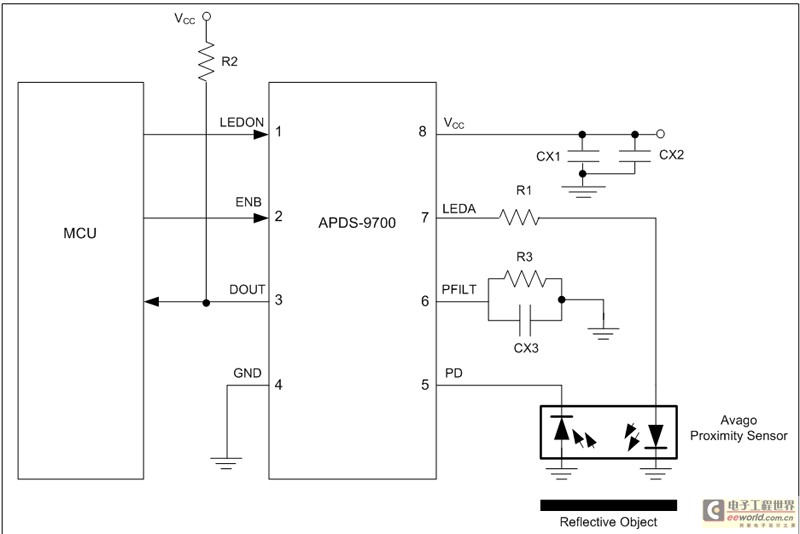
圖5:使用Avago APDS-9700信號(hào)調(diào)整芯片和HSDL-9100接近式傳感器的光學(xué)接近感應(yīng)設(shè)計(jì),。
在這個(gè)設(shè)計(jì)范例中,脈沖由預(yù)編程的微控制器產(chǎn)生,,接著送入APDS-9700的LEDON引腳,。想要適當(dāng)運(yùn)行,脈沖寬度應(yīng)該要大于1μs,。
當(dāng)LEDON引腳上的開關(guān)脈沖由邏輯高電平變成低電平或由低電平變成高電平時(shí),,可能會(huì)在電源Vcc上產(chǎn)生尖峰電壓,主要原因是內(nèi)置的紅外LED驅(qū)動(dòng)電路以高電流工作,,這個(gè)高電流會(huì)受到電感影響形成“彈跳與反彈跳”效應(yīng),,在快速開關(guān)過程中造成尖峰電壓。感應(yīng)的電感值可能由芯片內(nèi)部焊線,、外部測(cè)試探針甚至是連接到電源的導(dǎo)線產(chǎn)生,,由于尖峰電壓可能造成芯片發(fā)生錯(cuò)誤甚至造成損壞,因此加入了CX1和CX2去耦合電容來吸收這些尖峰電壓,,在這個(gè)應(yīng)用中,,建議使用100nF的CX1與6.8μF的CX2。
LEDA是驅(qū)動(dòng)紅外發(fā)射器的輸出引腳,,R1則是用來控制流經(jīng)紅外發(fā)射器電流的限流電阻,,R1阻值越高,流經(jīng)紅外發(fā)射器的電流越小,,對(duì)于物體檢測(cè)距離較短的部分應(yīng)用,,并不需要高電流,降低流經(jīng)發(fā)射器的電流有助于降低電源電壓的尖峰電壓,。
光檢測(cè)器的陰極則直接連接到APDS-9700的PD引腳,。
電阻R3和電容CX3并聯(lián)并連接到PFILT引腳,形成產(chǎn)生輸出電壓VPFILT的積分電路,,由內(nèi)部電壓電流轉(zhuǎn)換器所提供的電流通過這個(gè)積分電路以特定時(shí)間常數(shù)進(jìn)行充放電動(dòng)作,。
PFILT模擬輸出引腳可以連接到微控制器的模數(shù)轉(zhuǎn)換器,將持續(xù)變化的電壓轉(zhuǎn)換成為二進(jìn)制數(shù)字形式,,這些二進(jìn)碼可以在PC,、LED或LCD面板上顯示檢測(cè)距離。
除了提供PFILT引腳的輸出電壓外,,積分電壓VPFILT同時(shí)也連接到滯環(huán)比較器的輸入,,當(dāng)滯環(huán)比較器的輸入到達(dá)預(yù)先設(shè)定的參考閥值電壓VTH時(shí),會(huì)在輸出產(chǎn)生邏輯高電平到低電平的變化,,否則會(huì)產(chǎn)生低電平到高電平變化,,因此光二極管檢測(cè)器輸出的改變會(huì)在DOUT引腳上以數(shù)字輸出呈現(xiàn),由于DOUT是一個(gè)開集引腳,,因此需要在DOUT上連接一個(gè)上拉電阻R2到電源Vcc,。
DOUT數(shù)字輸出引腳可以連接到微控制器,、LED或開關(guān),以便提供是否感應(yīng)到物體的狀態(tài),。
APDS-9700擁有ENB引腳,,可以讓使用者在器件不需工作時(shí)關(guān)閉芯片以節(jié)省功耗,當(dāng)ENB引腳為高電平時(shí),,器件將關(guān)閉,,當(dāng)ENB引腳為低電平時(shí)器件將啟動(dòng)并回復(fù)正常工作,這些動(dòng)作可以使用狀態(tài)機(jī)實(shí)現(xiàn),,而動(dòng)作的順序則可以通過微控制器編程進(jìn)行控制,。