
1 引言
目前工業(yè)生產(chǎn)中普遍采用的PWM變頻調(diào)速屬于精型調(diào)速。而對(duì)風(fēng)機(jī)、泵類(lèi)負(fù)載采用變頻調(diào)速,其逆變器功率為全功率。若采用串級(jí)調(diào)速方法,則其逆變器功率僅僅為全功率的1/2~l/3。串級(jí)調(diào)速系統(tǒng)還具有裝置安全、可靠性高的優(yōu)點(diǎn)。即使串級(jí)調(diào)速逆變裝置萬(wàn)一出現(xiàn)故障,異步電動(dòng)機(jī)也能完全脫離串級(jí)調(diào)速裝置轉(zhuǎn)換到轉(zhuǎn)子短接全速運(yùn)行。但傳統(tǒng)串級(jí)調(diào)速方法存在一個(gè)突出的缺點(diǎn),就是系統(tǒng)功率因數(shù)較低,高速滿(mǎn)載運(yùn)轉(zhuǎn)時(shí)總功率因數(shù)約0.6,低速時(shí)總功率因數(shù)更差。從節(jié)約能源的角度考慮,需要尋找方法提高串級(jí)調(diào)速系統(tǒng)的功率因數(shù),改善其效率。
2 異步電動(dòng)機(jī)串級(jí)調(diào)速系統(tǒng)原理
異步電動(dòng)機(jī)串級(jí)調(diào)速系統(tǒng)是在繞線(xiàn)式異步電動(dòng)機(jī)的轉(zhuǎn)子回路中串入一個(gè)與轉(zhuǎn)子回路頻率相同的交流附加電勢(shì),如圖1所示。通過(guò)改變附加電勢(shì)的幅值和相位實(shí)現(xiàn)調(diào)速。
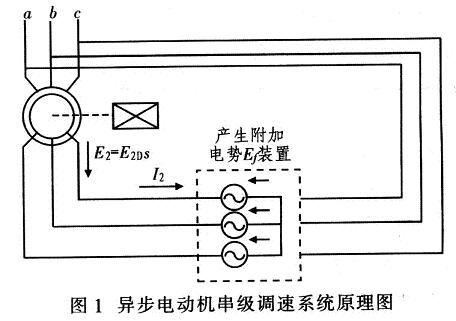
異步電動(dòng)機(jī)串級(jí)調(diào)速系統(tǒng)如何通過(guò)改變Ef相位調(diào)節(jié)電機(jī)轉(zhuǎn)速。假定電動(dòng)機(jī)拖動(dòng)恒轉(zhuǎn)矩負(fù)載,轉(zhuǎn)子每相電流,2為:
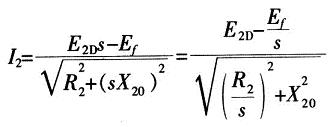
電動(dòng)機(jī)產(chǎn)生的轉(zhuǎn)矩M=CMφI2cosψ2,I2值的減小使電動(dòng)機(jī)轉(zhuǎn)矩亦相應(yīng)減小,電動(dòng)機(jī)轉(zhuǎn)矩值小于負(fù)載轉(zhuǎn)矩值的狀態(tài),穩(wěn)定運(yùn)轉(zhuǎn)條件被破壞,迫使電動(dòng)機(jī)降速。隨著轉(zhuǎn)速的降低,s的值增大,轉(zhuǎn)子電流I2回升,轉(zhuǎn)矩M亦相應(yīng)回升,直到電動(dòng)機(jī)轉(zhuǎn)矩與負(fù)載轉(zhuǎn)矩相等時(shí),減速過(guò)程結(jié)束,電動(dòng)機(jī)就在此轉(zhuǎn)速下穩(wěn)定運(yùn)轉(zhuǎn),即串入與E2相位相反的附加電勢(shì)Ef幅值愈大,電動(dòng)機(jī)的穩(wěn)定轉(zhuǎn)速就愈低。反之亦然。
3 異步電動(dòng)機(jī)串級(jí)調(diào)速系統(tǒng)功率因數(shù)分析
串級(jí)調(diào)速裝置的容量與調(diào)速范圍成正比,當(dāng)要求的調(diào)速范圍不寬時(shí),裝置的容量較小,可降低費(fèi)用。但傳統(tǒng)的晶閘管串級(jí)調(diào)速系統(tǒng)存在突出的缺點(diǎn):功率因數(shù)低、無(wú)功損耗大。其原因有以下幾方面:
(1)串級(jí)調(diào)速系統(tǒng)中的逆變變壓器需要由電網(wǎng)吸收無(wú)功功率QB,這是造成總功率因數(shù)低的主要原因。
串級(jí)調(diào)速系統(tǒng)總的功率因數(shù)為:
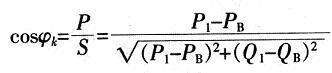
串級(jí)調(diào)速系統(tǒng)從電網(wǎng)吸收的總有功功率為P=P1一PB,而從電網(wǎng)吸收的總無(wú)功功率為Q=Q1+QB,使得串級(jí)調(diào)速系統(tǒng)總功率因數(shù)較低。
(2)串級(jí)調(diào)速系統(tǒng)中轉(zhuǎn)子整流電路存在嚴(yán)重的換流重疊現(xiàn)象,引起電動(dòng)機(jī)轉(zhuǎn)子電流落后于轉(zhuǎn)子電壓相位μ/2,使電動(dòng)機(jī)本身運(yùn)轉(zhuǎn)的功率因數(shù)變差,即cosψD=cosψcos(μ/2)
(3)串級(jí)調(diào)速系統(tǒng)中電動(dòng)機(jī)和逆變變壓器的電流波形發(fā)生畸變,其電流的高次諧波分量引起無(wú)功的畸變功率,使串級(jí)調(diào)速系統(tǒng)的總功率因數(shù)亦變壞。提高功率因數(shù)的關(guān)鍵是如何減少?gòu)碾娋W(wǎng)中吸收的無(wú)功功率。
4 幾種改進(jìn)串級(jí)調(diào)速方案分析
4.1 三相四線(xiàn)雙晶閘管串級(jí)調(diào)速系統(tǒng)
三相四線(xiàn)雙晶閘管串級(jí)調(diào)速的核心是在異步電動(dòng)機(jī)轉(zhuǎn)子回路串入4線(xiàn)式變流器,該電路用輔助的晶閘管為無(wú)功功率提供了通路,從而提高了系統(tǒng)的功率因數(shù)。其控制方法是通過(guò)控制主橋晶閘管和輔助晶閘管輪流導(dǎo)通,使逆變橋直流側(cè)電壓在線(xiàn)電壓與相電壓之間跳變,從而達(dá)到提高功率因數(shù)的目的。
4.2 新型GTO串級(jí)調(diào)速系統(tǒng)
新型GT0串級(jí)調(diào)速系統(tǒng)是在逆變器的直流側(cè)并聯(lián)一個(gè)GTO元件,并通過(guò)PWM方式控制GT0的導(dǎo)通和關(guān)斷,改變直流回路逆變電壓,從而調(diào)節(jié)電動(dòng)機(jī)轉(zhuǎn)速。該方案中PWM的控制方式,可按逆變器的逆變角β固定在正角或β角固定在負(fù)角兩種不同方式控制,達(dá)到不同情況下提高裝置功率因數(shù)的目的。
4.3 新型三相四線(xiàn)雙IGBT串級(jí)調(diào)速方案
對(duì)于新型GTO串級(jí)調(diào)速系統(tǒng),尤其在β角為負(fù)的情況下,通過(guò)裝置向電網(wǎng)回饋無(wú)功,較大地改善了系統(tǒng)功率因數(shù),但其回饋電流的波形較差,電壓損失較大,晶閘管關(guān)斷不可靠,由于采用PWM控制,系統(tǒng)裝置也比較復(fù)雜。
為此,需要尋求一種簡(jiǎn)單、高效的新型轉(zhuǎn)差回饋調(diào)速裝置,使其能更大程度地提高系統(tǒng)功率因數(shù),從而引入三相四線(xiàn)制雙IGBT串級(jí)調(diào)速方案,其原理如圖2所示。繞線(xiàn)式異步電動(dòng)機(jī)的轉(zhuǎn)子輸出電壓,經(jīng)整流后與三相橋式晶閘管逆變電路相連;VT7,VT8為兩個(gè)輔助開(kāi)關(guān)元件IGBT,它為無(wú)功功率提供了通路,RCD網(wǎng)絡(luò)并聯(lián)于IGBT兩端,起限制IGBT峰值電壓的作用。
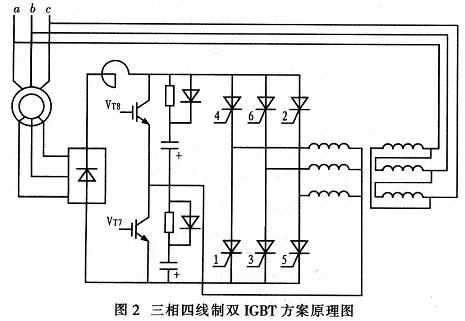
這種方案的基本思想是以傳統(tǒng)串級(jí)調(diào)速裝置為基礎(chǔ),在逆變器的直流側(cè)并聯(lián)兩個(gè)輔助可關(guān)斷元件IGBT,其中點(diǎn)與逆變變壓器(2次側(cè)采用星形接法)中性點(diǎn)相接。按照一定的控制方式,將逆變角β固定在一個(gè)較小角度,通過(guò)控制逆變橋晶閘管和2個(gè)IGBT元件的導(dǎo)通和關(guān)斷改變逆變電壓,進(jìn)而調(diào)節(jié)電動(dòng)機(jī)的轉(zhuǎn)速,達(dá)到提高功率因數(shù)的目的。
5 新型三相四線(xiàn)雙IGBT串級(jí)調(diào)速控制方案
以逆變橋中5號(hào)晶閘管(VT5)與1號(hào)晶閘管(VT1)的換相為例分析該方案中IGBT器件的控制方法。圖3示出了逆變橋中IGBT與晶閘管的控制脈沖順序,其中,逆變角β固定在零處,IGBT導(dǎo)通角δ變化范圍為0°~120°。
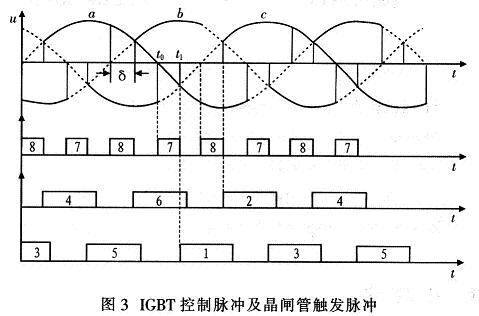
在a,c兩相自然換相點(diǎn)(t1時(shí)刻)前t0時(shí)刻,控制觸發(fā)VT7導(dǎo)通。VT7管的導(dǎo)通給VT5管加上一個(gè)反向電壓,IGBT是全控器件,控制脈沖的寬度決定了晶閘管導(dǎo)通時(shí)間,VT7導(dǎo)通適當(dāng)?shù)慕嵌?delta;,則會(huì)給VT5施加足夠時(shí)間的反壓,保證VT5在t1時(shí)刻前可靠關(guān)斷,這樣在t1時(shí)刻觸發(fā)VT1管時(shí),就不會(huì)出現(xiàn)同組2個(gè)晶閘管同時(shí)導(dǎo)通的現(xiàn)象,避免了逆變失敗。當(dāng)VT1導(dǎo)通一定角度(120°-δ)后,再次控制VT7導(dǎo)通,可靠關(guān)斷VT1管,在下一個(gè)自然換相點(diǎn)處觸發(fā)VT3導(dǎo)通,依次循環(huán)下去,從而實(shí)現(xiàn)了有源逆變。VT8管對(duì)VT2,VT4,VT6管的換相控制同上。
此外,IGBT不僅實(shí)現(xiàn)了輔助換相作用,還具有調(diào)節(jié)逆變電壓的作用。逆變角β固定不變,當(dāng)增加IGBT導(dǎo)通時(shí)間后,晶閘管關(guān)斷時(shí)間提前,導(dǎo)通時(shí)間變短,從而降低了逆變電壓。因此,通過(guò)改變IGBT脈沖控制角δ的大小,可以改變逆變電壓,進(jìn)而調(diào)節(jié)電動(dòng)機(jī)轉(zhuǎn)速。