
引言
隨著電力電子全控型開(kāi)關(guān)器件的出現(xiàn)和發(fā)展,脈寬調(diào)制技術(shù)(PWM)在電力電子變流技術(shù)中獲得了廣泛的應(yīng)用。相比較于硬件實(shí)現(xiàn)方法,采用軟件計(jì)算的實(shí)時(shí)PWM控制策略已被接受,并出現(xiàn)了許多不同的PWM波的發(fā)生方法,如采樣SPWM法、諧波注入PWM法、均值PWM法、等面積PWM法等。更有將逆變器與負(fù)載作為整體建立PWM控制策略的方法,如電動(dòng)機(jī)變頻調(diào)速領(lǐng)域常用的基于電動(dòng)機(jī)氣隙磁通軌跡最圓的磁通軌跡法PWM控制、基于電動(dòng)機(jī)電磁轉(zhuǎn)矩自調(diào)整的PWM控制、基于狀態(tài)方程和輸出反饋信號(hào)推算的無(wú)差拍PWM控制等[1]。
文獻(xiàn)[2]推導(dǎo)了基于整流器網(wǎng)側(cè)電流矢量推導(dǎo)出同步旋轉(zhuǎn)坐標(biāo)系下PWM整流器的數(shù)學(xué)模型,詳細(xì)介紹了基于電流前饋解耦的PWM整流器雙環(huán)控制系統(tǒng)設(shè)計(jì)方法,并應(yīng)用TMS320LF2407A建立了PWM整流器的DSP數(shù)字化系統(tǒng);文獻(xiàn)[3]針對(duì)大功率應(yīng)用場(chǎng)合的單相PWM整流器,探討了一種適用于單相PWM整流器的網(wǎng)側(cè)電流3次諧波抑制方法,分析了單相PWM整流器的工作原理和網(wǎng)側(cè)電流的3次諧波產(chǎn)生原因,并將該新型諧波抑制方法與常規(guī)控制算法進(jìn)行了分析對(duì)比。文獻(xiàn)[4]依據(jù)沖量效果不變理論,給出了采用直接面積等效法計(jì)算三相SPWM波的方法,并進(jìn)行了基于FPGA的發(fā)生器軟、硬件設(shè)計(jì),取得了較
好的變頻調(diào)速效果。
等面積PWM法
等面積PWM法的基本思想是使相同時(shí)間間隔內(nèi)的PWM波的面積與調(diào)制波的面積相等[1],正弦波等面積PWM法的調(diào)制原理為:假定一個(gè)周期內(nèi)PWM波的脈沖數(shù)為2N,將參考正弦波的整個(gè)周期T分為2N等分,則每個(gè)區(qū)間的長(zhǎng)度為,在第i個(gè)區(qū)間正弦波的面積為:
![]()
設(shè)輸出PWM波的幅值為Ud, 采用雙極性調(diào)制后,第i個(gè)區(qū)間內(nèi)的PWM波形平均值為:
![]()
考慮到有,令,由式(1)、式(2)整理可得:

令,![]() ,式中為調(diào)制深度。
,式中為調(diào)制深度。
的表達(dá)式中雖包含有三角函數(shù)的計(jì)算,但它僅與N有關(guān),一旦N確定后,可實(shí)現(xiàn)將計(jì)算好的存入內(nèi)存中,需要時(shí)通過(guò)查表方式獲取即可。從k的表達(dá)式可以看出,k正比于調(diào)制深度而反比于基波頻率。對(duì)于通用型交流變頻調(diào)速系統(tǒng)來(lái)說(shuō),通常使為常數(shù)來(lái)達(dá)到恒轉(zhuǎn)矩控制,若用等面積PWM調(diào)制實(shí)現(xiàn)時(shí),此時(shí)只需使k值為一個(gè)常數(shù)即可。
綜合上述分析,等面積PWM法的脈沖換相點(diǎn)計(jì)算公式為:
由于等面積PWM法生成的PWM波形在處是點(diǎn)對(duì)稱的,因而可推導(dǎo)出

等面積PWM法具有算法簡(jiǎn)單、占用內(nèi)存少、產(chǎn)生的PWM波形對(duì)稱等優(yōu)點(diǎn),并且PWM波脈寬與調(diào)制深度M存在一定的線性關(guān)系,易于實(shí)現(xiàn)變頻調(diào)速的恒壓頻比控制。
PWM發(fā)生器的設(shè)計(jì)要求
對(duì)于變頻器來(lái)說(shuō),采用微機(jī)生成PWM波時(shí),必須事先確定好載波比N(或者2N)。如果頻率變化較大,那么在整個(gè)頻率范圍內(nèi)采用同一個(gè)載波比的同步調(diào)制方案,難以兼顧高頻和低頻輸出時(shí)的性能。針對(duì)于此,最常采用的方法是分段同步調(diào)制,即在不同的頻率段選擇不同的載波比,使變頻器在整個(gè)頻率變化范圍內(nèi),都有一個(gè)較為合理的PWM開(kāi)關(guān)頻率,以獲得較好的性能。載波比的選擇和切換必須注意以下兩點(diǎn):切換時(shí)不出現(xiàn)電壓的突變;在各切換臨界點(diǎn)處需設(shè)置一個(gè)滯環(huán)區(qū),以避免輸出頻率落在臨界切換點(diǎn)附近時(shí)造成載波頻率反復(fù)變化而引起的震蕩現(xiàn)象[1]。
橋臂互鎖和死區(qū)時(shí)間,逆變器同一橋臂上下兩管的驅(qū)動(dòng)信號(hào)必須互鎖通斷以防止橋臂直通而發(fā)生斷路,而且兩驅(qū)動(dòng)信號(hào)間必須留有一定的死區(qū)時(shí)間,以防止一管還未完全關(guān)斷時(shí)另一管便開(kāi)始導(dǎo)通的短路故障。此要求可以在單片機(jī)PWM波的計(jì)算程序中加以考慮。
初始狀態(tài)及故障封鎖,任何款式型號(hào)的CPU,工作前總存在復(fù)位狀態(tài),此時(shí)CPU各I/O輸出口為全“1”或全“0”,設(shè)計(jì)時(shí)應(yīng)避免在此復(fù)位狀態(tài)時(shí)造成所有開(kāi)關(guān)管都被驅(qū)動(dòng)導(dǎo)通的危險(xiǎn),因此應(yīng)將CPU復(fù)位時(shí)的初始電平值設(shè)置成開(kāi)關(guān)管驅(qū)動(dòng)信號(hào)無(wú)效狀態(tài)。此外,當(dāng)發(fā)生故障時(shí),也可以通過(guò)輸出故障封鎖信號(hào)來(lái)關(guān)閉驅(qū)動(dòng)信號(hào)[1]。
實(shí)際設(shè)計(jì)PWM控制器時(shí),還應(yīng)考慮滿足一般變頻系統(tǒng)的要求[5]。對(duì)交流變頻調(diào)速而言,PWM控制器提供逆變器的觸發(fā)信號(hào),而控制對(duì)象是交流異步電動(dòng)機(jī),具體來(lái)說(shuō)應(yīng)考慮:①逆變器的要求。在保證橋臂互鎖和死區(qū)時(shí)間的同時(shí),為減少逆變器器件的開(kāi)關(guān)損耗,應(yīng)合理選擇控制器輸出的開(kāi)關(guān)頻率。②異步電機(jī)的要求。低頻時(shí),應(yīng)考慮對(duì)電機(jī)定子繞組的補(bǔ)償系數(shù);變頻過(guò)程應(yīng)使電壓相位平滑轉(zhuǎn)換以保證電機(jī)氣隙內(nèi)磁場(chǎng)能連續(xù)旋轉(zhuǎn);可逆旋轉(zhuǎn)時(shí),應(yīng)先降速到最低頻率,然后送出逆序電壓,再升頻到指定值。另外,整個(gè)變頻過(guò)程還應(yīng)設(shè)置合適的頻率變化率,使得電機(jī)的動(dòng)態(tài)工作點(diǎn)選在其機(jī)械特性的直線段,使頻率的變化率與電機(jī)轉(zhuǎn)速的跟隨相適應(yīng)。③改善調(diào)速性能的要求。本文采用有級(jí)同步式控制,即把調(diào)頻范圍劃分為7個(gè)頻段,每個(gè)頻段內(nèi)雖然頻率以相同級(jí)差變化,但頻率比P不變,所以輸出的脈沖數(shù)不變。而各頻段之間,輸出的脈沖數(shù)則隨輸出頻率的減低而增多,這就既保持了輸出波形正、負(fù)半周完全對(duì)稱,也改善了低頻輸出特性,從而就改善了電機(jī)的運(yùn)行性能。
PWM控制器的硬、軟件實(shí)現(xiàn)
系統(tǒng)硬件實(shí)現(xiàn)
圖1為PWM波控制的變頻調(diào)速系統(tǒng)原理框圖[1]。
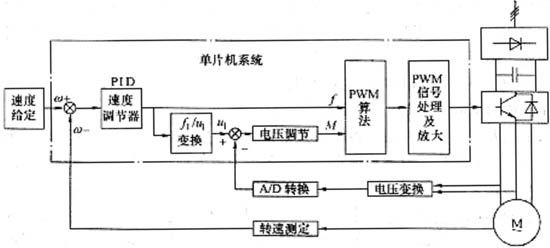
圖1 變頻調(diào)速系統(tǒng)原理框圖
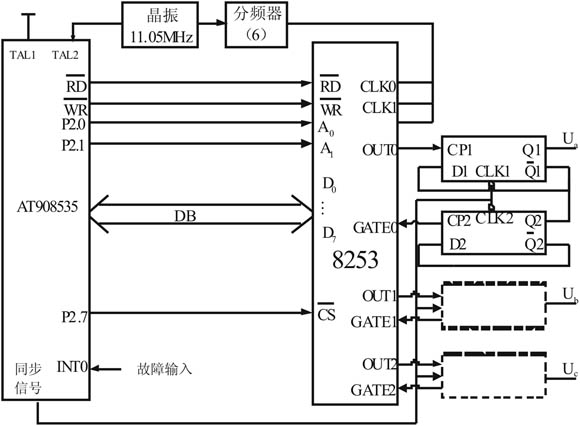
圖2 三相PWM波發(fā)生器原理圖
控制器采用AVR單片機(jī)AT90S8535,為滿足本文提出的設(shè)計(jì)要求,單片機(jī)的資源分配如下:39引腳的PA1作為A/D采樣輸入口,采樣輸出頻率;17引腳的INT1外部中斷作為電路故障信號(hào)(包括過(guò)電流、過(guò)電壓、短路)的輸入引腳,該引腳也作為“解除封鎖”控制位的輸入引腳,其作用在于:當(dāng)故障發(fā)生時(shí),由外部中斷輸入引腳的信號(hào)變化向CPU提出中斷請(qǐng)求,CPU響應(yīng)中斷,在執(zhí)行中斷服務(wù)程序中輸出PWM封鎖信號(hào)并實(shí)現(xiàn)閉鎖,直到解除閉鎖控制位有效時(shí),才撤銷PWM封鎖信號(hào),使PWM波能夠正常輸出。由于AT90S8535芯片復(fù)位時(shí)端口的初始狀態(tài)是“高”,因此封鎖信號(hào)的驅(qū)動(dòng)信號(hào)均設(shè)置成“低”電平為無(wú)效狀態(tài),此時(shí)端口輸出信號(hào)使所有功率開(kāi)關(guān)管處于關(guān)斷狀態(tài)。由于計(jì)算PWM換相所需的開(kāi)關(guān)數(shù)據(jù)是三相的,因而需要三個(gè)PWM波換相定時(shí)器,再加上載波周期定時(shí)器,共需要4個(gè)定時(shí)器。由于該單片機(jī)沒(méi)有4個(gè)定時(shí)器資源,所以需要單片機(jī)外部擴(kuò)展一片具有三個(gè)獨(dú)立通道的可編程計(jì)數(shù)/定時(shí)器8253芯片組成三相PWM發(fā)生器,其擴(kuò)展的硬件連接如圖2所示。
系統(tǒng)軟件實(shí)現(xiàn)
主程序主要完成:各接口芯片的初始化,給相應(yīng)內(nèi)存單元賦初值,根據(jù)口輸入狀態(tài)判正、反轉(zhuǎn),升、降速并把判斷結(jié)果記錄在用戶設(shè)置的標(biāo)志寄存器中備用。然后分別調(diào)用變頻子程序和計(jì)算子程序,算出產(chǎn)生三相PWM波所需的定時(shí)時(shí)間并暫存。在此過(guò)程中,由于中斷一直開(kāi)放,所以不影響PWM波的實(shí)時(shí)產(chǎn)生,其流程圖如圖3所示。
中斷處理程序中:故障中斷主要用于關(guān)A、B、C三相橋臂,封鎖逆變器輸出,送出報(bào)警信號(hào),然后返回。A、B、C三相中斷服務(wù)程序則完成相應(yīng)橋臂的觸發(fā)信號(hào)輸出,裝入新的時(shí)間常數(shù),進(jìn)行中斷計(jì)數(shù)等。由于該過(guò)程三相基本相同,圖4給出了B相的中斷處理程序流程,其中載波周期中產(chǎn)生B相脈沖波形。
這種以單片機(jī)為基礎(chǔ)的PWM控制器,硬件簡(jiǎn)單、可靠、軟件靈活、易變,可輸出較好的PWM波形,能滿足一般變頻調(diào)速系統(tǒng)的要求,特別是利用單片機(jī)串行通訊,可十分方便地組成閉環(huán)系統(tǒng)。
結(jié)語(yǔ)
分析了常見(jiàn)的PWM波算法;分析了等面積PWM法用于交流變頻調(diào)速系統(tǒng)時(shí),使壓頻比為常數(shù)來(lái)達(dá)到恒轉(zhuǎn)矩控制的簡(jiǎn)單實(shí)現(xiàn);詳細(xì)深入地介紹了等面積PWM法在單片機(jī)控制器中的硬件和軟件實(shí)現(xiàn)方法。