
0 引言
感應(yīng)加熱電源的調(diào)功方法有很多,在進一步提高功率和逆變器的工作頻率時,一般選擇在整流側(cè)調(diào)功。而斬波調(diào)功在直流電壓下工作,供電功率因數(shù)高,對電網(wǎng)的諧波干擾小,電路的工作頻率高,而且與逆變器控制分開,使得系統(tǒng)更加穩(wěn)定可靠,故適用于電壓型逆變器使用。
在斬波調(diào)功的感應(yīng)加熱電源中,逆變電源的功率控制主要是轉(zhuǎn)化為Buck斬波器的功率控制,即通過改變Buck斬波器的驅(qū)動脈沖來調(diào)節(jié)輸出電壓,從而調(diào)節(jié)電源的輸出功率。但是Buck斬波器輸出電壓可能有偏差,環(huán)路設(shè)計就變成一項很重要的工作,它關(guān)系到電路的穩(wěn)定性、響應(yīng)速度、動態(tài)過沖等指標。本文在分析基于功率控制的Buck斬波器的小信號模型和反饋控制模式的基礎(chǔ)上,探討了反饋控制的傳遞函數(shù)和環(huán)路參數(shù)的設(shè)計。
1 基于功率控制的Buck變換器分析
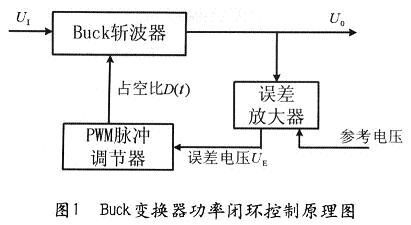
如圖1所示,Buck變換器的功率控制包括3個部分,Buck斬波器、誤差放大器和PWM脈沖調(diào)節(jié)器,其中,Buck斬波器反映了電源本身的特性,通過建模的方法可以分析其輸入到輸出、控制到輸出的特性;誤差放大器和PWM脈沖調(diào)節(jié)器構(gòu)成反饋環(huán)節(jié),誤差放大器實質(zhì)上是一個補償網(wǎng)絡(luò),將給定信號與輸出信號的差值放大,通過PWM脈沖調(diào)節(jié)器調(diào)節(jié)占空比D(t)最終可以調(diào)節(jié)輸出電壓UO,使輸出穩(wěn)定在給定值上。
 |
整個功率控制環(huán)的設(shè)計可以等價為對Buck斬波器控制器設(shè)計,因此必須首先建立控制對象——Buck斬波器的在電感電流連續(xù)(C CM)模式下的小信號模型。
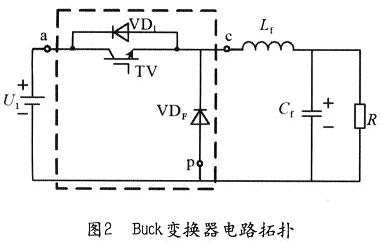
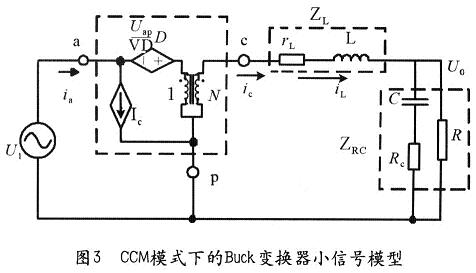
圖2為設(shè)定Buck電路工作于電感電流連續(xù)狀態(tài)(C CM),應(yīng)用三端PWM平均模型方法,并考慮電感電阻rL和電容RC(ESR),見圖3。圖2中虛線框內(nèi)部分為三端PWM模型,由開關(guān)管VT、二極管VDF和續(xù)流二極管VD組成,其中,ia和ic分別代表ia(t)、ic(t)的平均變量,Uap和Ucp分別代表 Uap(t)、Ucp(t)平均變量,其中ia(t)和ic(t)為流入a端和流出c端的電流瞬時變量,Uap(t)和Ucp(t)為端口ap和cp的電壓瞬時變量,它們是時間的函數(shù)。將主開關(guān)管等效成受控電流源形式,二極管VDF等效成受控電壓源形式,由此可以得出如圖3中虛線所示的三端PWM7開關(guān)模型。
 |
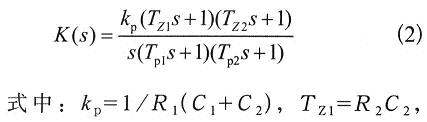
當(dāng)不考慮電感內(nèi)阻(通常可省略)時,可以得到Buck變換器占空比到輸出的傳遞函數(shù)為:
RC——濾波電容的ESR
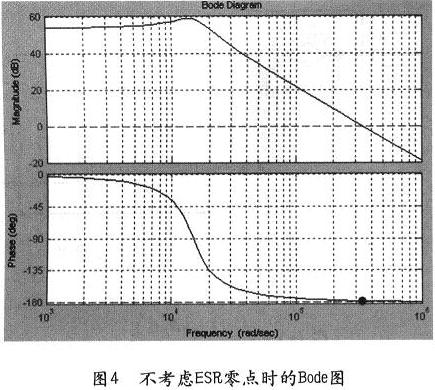
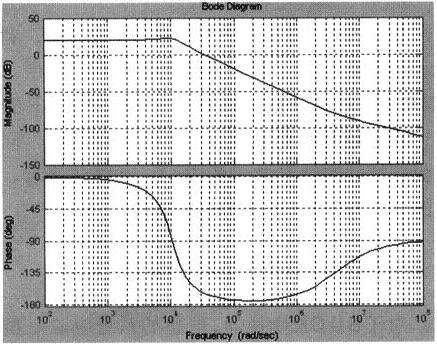
根據(jù)得到的Buck變換器的小信號模型,利用Matlab軟件分析了其頻率特性如圖4和圖5所示。圖4和圖5對比分析可以看出,受高頻ESR的影響,在穿越頻率處又產(chǎn)生一個相位滯后角,同時使幅頻特性的斜率由-2變成-1。從整體來看,系統(tǒng)的低頻增益低,相角裕度ψ<45°。
 |
 |
 |
|
|
所以整個閉環(huán)系統(tǒng)的開環(huán)傳遞函數(shù)是:
 |
式中:K2(s)-PWM調(diào)制調(diào)制器傳遞函數(shù),其傳遞函數(shù)k2(s)=1/Um,其中Um為鋸齒波最大振幅。
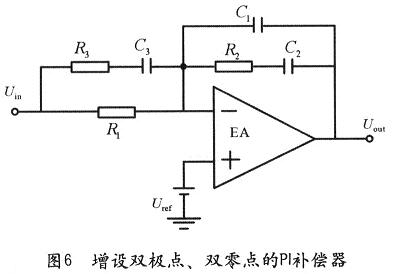
本文用Matlab軟件設(shè)計了具有雙零點、雙極點的PI控制器,并對設(shè)計結(jié)果進行了仿真驗證。根據(jù)Bode定理,補償網(wǎng)絡(luò)加入后的回路增益應(yīng)滿足幅頻漸進線以-20dB/dec的斜率穿過剪切點(ωc點),并且至少在剪切頻率左右2ωc的范圍內(nèi)保持此斜率不變。
 |
由此要求,首先選擇剪切頻率。實際應(yīng)用中,選fc=fs/5為宜,其中fs為斬波器工作頻率或開關(guān)管的開關(guān)頻率。具體斬波器中,開關(guān)頻率為50kHz,則fc=50/5=10kHz。
如圖7中所示,未加補償網(wǎng)絡(luò)之前系統(tǒng)在fc=10kHz處的增益為-11.4dB,斜率為-40dB/d ec,所以,補償網(wǎng)絡(luò)應(yīng)滿足如下條件:在fc=10kHz處的增益為11.4dB,斜率為+200dB/dec,并保持此斜率在至少2ωc的范圍內(nèi)不變。取兩個零點位于諧振頻率附近,以抵消斬波器的2個極點(零點+2斜率補償極點-2斜率,并補償其相位滯后);令一個極點p1抵消斬波器的ESR零點:fp1≈fz,設(shè)置一個高頻極點p2,fp2≈(5~10)fc,使高頻段增益降低,以抑制高頻噪聲。根據(jù)以上要求,可以按如下方案設(shè)計:fz1=fz2=1.33kHz,fp1=7.96kHz,fp2=100kHz,kp=3250則所設(shè)計的P I補償器的參數(shù)如下:取R 1=5 0k Ω,R 2=1 9.6k Ω,R3=0.8 8k Ω,C1=50pF,C 2=6.1nF,C3=2.36nF。實際電路中,取R1=.50kΩ,R 2=20kΩ,R 3=0.88kΩ,C1=50pF,C2=6.2nF,C3=2.2nF。
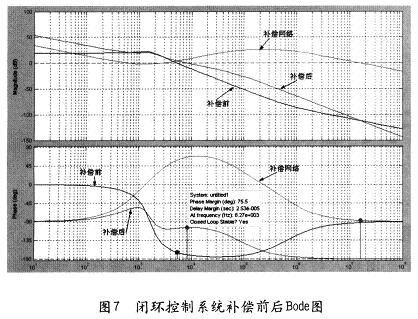 |
從圖7中可以看出,增加PI補償器后,系統(tǒng)補償后低頻增益提高,中頻帶寬增大,并以-20dB/dec的斜率穿越零分貝線;系統(tǒng)截止頻率近似為1OkHz,與設(shè)計期望值相同;高頻衰減迅速,很好地提高了系統(tǒng)抗干擾性能;補償后的相位裕度達到了75°。
4 結(jié)束語
對于高頻感應(yīng)加熱電源廣泛應(yīng)用的Buck斬波調(diào)功電路,設(shè)計了雙極點、雙零點補償電路,補償后的系統(tǒng)不僅提高了系統(tǒng)響應(yīng)速度,而且消除了穩(wěn)態(tài)誤差,系統(tǒng)性能明顯提高。實驗結(jié)果證明了這種補償電路的實用性和有效性,對高頻感應(yīng)加熱電源的改進和研究具有很好的參考價值。
發(fā)布者:博子