
納型衛(wèi)星是指質(zhì)量在1~10kg 之間的衛(wèi)星,。與微型衛(wèi)星相比, 納型衛(wèi)星對遙感系統(tǒng)在質(zhì)量,、體積、功耗等方面的要求更加苛刻,。目前廣泛用于微型衛(wèi)星遙感系統(tǒng)的電荷耦合器件CCD很難滿足納型衛(wèi)星的使用要求,。CMOS圖像傳感器采用標準的CMOS 技術, 繼承了CMOS 技術的優(yōu)點, 如靜態(tài)功耗低、動態(tài)功耗與工作頻率成比例,、噪聲容限大,、抗干擾能力強、特別適合于噪聲環(huán)境惡劣條件下工作,、工作速度較快,、只需要單一工作電源等。雖然 CMOS 器件的研究還未完全成熟, 如電離環(huán)境下暗電流稍大等問題還沒有很好地解決,還不能完全取代CCD, 但不可否認CMOS 器件將是未來遙感傳感器的發(fā)展方向,。本文設計了一套納型衛(wèi)星CMOS 遙感系統(tǒng), 并對其進行了熱循環(huán)實驗研究,。
1 納型衛(wèi)星遙感系統(tǒng)的設計
1. 1 遙感系統(tǒng)總體設計
納星遙感系統(tǒng)如圖1 所示, 包括鏡頭、CMOS圖像傳感器,、現(xiàn)場可編程門陣列FPGA,、靜態(tài)隨機存儲器SRAM 和微控制器5 部分。

圖1 納星遙感系統(tǒng)框圖
1. 2 光學系統(tǒng)設計
1) 焦距設計
遙感相機光學系統(tǒng)的原理如圖2 所示,。圖中用一個透鏡代表實際光學系統(tǒng)的透鏡組, 示意了視場中地面景物的最小可分辨單元在成像面上產(chǎn)生一個相應的點,。對于衛(wèi)星遙感相機的光學系統(tǒng), 因為成像物距等于衛(wèi)星軌道高度h, 相對于焦距f 來說可認為是無窮遠, 所以可認為光線都是近軸的平行光,。這些近軸平行光通過光學系統(tǒng)的透鏡組后, 匯聚在透鏡組的焦平面上,。因此, 從透鏡組中心到焦點的距離, 焦距將大體上決定聚光系統(tǒng)的長度, 而光學系統(tǒng)的理論分辨率則主要由光學孔徑D決定。

圖2 光學系統(tǒng)原理圖
在實際設計中, 焦距通常是根據(jù)地面分辨率和圖像傳感器的大小通過下式來確定的:

式中: h為衛(wèi)星到地面的距離, rd為CMOS圖像傳感器探測面半徑, R為相機成像覆蓋半徑,。
2) 光學孔徑設計
為保證成像器件探測面獲得足夠的曝光量, 根據(jù)遙感光學系統(tǒng)的經(jīng)驗計算相機光學系統(tǒng)的光圈數(shù):

實際設計中, 一般取F≤4~5,。
遙感相機光學系統(tǒng)可近似為望遠鏡系統(tǒng), 其最小分辨角, 即望遠鏡分辨率, 可用剛好能分辨開的兩物點對系統(tǒng)的張角θr 表示, 根據(jù)望遠鏡分辨率和Rayleigh 衍射判據(jù)有如下計算式:

式中λ為中心波長。光學系統(tǒng)在平坦地面上的理論分辨率為

式中θt為地物中心對光學系統(tǒng)的張角,。
設計中應綜合考慮式(2) 和(4) 的結(jié)果, 選定的設計參數(shù)在保證遙感系統(tǒng)獲得足夠光照的情況下,要同時滿足設計分辨率的要求,。
1. 3 電子系統(tǒng)設計
考慮到星地相對運動速度, 每幅圖像的曝光時間約為幾毫秒, 故設計中采用現(xiàn)場可編程門陣列(FPGA ) 對CMOS 圖像傳感器進行時序控制, 并將輸出的圖像數(shù)據(jù)保存到SRAM 中。當需要傳輸圖像的時候, 由FPGA 將保存在SRAM 中的圖像數(shù)據(jù)讀出, 通過CAN總線傳至星上數(shù)據(jù)處理系統(tǒng),。
1) 器件選型
CMOS圖像傳感器按照像元電路可分為無源像素傳感器(PPS) 和有源像素傳感器(APS),。目前國際上能夠買到的分辨率達到106級以上的CMOS圖像傳感器并不多, 價格差異也很大, 設計中應根據(jù)CMOS 圖像傳感器的光學要求和市場狀況綜合選型,。為保證成像質(zhì)量, 納型衛(wèi)星上宜選用CMOS 有源像素傳感器。
FPGA根據(jù)實現(xiàn)技術機理的不同, 可分為反熔絲型,、EPROM或EEPROM型,、Flash型、SRAM型等幾種,。根據(jù)航天器件要求, FPGA 控制器件宜選擇反熔絲型FPGA 產(chǎn)品,。選擇SRAM 時, 主要考慮圖像數(shù)據(jù)量要求以及SRAM的數(shù)據(jù)端口位數(shù)、存取時間,、工作溫度,、功耗等因素。
CAN 總線接口的主要任務是接收星上數(shù)據(jù)處理模塊發(fā)來的命令, 完成對相機的相關監(jiān)控, 將獲得的圖像數(shù)據(jù)分時發(fā)送給星上數(shù)據(jù)處理模塊,。本文選用的微處理器在MCS251 系列單片機的基礎上集成了CAN 控制器, 既可以實現(xiàn)對遙感系統(tǒng)簡單的監(jiān)控功能, 又可以方便地實現(xiàn)CAN 通訊功能,。
2) FPGA 控制器設計
作為相機成像模塊的控制核心, FPGA 負責產(chǎn)生所有重要的控制時序, 包括產(chǎn)生CMOS 圖像傳感器的工作時序, 把讀出CMOS 圖像傳感器數(shù)據(jù)存到SRAM 中; 將存放在SRAM 中的圖像數(shù)據(jù)分時輸出。整個FPGA 的傳輸模型如圖3 所示,。

圖3 FPGA 設計模型圖
FPGA 對CMOS 圖像傳感器的成像控制如狀態(tài)轉(zhuǎn)換圖4 所示,。當系統(tǒng)啟動后, FPGA 先向CMOS 圖像傳感器發(fā)出芯片復位指令, 芯片復位完成后, 讓Reset 指針沿著像素矩陣逐行移動, 而使Read 指針保持在初始位置(第0行) , 進行讀前行復位。當Reset 指針到達某一目標行, 其間所間隔的時間滿足積分時間時, 即開始激活Read 指針, 并開始移動Read 指針, 進行讀取,。如此循環(huán)交替移動兩個指針, 不斷進行讀間行復位,、行讀取、讀間等待, 即可保證整個像素陣列各行都符合所要求的積分時間,。
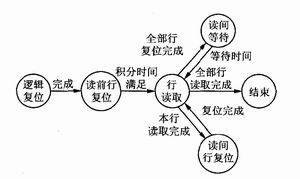
圖4 FPGA 狀態(tài)轉(zhuǎn)換圖
3) CAN 總線接口設計
CAN 總線接口的主要任務是接收星上數(shù)據(jù)處理模塊發(fā)來的命令, 監(jiān)控遙感相機模塊的工作狀態(tài),包括遙感相機模塊的電源控制,、電流監(jiān)測、溫度監(jiān)測,、曝光時間控制等功能, 并將獲得的圖像數(shù)據(jù)分時發(fā)送給星上數(shù)據(jù)處理模塊,。設計上, 星上數(shù)據(jù)處理模塊發(fā)來的指令會使微控制器進入中斷, 設置相應的標志。微控制器查詢各標志的變化, 根據(jù)星上CAN通訊協(xié)議完成相關動作, 包括監(jiān)測遙感模塊工作溫度,、工作電流, 設置曝光時間, 進行圖像數(shù)據(jù)傳輸?shù)炔僮鳌?/p>
2 納型衛(wèi)星遙感系統(tǒng)的熱循環(huán)實驗
2. 1 實驗系統(tǒng)及方案
為了方便完成在設計階段的單模塊調(diào)試, 實現(xiàn)遙感系統(tǒng)地面原理與性能測試, 本文采用PC機模擬星上數(shù)據(jù)處理系統(tǒng), 利用CAN 卡將CMOS 相機與PC機相連, 建立了一套CMOS遙感系統(tǒng)地面測試系統(tǒng),。
本文采用德國Vtsch IndustrietechnikVT7034 型恒溫實驗箱, 在60~- 5℃溫度區(qū)間內(nèi),每下降5℃采集一組暗圖像。熱循環(huán)實驗之所以按照從高溫到低溫的順序進行, 是因為實驗所用恒溫箱不能抽真空,。如果反過來進行實驗, 盡管不斷向恒溫箱內(nèi)充氮氣, 箱內(nèi)微量空氣中的水氣仍可能凝結(jié)在相機上, 影響實驗結(jié)果,。
2. 2 特征參數(shù)的提取
1) 平均暗輸出
平均暗輸出是在沒有光照的條件下圖像傳感器輸出的平均灰度值, 可由下式進行計算:

其中: I i,j是圖像傳感器在無光照條件下輸出的暗圖像灰度值矩陣, M 、N 是圖像傳感器像素陣列的行數(shù)和列數(shù),。
2) 暗不一致性
理想情況下, 在無光照的時候圖像傳感器的輸出也應該是均勻的,。但是圖像傳感器的像素間總是存在差異的, 因此暗輸出總有波動。波動的大小表明圖像傳感器像素性能的穩(wěn)定性, 計算方法是求出暗圖像各像素輸出灰度值的標準差

其中各符號的含義與暗噪聲計算式(5) 相同,。
2. 3 實驗結(jié)果及分析
按照2. 1 所述的方案進行實驗, 得到了CMOS相機在60~- 5 ℃溫度區(qū)間內(nèi)平均暗輸出以及暗不一致性隨溫度的變化曲線, 分別如圖5,、圖6 所示。
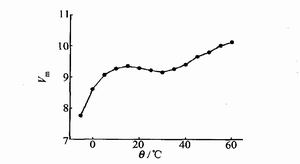
圖5 平均暗輸出隨溫度的變化曲線

圖6 暗不一致性隨溫度的變化曲線
從圖中可以看出, 平均暗輸出隨著溫度的升高大致呈上升趨勢,。當溫度小于10 ℃時, 平均暗輸出上升速度較快;10~ 15 ℃上升趨緩;從15 ℃開始略有下降,到30 ℃時達到低谷,10~30℃之間,總的來說平均暗輸出值變化比較平穩(wěn); 30 ℃以上, 平均暗輸出值又以較快的速度上升,。本文選用的CMOS圖像傳感器為256 級灰度輸出, 實驗中平均暗輸出的變化范圍為7.7567~10.1092,。
平均暗輸出之所以隨著溫度的升高大致呈上升趨勢, 是因為溫度升高, CMOS圖像傳感器及其外圍電子器件的熱噪聲都會升高; 而平均暗輸出在10~30 ℃之間變化比較平穩(wěn), 甚至在15~30 ℃之間略有下降, 是因為CMOS圖像傳感器在設計上的特殊考慮保證了其在常溫下具有最優(yōu)的工作性能;這同時也說明了這套遙感系統(tǒng)的電噪聲主要來源于CMOS圖像傳感器。
暗不一致性隨溫度的變化不大, 實驗中其變化范圍為0.6148~0.8542,比平均暗輸出低一個數(shù)量級, 可以忽略,。
實驗中還測試了CMOS相機的耐低溫性能,。關機后將相機降溫至- 25 ℃,達到溫度平衡后再升溫至0 ℃,開機采集圖像, 分析其性能變化。實驗測得經(jīng)受低溫后, CMOS相機在0℃下的平均暗輸出為7.2323, 比先前略有降低; 暗不一致性為0.8781,比先前略有增大,。由于實驗中暗不一致性始終比平均暗輸出低一個數(shù)量級, 其變化相對平均暗輸出可以忽略, 所以這個結(jié)果說明關機狀態(tài)下低溫環(huán)境不會對CMOS相機的成像質(zhì)量產(chǎn)生顯著的不良影響,。綜上所述, 本文設計的這套CMOS遙感相機在10~30℃之間平均暗輸出變化平穩(wěn), 暗不一致性可以忽略,有利于對成像質(zhì)量的控制和校正,是理想的成像溫度范圍。
3 結(jié)論與展望
本文設計了一套納型衛(wèi)星CMOS遙感系統(tǒng), 體積為62mm×62mm×35mm,功耗小于0.6W, 質(zhì)量小于150g,采用10μm像素尺寸,、1024×1024像素數(shù)目的CMOS圖像傳感器, 光譜響應范圍為400~800nm,配合焦距為50mm的鏡頭,在800km的太陽同步軌道上,可以實現(xiàn)大于150km×150km的地面覆蓋面積和優(yōu)于 160m 的地面分辨率,適于納型衛(wèi)星獲取多光譜和彩色的普查信息,。熱循環(huán)實驗表明, 該CMOS遙感相機能夠耐受空間環(huán)境中- 25~60 ℃的衛(wèi)星艙內(nèi)溫度變化, 在10~30 ℃的溫度范圍內(nèi)工作穩(wěn)定,可通過地面測試數(shù)據(jù)對其在空間獲取的圖像進行校正補償。
由于國際上對CMOS圖像傳感器在航天領域的應用研究較少, 所以設計出來的CMOS相機在上天之前, 還需要研究其熱真空性能和抗輻照性能, 提出相應的補償,、加固措施,。